首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
19,201 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
10,151 阅读
3
【高数】形心计算公式讲解大全
8,760 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,456 阅读
5
Vivado-FPGA Verilog烧写固化教程
6,838 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
嵌入式&系统(共66篇)
找到
66
篇与
嵌入式&系统
相关的结果
- 第 6 页
2021-02-19
STM32上特殊管脚应用 重映射那个GPIO_Remap_SWJ_JTAGDisable
对于初学习者来说为什么用到PB3和PB4时无法控制输出呢? 下面就这一问题进行分析讲解。 首先,STM32F10x系列的MCU复位后,PA13/14/15 & PB3/4默认配置为JTAG功能。有时我们为了充分利用MCU I/O口的资源,会把这些 端口设置为普通I/O口。具体方法如下: 在GPIO_Configuration(); // 配置使用的 GPIO 口: GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE); // 改变指定管脚的映射 GPIO_Remap_SWJ_Disable SWJ 完全禁用(JTAG+SW-DP) GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE); // 改变指定管脚的映射 GPIO_Remap_SWJ_JTAGDisable ,JTAG-DP 禁用 + SW-DP 使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12 | GPIO_Pin_13; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); 注意:不要忘记在RCC_Configuration()中开启AFIO时钟, //AFIO时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
嵌入式&系统
刘航宇
5年前
0
640
0
2021-02-16
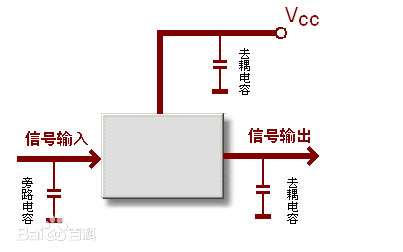
旁路电容-数字地上存在干扰,会导致控制芯片输出异常吗?
地端电压0v左右有个范围,波动太大,可能间接性工作需要旁路电容改善 旁路电容是可将混有高频电流和低频电流的交流电中的高频成分旁路滤掉的电容。 对于同一个电路来说,旁路(bypass)电容是把输入信号中的高频噪声作为滤除对象,把前级携带的高频杂波滤除,而去耦(decoupling,也称退耦)电容是把输出信号的干扰作为滤除对象。 简介 可将混有高频电流和低频电流的交流信号中的高频成分旁路滤掉的电容,称做“旁路电容”。 旁路电容的主要功能是产生一个交流分路,从而消去进入易感区的那些不需要的能量,即当混有高频和低频的信号经过放大器被放大时,要求通过某一级时只允许低频信号输入到下一级,而不需要高频信号进入,则在该级的输入端加一个适当大小的接地电容,使较高频率的信号很容易通过此电容被旁路掉(这是因为电容对高频阻抗小),而低频信号由于电容对它的阻抗较大而被输送到下一级放大。 对于同一个电路来说,旁路(bypass)电容是把输入信号中的高频噪声作为滤除对象,把前级携带的高频杂波滤除,而去耦(decoupling,也称退耦)电容是把输出信号的干扰作为滤除对象 [1] 。 图片
嵌入式&系统
# 电子线路
刘航宇
5年前
0
461
1
2021-02-15
微型计算机可任意启动/停止的电子秒表
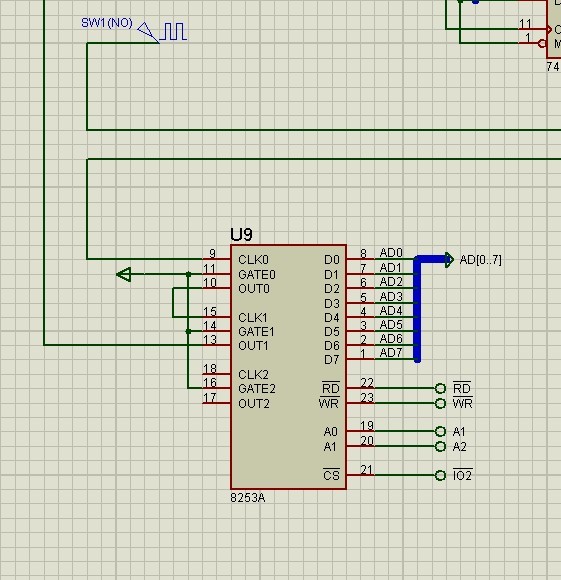
一、电子秒表课程设计要求 6位LED数码显示,计时单位为1/100秒。利用功能键进行启/停控制。其功能为:上电后计时器清0,当第一次(或奇数次)按下启/停键时开始计数。第2次(或偶数次)按下该键时停止计时,再一次按启/停键时清零后重新开始计时。 二、关键字 8086 8255 8253 控制字三、摘要 用汇编语言设计数字秒表,用PROTUES仿真软件搭建的硬件电路上正确显示,并且具有开始停止清零功能。用8086作为处理器,8253做定时功能产生0.01S的脉冲,8255具备锁存和并行输出功能,驱动7段数码管正确显示,并且具有足够高的精度。。 四、综合实验目的: 通常,学习知识是由浅入深、由此及彼,一点点的学习和积累的,而应用知识则是综合运用所积累的知识来分析和解决实际问题、从知识的系统性来检验对各层次知识的掌握程度。 综合实验的目的是让学生把理论学习和实验教学阶段所掌握的知识通过一个设计实例,经历一次理论和实践结合、软件和硬件结合的综合训练,也是一次工程实践能力的检验。这次综合实验大家应当把它作为毕业设计的预演。 锻炼通过各种媒体和途径主动获取知识的能力。 五、引言 使用8253的通道0 工作在方式0计数,,并选用二进制技术,控制字36H,计数初值500,对1MHZ的CLK计数产生2000HZ的输出脉冲给1,2通道的CLK,通道一选用二进制计数即计数结束中断方式0,初值20产生非屏蔽中断0.01S非屏蔽中断送给8086的NMI产生中断的脉冲,8086开始计数即毫秒位计数并显示,并与10比较,等于给分秒位加一, 毫秒位置清零,分秒位与6比较若相等清零秒各位加一,秒个位与10比较若等于清零秒十位加一,秒十位与6比较若等于清零分个位加1,分个位与10比较若等于清零分十位加一,分十位与6比较若等于全部清零。 1、使用各芯片的作用及工作原理 1)定时器/计数器8253 用系统8253定时器提供的1MHZ定时单位,设计秒表定时程序。 有关系统定时方法:PC机系统中的8253定时器0工作于方式3,外部提供一个时钟作为CLK信号, 频率:f=1MHz。 定时器0输出方波的频率:2000 Hz。 定时器1输出方波100HZ,输出方波周期Tout=1/100=1ms。8253A每隔1ms引起一次中断,作为定时信号。可用1ms作基本计时单位。 1图片 当A1A0分别为00 01 10 11时分别选中三个通道和控制字寄存器在8088系统中,8088的A1A0分别与8253的A1A0相连在8086系统中,通常将8253的8位数据线与8086的低8位相连,即使用偶地址,所以8086的A2A1分别与8253的A1A0相连。计数器(0 ~ 2)即三个计数器/定时器通道。每个通道包括:8位控制字寄存器、16位计数初值寄存器、减一计数器和输出锁存器。作定时器用:其CLK端上的输入脉冲应是标准的、精确的;作计数器用:对其CLK端上的脉冲计数,脉冲宽度可以不等。采用减一计数器,为0时,从OUT端上输出一个脉冲定时时间 = 时钟脉冲周期X预置的计数初值。 控制功能表 CS RD WR A1A0 功 能 0 1 0 0 0 写计数器0 0 1 0 0 1 写计数器1 0 1 0 1 0 写计数器2 0 1 0 1 1 写控制字寄存器 0 0 1 0 0 读计数器0 0 0 1 0 1 读计数器1 0 0 1 1 0 读计数器2 0 0 1 1 1 无操作 1 X X X X 禁止使用 0 1 1 X X 无操作 每个通道: CLK 计数脉冲或标准脉冲输入端 GATE 允许端,当GATE=1时允许计数 UT 计数值为0时输出一个脉冲 由于8253的读/写操作对系统时钟没有特殊的要求,因此它几乎可以应用与由任何一种微处理器组成的系统中,可作为可编程的方波频率发生器、分频器、实时时钟、事件计数器和单脉冲发生器等。8253是一片具有三个独立的16位计数器通道的可编程定时器/计数器芯片。每个通道都可以编程设定3种工作方式之一种;8253由以下几个部分组成: (1) 数据总线缓冲器(8位、三态、双向); (2) 读/写控制逻辑;CS:片选信号,低电平有效; RD:读信号,低电平有效; WR:写信号,低电平有效 A1A0:端口选择信号 (3) 三个通道( 0 ~ 2),由A0,A1控制选择; (4) 一个控制寄存器;2)用可编程并行接口芯片8255的PA口以及PB口实现数码管输出,PC口实现按键实现数据显示输出 8255 可编程外围接口芯片是 Intel 公司生产的通用并行I/O 接口芯片,它具有A、B、C 三个并行接口,并行接口是以数据的字节为单位与I/O 设备或被控制对象之间传递信息。CPU 和接口之间 的数据传送总是并行的,即可以同时传递8 位、16 位、32 位等。用+5V 单电源供电,能在以下三种方式下工作:方式0--基本输入/出方式、方式1--选通输入/出方式、方式2--双向选通工作方式。 本课程设计8255控制字1000010001,即是方式选择0控制A口输出控制C口高四位输入B组方式0输出C口低四位输入。即B口数码管段输出控制,A口数码管的位控制。C口低四位用于启动停止输入接口。 2图片 3). 锁存器273 74LS273是8位数据/地址锁存器,他是一种带清除功能的8D触发器,下面介绍一下他的管脚图功能表等资料。(1).1脚是复位CLR,低电平有效,当1脚是低电平时,输出脚2(Q0)、5(Q1)、6(Q2)、9(Q3)、12(Q4)、15(Q5)、16(Q6)、19(Q7)全部输出0,即全部复位; (2).当1脚为高电平时,11(CLK)脚是锁存控制端,并且是上升沿触发锁存,当11脚有一个上升沿,立即锁存输入脚3、4、7、8、13、14、17、18的电平状态,并且立即呈现在在输出脚2(Q0)、5(Q1)、6(Q2)、9(Q3)、12(Q4)、15(Q5)、16(Q6)、19(Q7)上. 74ls273管脚功能: 1D~8D为数据输入端,1Q~8Q为数据输出端,正脉冲触发,低电平清除,常用作8位地址锁存器。 4)、译码器74ls154 74ls154为4—16线制译码器其引脚图如下图所示 3图片 5). 7段数码管 数码管要正常显示,就要来驱动数码管的各个段码,从而显示出我们要的数字,因此根据数码管的驱动方式的不同,可以分为静态式和动态式两类。 静态显示驱动 静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。静态驱动的优点是编程简单,显示亮度高,缺点是占用I/O端口多,如驱动5个数码管静态显示则需要5×8=40根I/O端口来驱动,实际应用时必须增加译码驱动器进行驱动,增加了硬件电路的复杂性。 动态显示驱动 数码管动态显示接口是单片机中应用最为广泛的一种显示方式之一,动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O线控制。4图片 六、程序代码 DATAS SEGMENT DW 100 DUP(?) ZXM DB 3fH,06H,5bH,4fH,66H,6dH,7dH,07H,7fH,6fH HOU1 DB 0 HOU2 DB 0 MIN1 DB 0 MIN2 DB 0 SEC1 DB 0 SEC2 DB 0 ; buf BYTE 0,1,2,3,4,5,6,7,8,9;显示缓冲区 ; FLAG BYTE 0 ; STATE BYTE 0 ; KEYMARK BYTE 0;此处输入数据段代码 DATAS ENDS STACKS SEGMENT DW 100 DUP(?) STACKS ENDS CODES SEGMENT ASSUME CS:CODES,DS:DATAS,SS:STACKS START: ;;;;;;;;;;;;;;;;;;中断初始化 PUSH DS PUSH BX MOV AX,0000H MOV DS,AX MOV BX,0008H MOV DX,OFFSET TIAOSHI MOV [BX],DX MOV BX,000AH MOV DX,SEG TIAOSHI MOV [BX],DX POP BX POP DS MOV AX,DATAS MOV DS,AX MOV AX,DATAS MOV SS,AX ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; MOV AL,89H ;8255 A口和B口输出,C口输入 MOV DX,206H OUT DX,AL MOV AL,3FH MOV DX,202H OUT DX,AL ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;; MOV AL,00110110B ;初始化8253,CNT0; MOV DX,0406H OUT DX,AL MOV AX,500 MOV DX,0400H OUT DX,AL MOV AL,AH OUT DX,AL MOV AL,01010000B ; CNT1 ; MOV DX,0406H OUT DX,AL MOV DX,0402H MOV AL,20 OUT DX,AL ;;;;;;;;;;;;;;;;;;;;;;;;;;;;; SHUCHU: LEA SI,ZXM MOV BX,0000H MOV AL,11111110B MOV DX,200H OUT DX,AL MOV BL,SEC2 MOV AL,[SI+BX] MOV DX,202H OUT DX,AL MOV CX,200H S1: LOOP S1 MOV AL,11111101B MOV DX,200H OUT DX,AL MOV BL,SEC1 MOV AL,[SI+BX] MOV DX,202H OUT DX,AL MOV CX,200H S2: LOOP S2 MOV AL,11111011B MOV DX,200H OUT DX,AL MOV BL,MIN2 MOV AL,[SI+BX] MOV DX,202H OUT DX,AL MOV CX,200H S3: LOOP S3 MOV AL,11110111B MOV DX,200H OUT DX,AL MOV BL,MIN1 MOV AL,[SI+BX] MOV DX,202H OUT DX,AL MOV CX,200H S4: LOOP S4 MOV AL,11101111B MOV DX,200H OUT DX,AL MOV BL,HOU2 MOV AL,[SI+BX] MOV DX,202H OUT DX,AL MOV CX,200H S5: LOOP S5 MOV AL,11011111B MOV DX,200H OUT DX,AL MOV BL,HOU1 MOV AL,[SI+BX] MOV DX,202H OUT DX,AL MOV CX,200H S6: LOOP S6 JMP SHUCHU PANDUAN: INC SEC2 CMP SEC2,0AH JNZ SHUCHU MOV SEC2,0 INC SEC1 CMP SEC1,0AH JNZ SHUCHU MOV SEC1,0 INC MIN2 CMP MIN2,0AH JNZ SHUCHU MOV MIN2,0 INC MIN1 CMP MIN1,06H JNZ SHUCHU MOV MIN1,0 INC HOU2 CMP HOU2,0AH JNZ SHUCHU MOV HOU2,0 INC HOU1 CMP HOU1,06H JNZ SHUCHU MOV HOU1,0 JMP SHUCHU TIAOSHI PROC ;;;;;;;;;;;;中断子程序 MOV AL,01010000B ; 初始化CNT1 ; MOV DX,0406H OUT DX,AL MOV DX,0402H MOV AL,20 OUT DX,AL JMP PANDUAN ;;;;;;;;;;;;;;;;;;;;;;; RET TIAOSHI ENDP DELAY PROC PUSH CX MOV CX,29h W10MS: LOOP W10MS POP CX RET DELAY ENDP CODES ENDS END START5图片
嵌入式&系统
刘航宇
5年前
2
1,974
4
2021-02-14
电容、电感、电阻参数测量系统设计
目录 一、设计任务和要求 二、单元电路设计和参数计算 三、总原理图及元器件清单 四、附录 一、设计任务和要求 1、设计并制作一个元器件参数测量仪。 2、电阻阻值测量,范围:100Ω~1MΩ; 3、电容容值测量,范围:100pF~10000pF; 4、测量精度:±5% ; 5、电感参数的测量; 6、扩大量程; 7、提高测量精度; 系统设计图图片 二、单元电路设计和参数计算 1、电阻的检测单元电路设计 电阻检测图片 从而,可以计算得出电阻值的大小。 2、电容的检测单元电路设计 电容检测图片 从而,可以计算得出电容值的大小。 3、电感的检测单元电路设计 电感检测图片 从而,可以计算得出电感值的大小。 三、总原理图及元器件清单 总电路图片 实物图图片 (2)元器件清单 表1 原理图中所使用的元器件清单 元件序号 型号 数量 备注 U1 STC89C52RC 1 单片机 R3 A103J 1 排阻 R2,R3,R17,R18 10KΩ 4 电位器 X1 11.0592M 1 晶振 C3 25V,10uF 1 电解电容 C1,C2,C11 103(0.01uF) 3 瓷片电容 R1,R13,R18 10KΩ 3 电阻 J1,J2,J3,J4 4 按键 U2 1602 1 液晶 A1,A2 NE555 2 555定时器 R4 300Ω 1 电阻 R5,R6 510KΩ 2 电阻 C4,C5,C6,C7,C8,C9 104(0.1uF) 6 瓷片电容 R7,R9 100KΩ 2 电阻 C10 50V,22uF 1 电解电容 Q1,Q2,Q3 S9108(NPN型) 3 三极管 R10 2KΩ 1 电阻 R8,R11,R14 1KΩ 3 电阻 C12,C13 50V,47uF 2 电解电容 R12,R19 39KΩ 2 电阻 R15,R16 51Ω 2 电阻 C14 25V,470uF 1 电解电容 U3 NE55532 1 运放 四、附录 软件程序 //RCL测量仪程序 //初始化 #include <reg52.h> #define uint unsigned int #define uchar unsigned char #define ulong unsigned long #define PI 3.1415926 uchar code table1[8]="Welcome! RCL detector"; uchar table2[16]="f(Hz)="; uchar table3[16]="R(Ohm)="; uchar table4[16]="C(pF)="; uchar table5[16]="L(uH)="; uchar num,a=0,th0,tl0; uint C,L; ulong f,R; sbit lcden=P2^4; //液晶使能端 sbit lcdrs=P2^5; //液晶数据命令选择端 sbit key_R=P1^5; //测量电阻按键 sbit key_C=P1^6; //测量电容按键 sbit key_L=P1^7; //测量电感按键 sbit R_out=P1^2; //测量电阻信号输入 sbit C_out=P1^3; //测量电容信号输入 sbit L_out=P1^4; //测量电感信号输入 //声明子函数 void delayms(uint xms); //延时函数 void write_com(uchar com); //液晶写命令函数 void write_data(uchar date); //液晶写数据函数 void led_init(); //液晶初始化函数 void t_init(); //定时器0初始化函数 void keyscan(); //键盘检测函数(确定被测元件为电阻、电容或电感) void display_f(ulong f); //频率显示函数 void display_R(ulong R); //电阻显示函数 void display_C(uint C); //电容显示函数 void display_L(uint L); //电感显示函数 //主函数 void main() { led_init(); t_init(); keyscan(); write_com(0x01); while(1) { display_f(f); switch(a) { case 1:R=(ulong)(5000000.0/0.6931472/f-150+0.5);display_R(R);break; case 2:C=(int)(100000000.0/153/0.6931472/f+0.5);display_C(C);break; case 3:L=(int)(1000000000000.0/0.1/PI/PI/f/f+0.5);display_L(L);break; } } } //中断函数 void T0_count() interrupt 1 { switch(a) { case 1:while(R_out); while(!R_out); TH0=0; TL0=0; while(R_out); while(!R_out); th0=TH0; tl0=TL0; TR0=0; break; case 2:while(C_out); while(!C_out); TH0=0; TL0=0; while(C_out); while(!C_out); th0=TH0; tl0=TL0; TR0=0; break; case 3:while(L_out); while(!L_out); TH0=0; TL0=0; while(L_out); while(!L_out); th0=TH0; tl0=TL0; TR0=0; break; } f=1000000.0/1.085069/(th0*256+tl0)+0.5; } //延时函数 void delayms(uint xms) { uint i,j; for(i=xms;i>0;i--) for(j=110;j>0;j--); } //液晶写命令函数 void write_com(uchar com) { lcdrs=0; P0=com; delayms(5); lcden=1; delayms(5); lcden=0; } //液晶写数据函数 void write_data(uchar date) { lcdrs=1; P0=date; delayms(5); lcden=1; delayms(5); lcden=0; } //液晶初始化函数 void led_init() { lcden=0; write_com(0x38); //设置16×2显示,5×7点阵,8位数据接口 write_com(0x0c); //设置开显示,不显示光标 write_com(0x06); //写一个字符后地址指针加1 write_com(0x01); //显示清0,数据指针清0 write_com(0x80); //显示欢迎界面 for(num=0;num<8;num++) { write_data(table1[num]); delayms(5); } } //定时器0初始化函数 void t_init() { TMOD=0x01; //设置定时器0工作方式1(M1M0=0x0001) TH0=0; //装初值 TL0=0; EA=1; //开总中断 ET0=1; //开定时器0中断 TR0=1; //启动定时器0 } //键盘检测函数(确定被测元件为电阻、电容或电感) void keyscan() { if(key_R==0) { delayms(10); if(key_R==0) a=1; } else if(key_C==0) { delayms(10); if(key_C==0) a=2; } else if(key_L==0) { delayms(10); if(key_L==0) a=3; } else while(key_R&&key_C&&key_L); //按键按下时退出死循环 } //频率显示函数 void display_f(ulong f) { uchar count=0; ulong f0; f0=f; while(f) { f=f/10; count++; } for(num=5+count;num>5;num--) { table2[num]=f0%10+48; f0=f0/10; } write_com(0x80); for(num=0;num<6+count;num++) { write_data(table2[num]); delayms(5); } } //电阻显示函数 void display_R(ulong R) { uchar count=0; ulong R0; R0=R; while(R) { R=R/10; count++; } for(num=6+count;num>6;num--) { table3[num]=R0%10+48; R0=R0/10; } write_com(0x80+0x40); for(num=0;num<7+count;num++) { write_data(table3[num]); delayms(5); } } //电容显示函数 void display_C(uint C) { uchar count=0; uint C0; C0=C; while(C) { C=C/10; count++; } for(num=5+count;num>5;num--) { table4[num]=C0%10+48; C0=C0/10; } write_com(0x80+0x40); for(num=0;num<6+count;num++) { write_data(table4[num]); delayms(5); } } //电感显示函数 void display_L(uint L) { uchar count=0; uint L0; L0=L; while(L) { L=L/10; count++; } for(num=5+count;num>5;num--) { table5[num]=L0%10+48; L0=L0/10; } write_com(0x80+0x40); for(num=0;num<6+count;num++) { write_data(table5[num]); delayms(5); } }
嵌入式&系统
# 嵌入式
刘航宇
5年前
5
2,012
3
2021-02-13
如何判断运放是工作在线性区还是非线性区
一般来说, 1.有负反馈的都是在线性区。比如各种同相、反相、差分放大电路都属于这种; 2.无反馈(亦称开环),或正反馈工作在非线性区。如比较器、振荡器电路都属于这类。 另外多说一句,这二者的区别本质上是由运放的增益非常大(至少上百万)决定的。 集成运放工作于线性区时,就是处于闭环状态下,这时候运放的输出电压与输入信号电压之间存在某种特定的线性(函数)关系。 集成运放工作于非线性区时,就是处于开环状态下,这时候运放的输出电压会接近工作电源的正电压或负电压,与输入信号电压没有线性关系。 (1)有负反馈才可能工作在线性范围. (2)输出不饱和就是在线性范围. 积分电路工作在线性范围,而矩形波电路(正反馈)输出不是正饱和就是负饱和,一定是非线性的. 通常认为理想的集成运放具有下列特性: 开环电压增益 ; 差模输入电阻 ; 输出电阻 ; 共模抑制比 ; 上限截止频率 ; 差模输入电阻 ,说明输入电压没有损耗。 输出电阻 ,说明带负载能力强。 共模抑制比 ,说明抑制零点漂移能力强。 上限截止频率 ,说明对各段信号,不论是低频、中频、高频都能有效放大。 根据理想化条件,理想运放在线性区的特点,当集成运算放大器线性工作时,应满足 ,由于输出电压 为有限值, ,所以输入差模电压 必为0,即 由此得到 ,所以同相输入与反相输入端电压相等。 又根据理想条件集成运放的差模输入电阻趋于无穷大,所以流进运放的两输入端电流 ,后面的 和 都用 表示,且。 通过以上分析,我们可以得到理想运放的两个重要的特点。一个是虚短,另一个虚断。 虚短:由于两输入端之间的电压差为0,相当于两输入端短路,但又不是真正的短路,故称为“虚短”。虚短实际上指的是两输入端的电压相同,也就是 。 虚断:由于 ,相当于两输入端开路,但又不是真正的断开,故称为“虚断”,虚断表明两输入端没有电流。 显然,理想运放是不存在的,但只要实际运放的性能较好,其应用效果与理想运放很接近,就可以把它近似看成理想运放。 下面,我们理想运放的基本应用。集成运放的两种基本电路,一种是反相输入放大电路,一种是同相输入放大电路。要使运放工作在线性放大状态,必须引入负反馈。 因为运放的开环增益很大,开环时很小的输入电压,不引入负反馈,运放本身的失调就会使它超出线性范围。
嵌入式&系统
刘航宇
5年前
0
6,709
14
2021-02-13
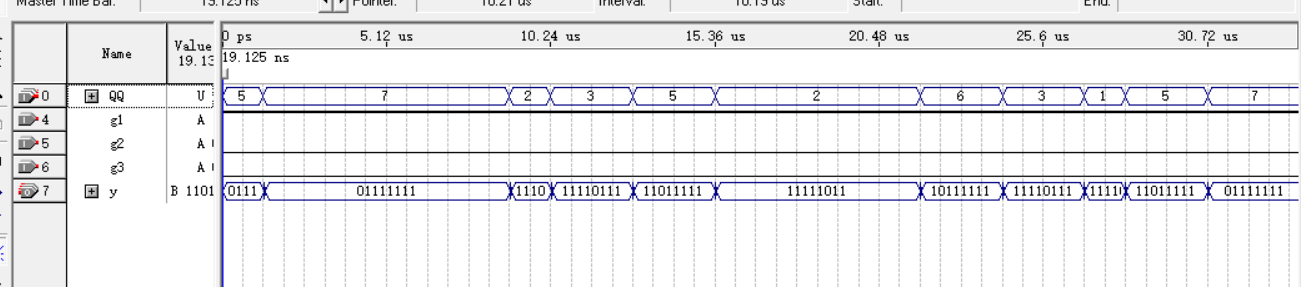
VHDL语言38译码器
元件查看端口方法Tool>>Netlist Viewers>>RTL Viewers library ieee; use ieee.std_logic_1164.all; entity decoder38 is port (a,b,c,g1,g2,g3:in std_logic; y:out std_logic_vector(7 downto 0)); end decoder38; architecture rtl of decoder38 is signal cba: std_logic_vector(2 downto 0); begin cba<=c&b&a; process(cba,g1,g2,g3) begin if (g1='1' and g2='0' and g3='0') then case cba is when "000"=>y<="11111110"; when "001"=>y<="11111101"; when "010"=>y<="11111011"; when "011"=>y<="11110111" ; when "100"=>y<="11101111" ; when "101"=>y<="11011111" ; when "110"=>y<="10111111" ; when "111"=>y<="01111111"; when others=>y<="XXXXXXXX"; end case; else y<="11111111"; end if; end process; end rtl;实验现象图片
嵌入式&系统
刘航宇
5年前
0
403
1
上一页
1
...
5
6