首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
19,162 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
10,125 阅读
3
【高数】形心计算公式讲解大全
8,748 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,444 阅读
5
Vivado-FPGA Verilog烧写固化教程
6,806 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
刘航宇(共304篇)
找到
304
篇与
刘航宇
相关的结果
- 第 5 页
2023-04-02
【数字IC笔面必备】同步FIFO与异步FIFO
同步FIFO 同步FIFO相对异步FIFO较为简单,FIFO:先入先出 FIFO原则:满不能写,空不能读。 关键:full和empty信号如何产生? 方法1:用长度计数器factor。执行一次写操作,factor加1,执行一次读操作,factor减1。 方法2:地址位扩展一位,用最高位来判断空满。读地址=写地址,则空;读地址与写地址相差一个存储空间长度,则满。 对于方法1来说比较简单,本文重点讲异步FIFO,对于同步FIFO我们给出伪代码,读者自行补全该模块全部代码。 图片 图片 图片 图片 异步FIFO 异步FIFO的整体结构大致如下: Write_control:控制写操作与满信号(w_full)的判断与产生。 Read_control:控制读操作与空信号(r_empty)的判断与产生。 RAM:双端口数据存取RAM。 Bin_to_gray:二进制码转格雷码模块。用于将读写地址二进制码转成格雷码。 SYN:跨时钟同步模块,即将读地址的格雷码(r_g_addr)向w_clk同步;将写地址的格雷码(w_g_addr)向r_clk同步。主要操作就是通过寄存器打两拍。 图片 使用扩展地址位来判断空满,读写信号时钟不同。 关键在于格雷码使用,同步可以不用格雷码,异步两时钟不一样,采用出错概率大,普通二进制码会出现多个错误,而格雷码每次跳转只会有一位发生变化,出错概率小且顶多是使得FIFO的读或者写操作暂停。 详细解释: 图片 在中间状态采样,这个是不可能避免的,这是异步系统天生的缺陷。我们的目标是:即使在中间状态采样,也不能影响空满状态的判断。符合这个要求的编码方式是:每次只能有1个bit发生改变。为什么这么说呢?因为当只有一一个bit发生改变时,即使在中间状态采样,其结果也不外乎两种:递增前原指针和递增后新指针。显然递增后新指针是最新情况的反映,如果采样到这个指针,那么和我们的设计预期是一致的,如果采样到递增前的原指针,会有什么结果呢?假设现在采样读指针,那么最坏的情况就是把“不满”判断成了“满”,使得本来被允许的写操作被禁止了,但是这并不会对逻辑产生影响,只是带来了写操作的延迟。同样的,如果现在采样写指针,那么最坏的情况就是把“不空”判断成“空”,使得本来被允许的读操作被禁止了,但是这也不会对逻辑产生影响,只是带来了读操作的延迟 显然每次之变化1个bit的编码方案可以有效解决中间态下空满状态的判断问题,格雷码就是这样一种编码。 关键点解释 1.跨时钟域传递信号做时钟同步一般通过打两拍。 2.采用格雷码编码(解决汇聚问题),因为格雷码每次跳转只会有一位发生变化,所以如果出现不确定状态也只会有两种状况,即正确变化了和不变。因此在读写时钟不一样的情况下,纵使读写地址每bit同步过程中出现延时不一致,也不会使得FIFO在实际空或者满之后,FIFO却没有正确的产生出空满信号。只有可能是实际没有空或者满,但产生了空满信号,但这对于FIFO的功能不会有影响,只会使得FIFO的读或者写操作暂停。 3.读比写时钟更快,只会只出现实际没满,但误判为满;不会对功能(数据流)造成错误。 4.写比读时钟更快,只会出现实际没空,但误判为空;不会对功能(数据流)造成错误。 verilog格雷码生成 观察下面码表,格雷码最高位与原码一致,其它位对应原码相邻两位相互异或的结果 图片 module bin_to_gray #( parameter WIDTH_D = 5 )( input [WIDTH_D-1:0] bin_c, output [WIDTH_D-1:0] gray_c ); wire h_b; assign h_b = bin_c[WIDTH_D-1]; reg [WIDTH_D-2:0] gray_c_d; integer i; always @( * ) for( i=0;i<WIDTH_D-1;i=i+1 ) gray_c_d[i] = bin_c[i]^bin_c[i+1]; assign gray_c = {h_b,gray_c_d}; endmodule源程序下载 异步FIFO源程序 下载地址:https://wwek.lanzoub.com/iBiJF0rxkgli 提取码:
FPGA&ASIC
# ASIC/FPGA
# 笔试面试
刘航宇
3年前
0
786
2
3~4月的花花,浅浅的记录一下~
最近在长安区遇到的3~4月的花花,浅浅的记录一下~ 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片
我的随笔
# 随笔
刘航宇
3年前
1
493
4
2023-03-27
电子信息类领域情诗
图片 你是我心中的NE555 你让我充满了电流和电压 你是我灵魂的数字芯片 你让我拥有了逻辑和智慧 你的眼睛如LED般光彩 你的微笑如LCD般温暖 你的声音如DAC般动听 你的气息如FPGA般灵活 我想和你一起创造 电路、程序、系统、应用 我想和你一起分享 数据、信号、信息、感情 你是我的输入和输出 你是我的模拟和数字 你是我的并行和串行 你是我的高频和低频 图片
我的随笔
# 随笔
刘航宇
3年前
0
515
2
2023-03-21
IC/SOC封装类型与对应成本关系
根据引脚引出的不同,封装可分为外围和阵列封装。根据有无封装连线分为有连接线的( Wire Bond)和倒装片(Flip-chip) 封装。其中,外围封装形式有DIP、PLCC、QFP、SOP等,如图14-23所示。此类封装的优点是价格便宜,板级可靠性比较高。但是其电性能和热性能较差,并且受到I/O引脚数目的限制,如PQFP (Plastic Quad Flat Package,塑料四边引脚扁平封装),I/O 引脚数目也只能达到208~240个。 图片 阵列封装包括有连线的BGA和无连线的Flip-chip BGA等,如图14-24 所示。此类封装的优点是I/O密度高,板级集成的成品率高,但是价格相对较高。 图片 (1) BGA封装 BGA封装技术的出现是封装技术的一大突破,它是近几年来推动封装市场的强有力的技术之一,BGA封装一改传统的封装结构,将引线从封装基板的底部以阵列球的方式引出,这样不仅可以安排更多的IO,而且大大提高了封装密度,改进了电性能。如果它再采用MCP (多芯片模块)封装或倒装片技术,有望进一步提高产 品的速度和降低复杂性。 目前, BGA封装按照基板的种类,主要分为PBGA (塑封BGA)、CBGA (陶瓷BGA)、TBGA (载带BGA)、MBGA (金属BGA)等。图14-25以PBGA为例进行说明,PBGA中的焊球做在 PWB基板上,基板是BT多层布线基板(2~4层),封装采用的焊球材料为共晶或准共晶Pb-Sn 合金、焊球和封装体的连接不需要另外的焊料。 图片 (2)倒装片封装(Flip Chip Packages) 倒装片技术是一种先进的,非常有前途的集成电路封装技术。封装倒装片是一一种由 IBM公司最先使用的先进封装技术,它是利用倒装技术将芯片直接装入一- 个封装体内。倒装片封装可以是单芯片也可以是多芯片形式,其发展历史已将近40年,主要在手持或移动电子产品中使用广泛。一般芯片都是面朝上安装互连,而此类技术则是芯片面朝下,芯片上的焊区直接与基板上的焊区互连,如图14-26所示。因此,倒装封装的互连线非常短,由互连线产生的电容、电阻和电感也比其他封装形式小得多,具有较高的电性能和热性能。此外,采用此类封装的芯片焊区可面阵布局,更适于多I/O数的VLSI芯片使用。当然,倒装技术也有不足之处,如芯片面朝下安装互连,给工艺操作带来一定难度一焊 点检查困难,板级可靠性需要解决,费用也偏高。 图片 (3)多芯片封装(MCP, Multi Chip Package) 多芯片封装是20世纪90年代兴起的- -种混合微电子组装技术,它是在高密度多层布线基板上,将若干裸芯片IC组装和互连,构成更复杂的或具有子系统功能的高级电子组件,常见的有Flash+MCU、Flash+MCU+SRAM、 SRAM+MCU和Analog IC+Digital IC+Memory等组合。图14-27 所示为MCP封装的示意图。 图片 目前,MCP多采用IC芯片叠层放置,可大大节约基板的面积,其主要特点是布线密度高,互连线短,体积小,重量轻和性能高等。但是由于封装了多块芯片,使得良品率有所下降,并且测试相对较困难,测试成本也很高。
FPGA&ASIC
# ASIC/FPGA
刘航宇
3年前
0
1,157
2
2023-03-18
【优惠活动】26考研西北大学电子信息类专业全程班
pEVCsrd.png图片 26考研专业全程班优惠活动来啦! 所有课程https://edu.ee.ac.cn/ 奖品内容 活动内容 兑奖条件 声明&收奖方式 赠送资料 26考研西北大学843班(学习通上课):https://mooc1.chaoxing.com/course/249631535.html 课程二维码: m6eq51qr.png图片 目录 奖品内容 活动时间5.6日~5.20日 💻 特等奖奖优惠150元 📱 一等奖优惠100元 💿 二等奖优惠80元 📗 三等奖优惠50元 ✉ 四等奖优惠30元 只要参与98%概率中奖任何一个 兑奖成功后当日有效 活动内容 点开下面2个网页任何一个都可,然后点击分享到QQ空间或微信朋友圈,配上文案:西北大学843电子信息类考研全程班,有需要可以了解,QQ群:519462257。 任选一个 网页一 https://mooc1.chaoxing.com/course/249631535.html 网页二 https://edu.ee.ac.cn/ 兑奖条件 1、转发后需要获得至少5个人的点赞 2、转发后3天内不可删除转发消息,否则取消兑奖资格 3、完成后凭截图参与抽奖 声明&收奖方式 满足活动条件后请将截图发至以下任一核实地方 1、截图发至QQ:2091645818/微信:eecslab 2、截图上传至评论区 发送上面二个任意一个都可以,核实后奖品会立刻发放 每人仅能参与1次,中奖额度与赞数无关,达到最低要求即可 图片 西北大学26考研班:包含数电、模电、 电路 三科知识点讲解、划重点、送初复试资料、真题模拟题带刷带练、 复试指导等 拟定课时不低于90课时,课时更新中课程链接: 点击进入课程 赠送资料 西北大学843、849历年真题 下载地址:https://wwek.lanzoue.com/ip1gv2m1mg3c 提取码: 免费笔记入口 模拟电子技术 数字电子技术
我的随笔
刘航宇
3年前
18
1,813
7
使用Verilog实现与仿真AMBA--AHB总线协议(三)
1、AHB从机 AHB从机应答来自系统主主机发起的传输。从机使用从译码器输出的 HSELx 信号来决定它什么时候作应答。其它传输需要的信号,如地址与控制信息由主机产生。 下图为一个AHB从机的接口框图: 图片 下面是一个AHB接口的SRAM控制器的程序: //------------------------------------------------------------------------------ // File : ahb_sram.v // Editor : VSCode, Tab Size(4) // Description : Top Module of AHB SRAM Controller. // //------------------------------------------------------------------------------ `timescale 1ns / 1ps module ahb_sram #( parameter SYNC_RESET = 1, parameter AHB_DWIDTH = 32, parameter AHB_AWIDTH = 32, parameter SIZE_IN_BYTES = 2048, parameter ADD_WIDTH = $clog2(SIZE_IN_BYTES) ) ( //---------------------------------- // IO Declarations //---------------------------------- // Inputs input HCLK, input HRESETN, input HSEL, input HREADYIN, input [1:0] HTRANS, input [2:0] HBURST, input [2:0] HSIZE, input [AHB_DWIDTH-1:0] HWDATA, input [AHB_AWIDTH-1:0] HADDR, input HWRITE, // Outputs output [AHB_DWIDTH-1:0] HRDATA, output [1:0] HRESP, output HREADYOUT ); //---------------------------------- // Variable Declarations //---------------------------------- wire [ADD_WIDTH-1:0] HADDR_cal; wire [2:0] ahbsram_size; wire [ADD_WIDTH-1:0] ahbsram_addr; wire [31:0] ahbsram_wdata; wire ahbsram_write; wire [31:0] sramahb_rdata; wire sramahb_ack; //---------------------------------- // Start of Main Code //---------------------------------- assign HADDR_cal = HADDR[ADD_WIDTH-1:0]; // Instantiations ahb_sram_if #( .AHB_DWIDTH (AHB_DWIDTH), .AHB_AWIDTH (AHB_AWIDTH), .ADD_WIDTH (ADD_WIDTH), .SYNC_RESET (SYNC_RESET) ) u_ahb_sram_if ( .HCLK (HCLK), .HRESETN (HRESETN), .HSEL (HSEL), .HTRANS (HTRANS), .HBURST (HBURST), .HWRITE (HWRITE), .HWDATA (HWDATA), .HSIZE (HSIZE), .HADDR (HADDR_cal), .HREADYIN (HREADYIN), // From SRAM Control signals .sramahb_ack (sramahb_ack), .sramahb_rdata (sramahb_rdata), // Outputs .HREADYOUT (HREADYOUT), .HRESP (HRESP), // To SRAM Control signals .ahbsram_req (ahbsram_req), .ahbsram_write (ahbsram_write), .ahbsram_wdata (ahbsram_wdata), .ahbsram_size (ahbsram_size), .ahbsram_addr (ahbsram_addr), .HRDATA (HRDATA) ); sram_ctrl_if #( .ADD_WIDTH (ADD_WIDTH), .SYNC_RESET (SYNC_RESET) ) u_sram_ctrl_if ( .HCLK (HCLK), .HRESETN (HRESETN), // From AHB Interface signals .ahbsram_req (ahbsram_req), .ahbsram_write (ahbsram_write), .ahbsram_wdata (ahbsram_wdata), .ahbsram_size (ahbsram_size), .ahbsram_addr (ahbsram_addr), // Outputs // To AHB Interface signals .sramahb_ack (sramahb_ack), .sramahb_rdata (sramahb_rdata) ); endmodule //------------------------------------------------------------------------------ // File : ahb_sram_if.v // Editor : VSCode, Tab Size(4) // Description : // //------------------------------------------------------------------------------ `timescale 1ns / 1ps module ahb_sram_if #( parameter AHB_DWIDTH = 32, parameter AHB_AWIDTH = 32, parameter ADD_WIDTH = 11, parameter SYNC_RESET = 0 ) ( //---------------------------------- // IO Declarations //---------------------------------- // Inputs input HCLK, input HRESETN, input HSEL, input HREADYIN, input [1:0] HTRANS, input [2:0] HBURST, input [2:0] HSIZE, input [ADD_WIDTH-1:0] HADDR, input [AHB_DWIDTH-1:0] HWDATA, input HWRITE, input sramahb_ack, input [AHB_DWIDTH-1:0] sramahb_rdata, // Outputs output HREADYOUT, output [1:0] HRESP, output reg [AHB_DWIDTH-1:0] HRDATA, output ahbsram_req, output ahbsram_write, output [AHB_AWIDTH-1:0] ahbsram_wdata, output [2:0] ahbsram_size, output [ADD_WIDTH-1:0] ahbsram_addr ); //---------------------------------- // Local Parameter Declarations //---------------------------------- // State Machine parameters localparam IDLE = 2'b00; localparam AHB_WR = 2'b01; localparam AHB_RD = 2'b10; parameter RESP_OKAY = 2'b00; parameter RESP_ERROR = 2'b01; // AHB HTRANS definition parameter TRN_IDLE = 2'b00; parameter TRN_BUSY = 2'b01; parameter TRN_SEQ = 2'b11; parameter TRN_NONSEQ = 2'b10; parameter SINGLE = 3'b000; parameter INCR = 3'b001; parameter WRAP4 = 3'b010; parameter INCR4 = 3'b011; parameter WRAP8 = 3'b100; parameter INCR8 = 3'b101; parameter WRAP16 = 3'b110; parameter INCR16 = 3'b111; //---------------------------------- // Variable Declarations //---------------------------------- reg [1:0] HTRANS_d; reg [2:0] HBURST_d; reg [2:0] HSIZE_d; reg [ADD_WIDTH-1:0] HADDR_d; reg [AHB_DWIDTH-1:0] HWDATA_d; reg HWRITE_d; reg HSEL_d; reg HREADYIN_d; reg [1:0] ahbcurr_state; reg [1:0] ahbnext_state; reg latchahbcmd; reg ahbsram_req_int; reg ahbsram_req_d1; reg [AHB_DWIDTH-1:0] HWDATA_cal; reg [4:0] burst_count; reg [4:0] burst_count_reg; reg [4:0] count; wire aresetn; wire sresetn; //---------------------------------- // Start of Main Code //---------------------------------- assign aresetn = (SYNC_RESET==1) ? 1'b1 : HRESETN; assign sresetn = (SYNC_RESET==1) ? HRESETN : 1'b1; // Generation of valid AHB Command which triggers the AHB Slave State Machine assign validahbcmd = HREADYIN & HSEL & (HTRANS == TRN_NONSEQ); // Generation of HRESP assign HRESP = RESP_OKAY; always @(*) begin HWDATA_cal = HWDATA; end // Latch all the AHB signals always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin HADDR_d <= {20{1'b0}}; HWDATA_d <= {32{1'b0}}; HTRANS_d <= 2'b00; HSIZE_d <= 2'b00; HBURST_d <= 3'b000; HWRITE_d <= 1'b0; HSEL_d <= 1'b0; HREADYIN_d <= 1'b0; end else if (HREADYIN == 1'b1 & HSEL == 1'b1 & HREADYOUT == 1'b1) begin HADDR_d <= HADDR; HTRANS_d <= HTRANS; HSIZE_d <= HSIZE; HBURST_d <= HBURST; HWRITE_d <= HWRITE; HWDATA_d <= HWDATA_cal; HSEL_d <= HSEL; HREADYIN_d <= HREADYIN; end end // Current State generation always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin ahbcurr_state <= IDLE; end else begin ahbcurr_state <= ahbnext_state; end end // Next State and output decoder logic always @(*) begin latchahbcmd = 1'b0; ahbsram_req_int = 1'b0; ahbnext_state = ahbcurr_state; case (ahbcurr_state) IDLE : begin if (HREADYIN == 1'b1 && HSEL == 1'b1 && ((HTRANS == TRN_NONSEQ) || HTRANS == TRN_SEQ)) begin latchahbcmd = 1'b1; if (HWRITE == 1'b1) begin ahbnext_state = AHB_WR; end else begin ahbnext_state = AHB_RD; end end else begin ahbnext_state = IDLE; end end AHB_WR : begin latchahbcmd = 1'b0; ahbsram_req_int = 1'b1; if (sramahb_ack == 1'b1) begin if (count == burst_count_reg) begin ahbnext_state = IDLE; end else begin ahbsram_req_int = 1'b0; end end end AHB_RD : begin latchahbcmd = 1'b0; ahbsram_req_int = 1'b1; if (sramahb_ack == 1'b1) begin ahbnext_state = IDLE; end end default : begin ahbnext_state = IDLE; end endcase end // LOGIC FOR BURST COUNT always @(*) begin burst_count = burst_count_reg; if (HSEL == 1'b1 && HTRANS == TRN_NONSEQ && HREADYIN == 1'b1 && HREADYOUT == 1'b1) begin case (HBURST) SINGLE : burst_count = 5'b00001; WRAP4,INCR4 : burst_count = 5'b00100; WRAP8,INCR8 : burst_count = 5'b01000; WRAP16,INCR16 : burst_count = 5'b10000; default : burst_count = 4'b0001; endcase end end always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin burst_count_reg <= 'h0; end else begin burst_count_reg <= burst_count; end end always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin count <= 5'h0; end else begin if (count == burst_count_reg) begin count <= 5'h0; end else if (ahbsram_req == 1'b1) begin count <= count + 1'b1; end else begin count <= count; end end end assign HREADYOUT = !ahbsram_req_int; // Generation of signals required for SRAM assign ahbsram_write = ahbsram_req ? HWRITE_d : 1'b0; assign ahbsram_wdata = HWDATA; assign ahbsram_addr = ahbsram_req ? HADDR_d : HADDR_d; assign ahbsram_size = ahbsram_req ? HSIZE_d : HSIZE_d; always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin ahbsram_req_d1 <= 1'b0; end else begin ahbsram_req_d1 <= ahbsram_req_int; end end // Generate the request to the SRAM contol logic when there is AHB read or write request assign ahbsram_req = ahbsram_req_int & !ahbsram_req_d1; // HRDATA generation always @(*) begin if (HREADYOUT && HREADYIN) begin HRDATA = sramahb_rdata; end else begin HRDATA = sramahb_rdata; end end endmodule //------------------------------------------------------------------------------ // File : sram_ctrl_if.v // Editor : VSCode, Tab Size(4) // Description : // //------------------------------------------------------------------------------ `timescale 1ns / 1ps module sram_ctrl_if #( parameter AHB_DWIDTH = 32, parameter ADD_WIDTH = 11, parameter SYNC_RESET = 0 ) ( //---------------------------------- // IO Declarations //---------------------------------- // Inputs input HCLK, input HRESETN, input ahbsram_req, input ahbsram_write, input [2:0] ahbsram_size, input [ADD_WIDTH-1:0] ahbsram_addr, input [AHB_DWIDTH-1:0] ahbsram_wdata, // Outputs output sramahb_ack, output reg [AHB_DWIDTH-1: 0] sramahb_rdata ); //---------------------------------- // Local Parameter Declarations //---------------------------------- // State Machine parameters localparam S_IDLE = 2'b00; localparam S_WR = 2'b01; localparam S_RD = 2'b10; //---------------------------------- // Variable Declarations //---------------------------------- reg [3:0] sram_wen_mem; reg [1:0] sramcurr_state; reg [1:0] sramnext_state; reg sram_wen; reg sram_ren; reg sramahb_ack_int; reg sram_ren_d; reg sram_done; wire [AHB_DWIDTH-1:0] ram_rdata; wire aresetn; wire sresetn; //---------------------------------- // Start of Main Code //---------------------------------- assign aresetn = (SYNC_RESET == 1) ? 1'b1 : HRESETN; assign sresetn = (SYNC_RESET == 1) ? HRESETN : 1'b1; // Current State generation always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin sramcurr_state <= S_IDLE; end else begin sramcurr_state <= sramnext_state; end end // Next State and output decoder logic always @(*) begin sramahb_ack_int = 1'b0; sram_wen = 1'b0; sram_ren = 1'b0; sramnext_state = sramcurr_state; case (sramcurr_state) S_IDLE : begin if (ahbsram_req == 1'b1) begin if (ahbsram_write == 1'b1) begin sramnext_state = S_WR; sram_wen = 1'b1; end else begin sram_ren = 1'b1; sramnext_state = S_RD; end end end S_WR : begin if (sram_done == 1'b1) begin sramnext_state = S_IDLE; sramahb_ack_int = 1'b1; end end S_RD : begin if (sram_done == 1'b1) begin sramnext_state = S_IDLE; sramahb_ack_int = 1'b1; end end default : begin sramnext_state = S_IDLE; end endcase end always @(*) begin sram_wen_mem = 4'b0000; if (ahbsram_size == 3'b010) begin sram_wen_mem = {4{sram_wen}}; end else if (ahbsram_size == 3'b001) begin case (ahbsram_addr[1]) 1'b0 : begin sram_wen_mem[0] = sram_wen; sram_wen_mem[1] = sram_wen; sram_wen_mem[2] = 1'b0; sram_wen_mem[3] = 1'b0; end 1'b1 : begin sram_wen_mem[0] = 1'b0; sram_wen_mem[1] = 1'b0; sram_wen_mem[2] = sram_wen; sram_wen_mem[3] = sram_wen; end endcase end else if (ahbsram_size == 3'b000) begin case (ahbsram_addr[1:0]) 2'b00 : begin sram_wen_mem[0] = sram_wen; sram_wen_mem[1] = 1'b0; sram_wen_mem[2] = 1'b0; sram_wen_mem[3] = 1'b0; end 2'b01 : begin sram_wen_mem[0] = 1'b0; sram_wen_mem[1] = sram_wen; sram_wen_mem[2] = 1'b0; sram_wen_mem[3] = 1'b0; end 2'b10 : begin sram_wen_mem[0] = 1'b0; sram_wen_mem[1] = 1'b0; sram_wen_mem[2] = sram_wen; sram_wen_mem[3] = 1'b0; end 2'b11 : begin sram_wen_mem[0] = 1'b0; sram_wen_mem[1] = 1'b0; sram_wen_mem[2] = 1'b0; sram_wen_mem[3] = sram_wen; end endcase end else begin sram_wen_mem = {4{sram_wen}}; end end // SRAM Instantiations sram_model #( .SYNC_RESET (SYNC_RESET), .ADDR_WIDTH (ADD_WIDTH) ) u_sram_model ( .writedata (ahbsram_wdata), .readdata (ram_rdata[31:0]), .wren (sram_wen_mem), .rden (sram_ren), .writeaddr (ahbsram_addr[ADD_WIDTH-1:2]), .readaddr (ahbsram_addr[ADD_WIDTH-1:2]), .clk (HCLK), .resetn (HRESETN) ); always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin sramahb_rdata <= 32'h0; end else if (sram_ren_d == 1'b1) begin sramahb_rdata <= ram_rdata; end else begin sramahb_rdata <= sramahb_rdata; end end always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin sram_ren_d <= 32'h0; end else begin sram_ren_d <= sram_ren; end end // Generate the SRAM done when the SRAM wren/rden is done always @(posedge HCLK or negedge aresetn) begin if ((aresetn == 1'b0) || (sresetn == 1'b0)) begin sram_done <= 1'b0; end else if (sram_wen || sram_ren) begin sram_done <= 1'b1; end else begin sram_done <= 1'b0; end end // Generate the SRAM ack assign sramahb_ack = sramahb_ack_int; endmodule //------------------------------------------------------------------------------ // File : sram_model.v // Editor : GVIM, Tab Size(4) // Description : FPGA Block Ram/Onchip SRAM. // //------------------------------------------------------------------------------ `timescale 1ns / 1ps module sram_model #( parameter SYNC_RESET = 0, parameter ADDR_WIDTH = 16 ) ( //---------------------------------- // IO Declarations //---------------------------------- input [31:0] writedata, output [31:0] readdata, input [3:0] wren, input rden, input [ADDR_WIDTH-1:2] writeaddr, input [ADDR_WIDTH-1:2] readaddr, input clk, input resetn ); //---------------------------------- //--Local Parameter Declarations //---------------------------------- localparam AWT = ((1<<(ADDR_WIDTH-2))-1); //---------------------------------- // Variable Declarations //---------------------------------- reg [7:0] bram0[AWT:0]; reg [7:0] bram1[AWT:0]; reg [7:0] bram2[AWT:0]; reg [7:0] bram3[AWT:0]; reg [ADDR_WIDTH-3:0] addr_q1; reg rden_r = 1'b0; wire [31:0] readdata_i; wire aresetn; wire sresetn; //---------------------------------- // Start of Main Code //---------------------------------- assign aresetn = (SYNC_RESET == 1) ? 1'b1 : resetn; assign sresetn = (SYNC_RESET == 1) ? resetn : 1'b1; always @(posedge clk) begin rden_r <= rden; end // Infer Block RAM always @(posedge clk) begin if (wren[0]) bram0[writeaddr] <= writedata[7:0]; if (wren[1]) bram1[writeaddr] <= writedata[15:8]; if (wren[2]) bram2[writeaddr] <= writedata[23:16]; if (wren[3]) bram3[writeaddr] <= writedata[31:24]; end always @(posedge clk) begin addr_q1 <= readaddr[ADDR_WIDTH-1:2]; end assign readdata_i = {bram3[addr_q1],bram2[addr_q1],bram1[addr_q1],bram0[addr_q1]}; assign readdata = rden_r ? readdata_i : {32{1'b0}}; endmodule下面是测试用例代码: //------------------------------------------------------------------------------ // File : top_tb.v // Editor : VSCode, Tab Size(4) // Description : Testbench of AHB SRAM Controller. // //------------------------------------------------------------------------------ `timescale 1ns / 1ps module top_tb(); //---------------------------------- // Local Parameter Declarations //---------------------------------- localparam AHB_CLK_PERIOD = 5; // Assuming AHB CLK to be 100MHz localparam SIZE_IN_BYTES =2048; //---------------------------------- // Variable Declarations //---------------------------------- reg HCLK = 0; wire HWRITE; wire [1:0] HTRANS; wire [2:0] HSIZE; wire [2:0] HBURST; wire HREADYIN; wire [31:0] HADDR; wire [31:0] HWDATA; wire HREADYOUT; wire [1:0] HRESP; wire [31:0] HRDATA; reg HRESETn; //---------------------------------- // Start of Main Code //---------------------------------- //----------------------------------------------------------------------- // Generate HCLK //----------------------------------------------------------------------- always #AHB_CLK_PERIOD HCLK <= ~HCLK; //----------------------------------------------------------------------- // Generate HRESETn //----------------------------------------------------------------------- initial begin HRESETn = 1'b0; repeat(5) @(posedge HCLK); HRESETn = 1'b1; end ahb_master #( .START_ADDR (32'h0), .DEPTH_IN_BYTES (SIZE_IN_BYTES) ) u_ahb_master ( .HRESETn (HRESETn), .HCLK (HCLK), .HADDR (HADDR), .HTRANS (HTRANS), .HWRITE (HWRITE), .HSIZE (HSIZE), .HBURST (HBURST), .HWDATA (HWDATA), .HRDATA (HRDATA), .HRESP (HRESP), .HREADY (HREADYOUT) ); ahb_sram # ( .AHB_AWIDTH (32), .AHB_DWIDTH (32), .SIZE_IN_BYTES (SIZE_IN_BYTES), .SYNC_RESET (1) ) u_ahb_sram ( .HCLK (HCLK), .HRESETN (HRESETn), .HSEL (1'b1), .HWRITE (HWRITE), .HADDR (HADDR), .HWDATA (HWDATA), .HRDATA (HRDATA), .HSIZE (HSIZE), .HTRANS (HTRANS), .HBURST (HBURST), .HRESP (HRESP), .HREADYIN (1'b1), .HREADYOUT (HREADYOUT) ); `ifdef VCS initial begin $fsdbDumpfile("top_tb.fsdb"); $fsdbDumpvars; end initial begin `ifdef DUMP_VPD $vcdpluson(); `endif end `endif endmodule这个模块主要是产生了时钟和复位信号,例化了待测模块,以及一个AHB Master的功能模型。具体见下面的代码: //------------------------------------------------------------------------------ // File : ahb_master.v // Editor : VSCode, Tab Size(4) // Description : AHB Master Simulation Model. // //------------------------------------------------------------------------------ `timescale 1ns / 1ps `define SINGLE_TEST `define BURST_TEST module ahb_master #( //---------------------------------- // Paramter Declarations //---------------------------------- parameter START_ADDR = 0, parameter DEPTH_IN_BYTES = 32'h100, parameter END_ADDR = START_ADDR+DEPTH_IN_BYTES-1 ) ( //---------------------------------- // IO Declarations //---------------------------------- input wire HRESETn, input wire HCLK, output reg [31:0] HADDR, output reg [1:0] HTRANS, output reg HWRITE, output reg [2:0] HSIZE, output reg [2:0] HBURST, output reg [31:0] HWDATA, input wire [31:0] HRDATA, input wire [1:0] HRESP, input wire HREADY ); //---------------------------------- // Variable Declarations //---------------------------------- reg [31:0] data_burst[0:1023]; //---------------------------------- // Start of Main Code //---------------------------------- initial begin HADDR = 0; HTRANS = 0; HWRITE = 0; HSIZE = 0; HBURST = 0; HWDATA = 0; while(HRESETn === 1'bx) @(posedge HCLK); while(HRESETn === 1'b1) @(posedge HCLK); while(HRESETn === 1'b0) @(posedge HCLK); `ifdef SINGLE_TEST repeat(3) @(posedge HCLK); memory_test(START_ADDR, END_ADDR, 1); memory_test(START_ADDR, END_ADDR, 2); memory_test(START_ADDR, END_ADDR, 4); `endif `ifdef BURST_TEST repeat(5) @(posedge HCLK); memory_test_burst(START_ADDR, END_ADDR, 1); memory_test_burst(START_ADDR, END_ADDR, 2); memory_test_burst(START_ADDR, END_ADDR, 4); memory_test_burst(START_ADDR, END_ADDR, 6); memory_test_burst(START_ADDR, END_ADDR, 8); memory_test_burst(START_ADDR, END_ADDR, 10); memory_test_burst(START_ADDR, END_ADDR, 16); memory_test_burst(START_ADDR, END_ADDR, 32); memory_test_burst(START_ADDR, END_ADDR, 64); memory_test_burst(START_ADDR, END_ADDR, 128); memory_test_burst(START_ADDR, END_ADDR, 255); repeat(5) @(posedge HCLK); `endif $finish(2); end //----------------------------------------------------------------------- // Single transfer test //----------------------------------------------------------------------- task memory_test; input [31:0] start; // start address input [31:0] finish; // end address input [2:0] size; // data size: 1, 2, 4 integer i; integer error; reg [31:0] data; reg [31:0] gen; reg [31:0] got; reg [31:0] reposit[START_ADDR:END_ADDR]; begin $display("%m: read-after-write test with %d-byte access", size); error = 0; gen = $random(7); for (i = start; i < (finish-size+1); i = i + size) begin gen = $random & ~32'b0; data = align(i, gen, size); ahb_write(i, size, data); ahb_read(i, size, got); got = align(i, got, size); if (got !== data) begin $display("[%10d] %m A:%x D:%x, but %x expected", $time, i, got, data); error = error + 1; end end if (error == 0) $display("[%10d] %m OK: from %x to %x", $time, start, finish); $display("%m read-all-after-write-all with %d-byte access", size); error = 0; gen = $random(1); for (i = start; i < (finish-size+1); i = i + size) begin gen = {$random} & ~32'b0; data = align(i, gen, size); reposit[i] = data; ahb_write(i, size, data); end for (i = start; i < (finish-size+1); i = i + size) begin data = reposit[i]; ahb_read(i, size, got); got = align(i, got, size); if (got !== data) begin $display("[%10d] %m A:%x D:%x, but %x expected", $time, i, got, data); error = error + 1; end end if (error == 0) $display("[%10d] %m OK: from %x to %x", $time, start, finish); end endtask //----------------------------------------------------------------------- // Burst transfer test //----------------------------------------------------------------------- task memory_test_burst; input [31:0] start; // start address input [31:0] finish; // end address input [7:0] leng; // burst length integer i; integer j; integer k; integer r; integer error; reg [31:0] data; reg [31:0] gen; reg [31:0] got; reg [31:0] reposit[0:1023]; integer seed; begin $display("%m: read-all-after-write-all burst test with %d-beat access", leng); error = 0; seed = 111; gen = $random(seed); k = 0; if (finish > (start+leng*4)) begin for (i = start; i < (finish-(leng*4)+1); i = i + leng*4) begin for (j = 0; j < leng; j = j + 1) begin data_burst[j] = $random; reposit[j+k*leng] = data_burst[j]; end @(posedge HCLK); ahb_write_burst(i, leng); k = k + 1; end gen = $random(seed); k = 0; for (i = start; i < (finish-(leng*4)+1); i = i + leng*4) begin @(posedge HCLK); ahb_read_burst(i, leng); for (j = 0; j < leng; j = j + 1) begin if (data_burst[j] != reposit[j+k*leng]) begin error = error+1; $display("%m A=%hh D=%hh, but %hh expected",i+j*leng, data_burst[j], reposit[j+k*leng]); end end k = k + 1; r = $random & 8'h0F; repeat(r) @(posedge HCLK); end if (error == 0) $display("%m %d-length burst read-after-write OK: from %hh to %hh",leng, start, finish); end else begin $display("%m %d-length burst read-after-write from %hh to %hh ???",leng, start, finish); end end endtask //----------------------------------------------------------------------- // As AMBA AHB bus uses non-justified data bus scheme, data should be // aligned according to the address. //----------------------------------------------------------------------- function [31:0] align; input [ 1:0] addr; input [31:0] data; input [ 2:0] size; // num of bytes begin `ifdef BIG_ENDIAN case (size) 1 : case (addr[1:0]) 0 : align = data & 32'hFF00_0000; 1 : align = data & 32'h00FF_0000; 2 : align = data & 32'h0000_FF00; 3 : align = data & 32'h0000_00FF; endcase 2 : case (addr[1]) 0 : align = data & 32'hFFFF_0000; 1 : align = data & 32'h0000_FFFF; endcase 4 : align = data&32'hFFFF_FFFF; default : $display($time,,"%m ERROR %d-byte not supported for size", size); endcase `else case (size) 1 : case (addr[1:0]) 0 : align = data & 32'h0000_00FF; 1 : align = data & 32'h0000_FF00; 2 : align = data & 32'h00FF_0000; 3 : align = data & 32'hFF00_0000; endcase 2 : case (addr[1]) 0 : align = data & 32'h0000_FFFF; 1 : align = data & 32'hFFFF_0000; endcase 4 : align = data&32'hFFFF_FFFF; default : $display($time,,"%m ERROR %d-byte not supported for size", size); endcase `endif end endfunction `include "ahb_transaction_tasks.v" endmodule这个模块主要是实现了两个testcase,一个是测试single传输,另一个测试burst传输。AHB读写传输任务被封装在ahb_transaction_tasks.v文件中: //------------------------------------------------------------------------------ // File : ahb_transaction_tasks.v // Editor : VSCode, Tab Size(4) // Description : AHB Transaction Tasks. // //------------------------------------------------------------------------------ `ifndef __AHB_TRANSACTION_TASKS_V__ `define __AHB_TRANSACTION_TASKS_V__ //----------------------------------------------------------------------- // AHB Read Task //----------------------------------------------------------------------- task ahb_read; input [31:0] address; input [2:0] size; output [31:0] data; begin @(posedge HCLK); HADDR <= #1 address; HTRANS <= #1 2'b10; // NONSEQ; HBURST <= #1 3'b000; // SINGLE; HWRITE <= #1 1'b0; // READ; case (size) 1 : HSIZE <= #1 3'b000; // BYTE; 2 : HSIZE <= #1 3'b001; // HWORD; 4 : HSIZE <= #1 3'b010; // WORD; default : $display($time,, "ERROR: unsupported transfer size: %d-byte", size); endcase @(posedge HCLK); while (HREADY !== 1'b1) @(posedge HCLK); HTRANS <= #1 2'b0; // IDLE @(posedge HCLK); while (HREADY === 0) @(posedge HCLK); data = HRDATA; // must be blocking if (HRESP != 2'b00) $display($time,, "ERROR: non OK response for read"); @(posedge HCLK); end endtask //----------------------------------------------------------------------- // AHB Write Task //----------------------------------------------------------------------- task ahb_write; input [31:0] address; input [2:0] size; input [31:0] data; begin @(posedge HCLK); HADDR <= #1 address; HTRANS <= #1 2'b10; // NONSEQ HBURST <= #1 3'b000; // SINGLE HWRITE <= #1 1'b1; // WRITE case (size) 1 : HSIZE <= #1 3'b000; // BYTE 2 : HSIZE <= #1 3'b001; // HWORD 4 : HSIZE <= #1 3'b010; // WORD default : $display($time,, "ERROR: unsupported transfer size: %d-byte", size); endcase @(posedge HCLK); while (HREADY !== 1) @(posedge HCLK); HWDATA <= #1 data; HTRANS <= #1 2'b0; // IDLE @(posedge HCLK); while (HREADY === 0) @(posedge HCLK); if (HRESP != 2'b00) $display($time,, "ERROR: non OK response write"); @(posedge HCLK); end endtask //----------------------------------------------------------------------- // AHB Read Burst Task //----------------------------------------------------------------------- task ahb_read_burst; input [31:0] addr; input [31:0] leng; integer i; integer ln; integer k; begin k = 0; @(posedge HCLK); HADDR <= #1 addr; addr = addr + 4; HTRANS <= #1 2'b10; // NONSEQ if (leng >= 16) begin HBURST <= #1 3'b111; // INCR16 ln = 16; end else if (leng >= 8) begin HBURST <= #1 3'b101; // INCR8 ln = 8; end else if (leng >= 4) begin HBURST <= #1 3'b011; // INCR4 ln = 4; end else begin HBURST <= #1 3'b001; // INCR ln = leng; end HWRITE <= #1 1'b0; // READ HSIZE <= #1 3'b010; // WORD @(posedge HCLK); while (HREADY == 1'b0) @(posedge HCLK); while (leng > 0) begin for (i = 0; i < ln-1; i = i + 1) begin HADDR <= #1 addr; addr = addr + 4; HTRANS <= #1 2'b11; // SEQ; @(posedge HCLK); while (HREADY == 1'b0) @(posedge HCLK); data_burst[k%1024] <= HRDATA; k = k + 1; end leng = leng - ln; if (leng == 0) begin HADDR <= #1 0; HTRANS <= #1 0; HBURST <= #1 0; HWRITE <= #1 0; HSIZE <= #1 0; end else begin HADDR <= #1 addr; addr = addr + 4; HTRANS <= #1 2'b10; // NONSEQ if (leng >= 16) begin HBURST <= #1 3'b111; // INCR16 ln = 16; end else if (leng >= 8) begin HBURST <= #1 3'b101; // INCR8 ln = 8; end else if (leng >= 4) begin HBURST <= #1 3'b011; // INCR4 ln = 4; end else begin HBURST <= #1 3'b001; // INCR1 ln = leng; end @(posedge HCLK); while (HREADY == 0) @(posedge HCLK); data_burst[k%1024] = HRDATA; // must be blocking k = k + 1; end end @(posedge HCLK); while (HREADY == 0) @(posedge HCLK); data_burst[k%1024] = HRDATA; // must be blocking end endtask //----------------------------------------------------------------------- // AHB Write Burst Task // It takes suitable burst first and then incremental. //----------------------------------------------------------------------- task ahb_write_burst; input [31:0] addr; input [31:0] leng; integer i; integer j; integer ln; begin j = 0; ln = 0; @(posedge HCLK); while (leng > 0) begin HADDR <= #1 addr; addr = addr + 4; HTRANS <= #1 2'b10; // NONSEQ if (leng >= 16) begin HBURST <= #1 3'b111; // INCR16 ln = 16; end else if (leng >= 8) begin HBURST <= #1 3'b101; // INCR8 ln = 8; end else if (leng >= 4) begin HBURST <= #1 3'b011; // INCR4 ln = 4; end else begin HBURST <= #1 3'b001; // INCR ln = leng; end HWRITE <= #1 1'b1; // WRITE HSIZE <= #1 3'b010; // WORD for (i = 0; i < ln-1; i = i + 1) begin @(posedge HCLK); while (HREADY == 1'b0) @(posedge HCLK); HWDATA <= #1 data_burst[(j+i)%1024]; HADDR <= #1 addr; addr = addr + 4; HTRANS <= #1 2'b11; // SEQ; while (HREADY == 1'b0) @(posedge HCLK); end @(posedge HCLK); while (HREADY == 0) @(posedge HCLK); HWDATA <= #1 data_burst[(j+i)%1024]; if (ln == leng) begin HADDR <= #1 0; HTRANS <= #1 0; HBURST <= #1 0; HWRITE <= #1 0; HSIZE <= #1 0; end leng = leng - ln; j = j + ln; end @(posedge HCLK); while (HREADY == 0) @(posedge HCLK); if (HRESP != 2'b00) begin // OKAY $display($time,, "ERROR: non OK response write"); end `ifdef DEBUG $display($time,, "INFO: write(%x, %d, %x)", addr, size, data); `endif HWDATA <= #1 0; @(posedge HCLK); end endtask `endif使用VCS仿真,打印信息如下: 图片 图片 整体仿真波形如下: 图片 不喜欢用DVE的话,也可以选择用Verdi查看波形,这种比较简单的调试,DVE也足够用了。下面贴一张突发传输的细节图: 图片 图片
IP&SOC设计
# SOC设计
刘航宇
3年前
0
601
1
2023-03-13
Verilog-位宽计算的系统函数$clog2
一、什么是$clog2 clog2 这是一个系统函数,第一次出现于Verilog-2005版本中,在IEEE中处在17.11.1节的math functions中,因为log2是2进制的对数,所以这个系统函数在电路设计的计算位宽时体现出了自身的方便性,需要注意的是,这里的$clog2是向上取整的一个系统函数,比如 $clog2(5) 虽然真实的值为2.3,但经过向上取整后,最后的输出为3 二、$clog2的优势和案例 在老的IEEE verilog版本中,假如不用clog2去计算位宽,我们可能需要如下的function函数来进行位宽计算,这个函数本身很好理解,即通过移位去检测depth的位宽,之后我们需要再将计算得到的数字使用在端口定义的过程中。 function integer clog2( input integer depth ); begin if(depth == 0) clog2 = 1; else if(depth != 0) for(clog2 = 0; depth > 0;clog2 = clog2 + 1) depth = depth >> 1; end endfunction但是引入$clog2后,原function可以简化为如下的过程,很显然,通过对系统函数 $clog2的使用,我们大大减少了设计时端口宽度定义时需要code的量。 module clog2(a,b); parameter depth = 2034; input [$clog2(depth)-1:0] a; output [$clog2(depth)-1:0]b; //details about the design endmodule 三、额外补充 在Xlinix的官网的“44586 - 13.2 Verilog $clog2 function implemented improperly”中,作者发现了13.2版本的Xlinix的ISE对clog2系统函数的错误计算,按照文章中所言:“The $clog2 function returns the ceiling of the logarithm to the base e (natural logarithm) rather than the ceiling of the logarithm to the base 2.”意味着13.2版本的ISE以e为底计算clog2,而非以2为底,官方的回复是ISE 13.2 仅支持Verilog-2001,这个问题在ISE 14.1中进行了修复,所以读者假如使用的开发套件是老版本的,或者不支持Verilog-2005,都有可能因为使用clog2产生问题,需注意。具体额外补充参考如下。 44586 - 13.2 Verilog $clog2 function implemented improperly
编程&脚本笔记
# Verilog
刘航宇
3年前
0
3,057
1
HFSS软件笔记
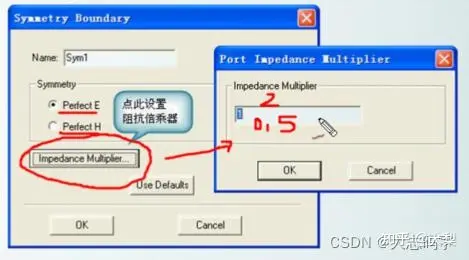
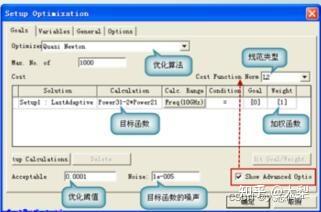
目录 一、HFSS中的边界条件(Boundaries) 二、HFSS中的激励方式(Excitation) 三、求解类型和求解设置 四、HFSS中的变量和Optimetrics模块的使用 五、HFSS的数据后处理 六、天线问题的数据后处理 # HFSS软件学习笔记 一、HFSS中的边界条件(Boundaries) 边界条件定义了求解区域的边界以及不同物体交界处的电磁场特性,是求解麦克斯韦方程的基础。 只有在假定场矢量是单值、有界、并且沿空间连续分布的前提下,微分形式的麦克斯韦方程组才是有效的;而在求解区域的边界、不同介质的交界处和场源处,场矢量是不连续的,那么场的导数也就失去了意义。边界条件就是定义跨越不连续边界处的电磁场的特性,因此,正确地理解、定义并设置边界条件,是正确使用HFSS仿真分析电磁场场特性的前提。 边界条件的类型: 理想导体边界(Perfect E) 电场矢量垂直于物体表面,有两种边界被自动设为理想导体边界条件: 1、任何与背景相关联的物体表面将被自动定义为理想导体边界,并命名为outer边界 2、材料设为PEC(理想电导体)的物体表面被自动定义为理想导体边界,并命名为smental 理想磁边界/自然边界(Perfect H) 电场矢量与物体表面相切,磁场矢量与物体表面垂直。 自然边界(Natural):当理想导体边界和理想磁边界出现交叠时,理想磁边界也称为自然边界 注意:在理想导体边界上叠加理想磁边界将去掉理想导体边界的特性,相当于在理想导体表面开个口,允许电场穿过。 有限导体边界(Finite Conductivity) 有耗导体/非理性导体边界条件,电场垂直于物体表面,在电磁波的传播方向上电场会愈来愈小 用户需要设置的参数:导电率和导磁率 注意:当物体的材料设置为非理想导体(如铜、铝等金属材料)时,其表面自动定义为有限导体边界条件。 辐射边界(Radiation) 用于模拟开放的自由空间,模拟波辐射到空间的无限远处的情况,常用于天线问题的分析。当结构中包含辐射边界条件时,HFSS会自动计算结构的远区场。(使用Perfect H边界条件模拟开放空间时,不会计算远区场) 辐射边界条件是自由空间的近似,这种近似的准确程度取决于波的传播方向与辐射边界之间的角度,以及辐射源与边界之间的距离。辐射边界在各个方向上距离辐射体一般不小于1/4个波长。 对称边界(Symmetry) 模拟理想电壁或理想磁壁对称面,应用对称边界可以构造结构时仅构造一部分,减小结构的尺寸和设计的复杂性,缩短计算时间。 定义对称平面时,需要遵循以下原则: 1、对称平面必须暴露在背景中 2、对称面必须定义在平面表面上,不能定义在曲面上 3、在一个问题上最多只能定义三个正交对称面 决定对称面的类型: 1、如果电场垂直于对称面且对称,使用理想电壁对称面 2、如果磁场垂直于对称面且对称,使用理想磁壁对称面 此外使用对称边界条件需要设置阻抗乘法器: 1、理想电壁对称面将结构分为两部分时,只有一半的电压值和一半的能量被计算,由Zpu=U*U/P计算出的阻抗也只有真实值的一半,所以需要定义2倍的阻抗乘法器。 2、理想磁壁对称面将结构分为两部分时,只有一半的能量被计算,而电压保持不变,由Zpu=U*U/P计算出的阻抗是真实值的2倍,所以需要定义0.5倍的阻抗乘法器。图片 图片 在这里插入图片描述 阻抗边界(Impedance) 用于模拟已知阻抗的边界表面,如薄膜电阻表面;表面的阻抗Zs=Rs+jXs。 阻抗的计算: number of "Square"=Length(in direction of current flow)/Width Impedance per Square=Desired Lumped Impedance/number of square 集总RLC边界(Lumped RLC) 类似于阻抗边界条件,利用用户提供的R、L、C值计算出对应的阻抗值 与阻抗边界不同的是,集总RLC边界不需要提供以Ohms/Square为单位的电阻和电抗,而是要给出R、L和C的真实值;之后HFSS就能确定任意频率下集总RLC边界以Ohms/Square为单位的阻抗。 分层阻抗边界条件(Layered Impedance) 分层阻抗边界条件是用多层结构将物体表面模拟为一个阻抗表面,其效果与阻抗边界条件相同; 与阻抗边界条件不同的是,对于分层阻抗边界条件,HFSS是根据输入的分层结构数据和表面粗糙度来计算表面电阻和表面电抗的。 分层边界条件不支持快速扫频。 无限地平面(Infinite Ground Plane) 在设置理想导体边界、有限导体边界或阻抗边界时有"Infinite Ground Plane"复选框。 将有限大的边界表面模拟成无限大地平面的作用,设置无限大平面边界后,在后处理中会影响近区、远区辐射场的计算。 定义无限大平面时,需要满足以下条件: 1、必须暴露在背景上 2、必须定义在平面上、 3、无限大平面和对称面的总数不超过3个 4、所有无限大地平面和对称面必须相互垂直 主从边界(Master and slave) 简称为关联边界条件LBC,主要用于模拟平面周期性结构表面,例如阵列天线。 包括主边界条件(Master)和从边界条件(Slave),总是成对出现,且主边界表面和从边界表面的形状、大小和方向完全相同,主边界表面和从边界表面上的电场存在一定的相位差,该相位差就是周期性结构相邻单元之间存在的相位差。 定义主从边界表面时,用户需要正确设置U、V坐标系,保证主从边界表面大小和方向完全一致。 理想匹配层(PML) 理想匹配层,是能够完全吸收入射电磁波的假想各项异性材料边界。理想匹配层有两种典型的应用:一是用于外场问题中的自由空间截断,二是用于导波问题中的吸收负载。 对于导波的吸收负载,理想匹配层模拟导波结构均匀地延申到无穷远处。 对于自由空间截断地情况,理想匹配层地作用类似于辐射边界条件,PML表面能够完全吸收入射过来地电磁波。和辐射边界条件相比,理想匹配层因为能够完全吸收入射的电磁波,零反射,因此计算结果更精确;同时理想匹配层表面可以距离辐射体更近(差不过十分之一个波长即可),不需要像辐射边界表面一般需要距离辐射体大约四分之一个波长。二、HFSS中的激励方式(Excitation) HFSS中,激励是一种定义在三维物体表面或者二维物体上的激励源,这种激励源可以是电磁波激励、电压源或者电流源,激励端口是一种允许能量进入或流出几何结构的特殊边界条件类型。 激励类型: 波端口(Wave Port) 默认情况下,所有三维物体和背景之间的接触面都是理想导体边界,没有能量可以进出;波端口设置在背景上,用作模型的激励源并提供一个能量进入/流出的窗口。波端口一般设置在背景平面上,不允许端口平面弯曲。 波端口模式(modes):对于给定横截面的波导或传输线,特定频率下有一系列的解满足相应的边界条件和麦克斯韦方程组,每个解都称之为一种模式,或者说一种波形。通常,模式是根据电场和磁场沿导波系统传输方向上有无分量这一情况来命名的,假设导波系统沿z轴放置,上述分量是指z向的电场分量Ez和磁场分量Hz。 对于Ez=0、Hz=0一类的模,称之为横电磁模,即TEM模; 对于Ez=0、Hz不为0一类模,称之为横电模,即TE模; 对于Ez不为0、Hz=0一类的模,称之为横磁模,即TM模。 端口校准:波端口必须被校准以确保一致的结果;校准的目的有两个,确定场的方向、设置电压的积分路径。 端口平移(Deembed):是指平移端口的位置,查看其对计算结果的影响;选中使用端口平移功能,只影响数据后处理,HFSS不会重新进行仿真计算。HFSS端口平移中正数表示参考平面向模型内部移动,负数则是向外延申。 终端线(Terminal):对于终端驱动的求解类型,终端的S参数反映的是波端口节点电压和电流的线性叠加,通过波端口处的节点电流和电压可以计算出端口的阻抗和S参数矩阵。 集总端口(Lumped Por) 集总端口激励和波端口激励是HFSS中最常用的两种激励方式。 集总端口激励类似于传统的波端口,与波端口不同的是集总端口可以设置在物体模型内部,且用户需要设定端口阻抗;集总端口直接在端口处计算S参数,设定的端口阻抗即为集总端口上S参数的参考阻抗;另外集总端口不计算端口处的传播常数,因此集总端口无法进行端口平移操作。 集总端口激励的尺寸大小要比波端口小 Floquet端口(Floquet Port) 与波端口的求解方式类似,Floquet端口求解的反射和传输系数能够以S参数的形式显示。使用Floquet端口激励并结合周期性边界,能够像传统波导端口激励一样轻松的分析周期型结构的电磁特性,从而避免了场求解器复杂的后处理过程。 入射波(Incident Wave) 是用户设置的朝某一特定方向传播的电磁波,其等相位面与传播方向垂直;入射波照射到器件表面和器件表面的夹角称为入射角。入射波激励常用于雷达反射截面(RCS)问题的计算。 需要设置的参数有:波的传播方向(Poynting Vector)、电场的强度和方向。 电压源激励(Voltage) 电压源激励定义在两层导体之间的平面上,用理想电压源来表示该平面上的电场激励。 电压源激励时需要设置的参数有:电压的幅度、相位和电场的方向。 注意:电压源激励所在的平面必须远小于工作波长,且平面上的电场是恒定电场;电压源激励是理想的源,没有内阻,因此后处理时不会输出S参数。 电流源激励(Current) 电流源激励定义于导体表面或者导体表面的缝隙上,用理想电流源来表示该平面上激励。 电流源激励需要设定的参数有:导体表面缝隙的电流幅度、相位和方向。 注意:电流源激励所在的平面/缝隙必须小于工作波长,且平面/缝隙上的电流是恒定的;电流源激励是理想的源,没有内阻,因此后处理时不会输出S参数。 磁偏置激励(Magnetic Bias) 创建一个铁氧体材料时,必须通过设置磁偏置激励来定义网格的内部偏置场;该偏置场使得铁氧体中的磁性偶极子规则排列,产生一个非零的磁矩。 如果应用的偏置场时均匀的,张量坐标系可以通过旋转全局坐标系来设置 如果应用的偏置场时非均匀的,不允许旋转全局坐标来设置张量坐标系三、求解类型和求解设置 1、HFSS中有三种求解类型:模式驱动求解(Driven Model)、终端驱动求解(Driven Terminal)和本征模求解(Eigenmode) 模式驱动求解类型:以模式为基础计算S参数,根据导波内各模式场的入射功率和反射功率来计算S参数矩阵的解。 终端驱动求解类型:以终端为基础计算导体传输线端口的S参数;此时,根据传输线终端的电压和电流来计算S参数矩阵的解。 本征模式求解类型:本征模式求解器主要用于谐振问题的设计与分析,可以用于计算谐振结构的谐振频率和谐振频率处对应的场,也可以用于计算谐振腔体的无载Q值。 应用本征模式求解时注意: 不需要设置激励方式 不能定义辐射边界条件 不能进行扫频分析 不能包含铁氧体材料 只有场解结果,没有S参数求解结果2、自适应网格剖分:在分析对象内部搜索误差最大的区域并进行网格的细化,每次网格细化过程中网格增加百分比由用户事先设置,完成一次细化过程后,重新计算并搜索误差最大的区域,然后判断误差是否满足设置的收敛条件。如果满足收敛条件,则完成网格剖分;如果不满足收敛条件,继续下一次网格细化过程,直到满足收敛条件或者达到设置的最大迭代次数为止。 3、求解频率(网格自适应剖分频率)的选择 HFSS计算时自适应网格剖分是在用户设定的单一频点上进行的,网格剖分完成后,同一个求解设置项下其他频点的求解都是基于前面设定频点上所完成的网格划分。自适应频率设置越高,网格剖分就越细,网格个数就越多,计算结果也相应地更加准确,但同时计算过程中所占用地计算机内存也就越高,计算所花费地时间也越长。 下面给出几个常用问题类别的自适应频率的选择: 点频或窄带问题:对于点频或者窄带问题,自适应网格剖分直接选择工作频率。 宽带问题:对于宽带问题,应该选择最高频率作为自适应网格剖分频率。 滤波器问题:对于滤波器问题,由于阻带内电场只存在于断口处,所以自适应频率选择在通带内的高频段。 快速扫频问题:对于快速扫频问题,典型的做法就是选择中心频率作为自适应频率。 高速数字信号:对于高速数字信号完整性分析问题,需要借助转折频率(Knee Frequency)来决定自适应网格剖分频率 4、扫频分析 离散扫频(Discrete):是在频带内的指定频点处计算S参数和场解。例如,指定频带范围为1~2GHz、步长为0.25GHz,则会计算在1GHz、1.25GHz、1.5GHz、1.75GHz、2GHz频点处的S参数和场解。默认情况下,使用离散扫频只保存最后计算频率点的场解。如果希望保存指定的所有频率点的场解,需要选中设置对话框中Save Fields复选框。 快速扫频(Fast):采用ALPS算法,在很宽的频带范围内搜寻处传输函数的全部零、极点。快速扫频适用于谐振问题和高Q值问题的分析,可以得到场在谐振点附近行为的精确描述。使用快速扫频,一般选择频带中心频率作为自适应网格剖分频率进行网格剖分,计算出该频点的S参数和场分布,然后使用基于ALPS算法的求解器从中心频率处的S参数解和场解来外推整个频带范围的S参数和场解。使用快速扫频,计算时只会求解中心频点处的场解,但在数据后处理时整个扫频范围内的任意频点的场都可以显示。 插值扫频(Interpolating):插值扫频使用二分法来计算整个频段内的S参数和场解。使用插值扫频,HFSS自适应选择场解的频率点,并计算相邻两个频点之间的解的误差,找出最大误差,当两点之间的最大误差达到指定的误差收敛标准或者达到了设定的最大频点数目后,扫描完成;其他频率点上的S参数和场解由内插给出。 四、HFSS中的变量和Optimetrics模块的使用 HFSS不仅能够提供常规的电磁分析,还能够提供优化分析、参数扫描分析、灵敏度分析和统计分析等功能。这些功能都集中在HFSS中的Optimetrics模块中。要使用Optimetrics模块的这些分析和设计功能。首先需要定义和添加相关变量。 1、HFSS中变量的定义和使用 (1)HFSS中有两种类型的变量:工程变量(Project Variables)和设计变量/本地变量(Local Variables) 工程变量和设计变量的区别: 工程变量前面有一个"$"前缀,以和本地变量区分 工程变量作用区间是整个Project,本地变量作用区间是所在的Design 物体模型尺寸、物体的材料属性(工程变量)等都可以使用变量来表示。 (2)变量的定义 变量名:可以由数字、字母或下划线组成。每个变量在定义时都必须赋一个初始值,变量值可以是数值、数学表达式或者数学函数,也可以是数组、矩阵或者行列式。 添加/删除变量:工程变量和设计变量操作不同 添加和删除工程变量:Project > Project Variables 或者 [Project Tree] Project > Project Variables 打开 Project Properties 对话框 添加和删除设计变量:HFSS > Design Properties 或者 [Project Tree] Design > Design Properties 打开 Design Properties 对话框 在设计过程中,也可以直接输入未定义的变量代替设计参数,输入未定义的变量后,HFSS会自动弹出添加变量的对话框 2、Optimetrics模块的功能介绍 Optimetrics是集成在HFSS中的优化设计模块,该模块通过自动分析设计参数的变化对求解结果的影响,HFSS中Optimetrics模块能够提供如下分析设计功能: 参数扫描分析(Parametric) 参数扫描分析功能可以用来分析物体的性能随着指定变量的变化而变化的关系,在优化设计之前一般使用参数扫描分析功能来确定被优化变量的合理变化区间 参数扫描分析步骤: 首先需要定义变量并添加求解设置项 HFSS > Optimetrices > Add Parametric...弹出 Setup Sweep Analysis 对话框,添加扫描变量 或选中Project Manager 中的 Optimetrics,单击右键 Add > Parametric,弹出 Setup Sweep Analysis 对话框,添加扫描变量 设置好扫面变量后,点击”Analyze“就可以进行参数扫描分析 查看分析结果 优化设计(Optimization) 优化设计是HFSS软件结合Optimetrics模块根据特定的优化算法在所有可能的设计变化中寻找出一个满足设计要求的值的过程 优化设计的过程: 首先需要明确设计要求或设计目标 然后用户根据设计要求创建初始结构模型(Nominal Design)、定义设计变量并构造目标函数 最后指定优化算法进行优化。 图片 图片 在这里插入图片描述 调谐分析(Tuning) 调谐分析功能是改变变量值的同时实时显示对求解结果的影响程度 HFSS中的调谐分析功能是用户在手动改变变量值得同时能实时显示求解结果 图片 图片 在这里插入图片描述 灵敏度分析(Sensitivity) 灵敏度定义为电磁特性/求解结果的变化与电路参数的变化的比值,使用HFSS进行电磁分析时S参数是很常用的一个分析结果。灵敏度分析功能是用来分析设计参数的微小变化对求解结果的影响程度 统计分析(Statistical) 统计分析功能是利用统计学的观点来研究设计参数容差对求解结果的影响,常用的方法是蒙特卡洛法 图片 图片 在这里插入图片描述 五、HFSS的数据后处理 使用HFSS进行电磁问题的求解分析过程中以及完成求解分析之后,利用数据后处理功能能够直观地给出问题地各种求解信息和求解结果。 1、求解信息数据(Solution Data) HFSS > Results > Solution Data 命令,或者右键单机工程树Results节点,从弹出菜单中选择Solution Data命令,可以打开求解信息对话框,显示各种求解信息。 2、Results数值结果 (1)显示方式 HFSS后处理模块能够以多种方式来显示分析数值结果,这些数值结果地显示方式包括:(右击Results > Create Model Solution Data Report) Rectangular Plot:直角坐标图形显示 Rectangular Stacked Plot Polar Plot:极坐标图像显示 Data Table:数据列表显示 Smith Chart: 史密斯圆图显示 3D Rectangular Plot:三维直角坐标 3D Polar Plot:三维球坐标图形显示 Radiation Pattern:辐射方向图 (2)参数类型 模式驱动求解: Output Variables:用户自定义的输出变量 S Parameter:散射参数 Y Parameter:导纳参数 Z Parameter:阻抗参数 VSWR:电压驻波比 Gamma:传播常数 Port Zo:端口特征阻抗 Active S Parameter Active Y Parameter Active Z Parameter Active VSWR 终端驱动求解: Output Variables:用户自定义的输出变量 S Parameter:散射参数 Y Parameter:导纳参数 Z Parameter:阻抗参数 VSWR:电压驻波比 Power:功率 Voltage Transform matrix:电压传输矩阵 Terminal Port Zo:端口特征阻抗 Active S Parameter Active Y Parameter Active Z Parameter Active VSWR (3)输出变量 右键单击工程树下的Result节点,从弹出菜单中选择Output Variables命令,便可打开输出变量的定义对话框 3、Field Overlays场分布图 在HFSS求解完成之后可以通过右击 Field Overlays 来查看电场、磁场、电流密度、坡印廷矢量等场分布图。 (1)电场E Mag_E:电场幅度瞬时值 ComplexMag_E:电场幅度有效值 Vector_E:电场矢量 (2)磁场H Mag_H:磁场幅度瞬时值 ComplexMag_H:磁场幅度有效值 Vector_H:磁场矢量 (3)电流密度J Mag_Jvol:体电流密度瞬时值 ComplexMag_Jvol:体电流密度有效值 Vector_Jvol:体电流密度矢量 Mag_Jsurf:面电流密度瞬时值 ComplexMag_Jsurf:面电流密度有效值 Vector_Jsurf:面电流密度矢量 (4)其他 Vector_RealPoynting:坡印廷矢量 Local\_SAR和Average\_SAR:局部SAR值和平均SAR值 六、天线问题的数据后处理 1、天线方向图 创建天线的方向图:Results > Create Model Solution Data Report > 3D Polar Plot 天线的辐射场在固定距离上随球坐标系的角坐标 θ 、φ 分布的图形被称为辐射方向图,简称方向图。方向图通常在远区场确定。用辐射场强表示的方向图称为场强方向图,用辐射功率密度表示的方向图称为功率方向图。 2、天线性能参数 右击Radiation,创建好查看天线性能参数:右击天线辐射方向图 > Compute Antenna Parameters Incident Power:输入功率 HFSS中输入功率是指定义的端口激励功率 Acceptable Power:净输入功率 净输入功率是指世纪流入天线端口的输入功率,如果分别使用 Pacc 和 Pinc 表示净输入功率和输入功率,对于只有一个传输模式的单端口天线,有: 图片 Radiated Power:辐射功率 辐射功率是指经由天线辐射到自由空间里的电磁能量,天线的辐射功率可以用坡印廷矢量的曲面积分来计算: 图片 Radiation Efficiency:辐射效率 辐射效率是辐射功率和净输入功率的比值 图片 Max U:最大辐射强度 辐射强度U是指每单位立体角内天线辐射出的功率,Max U是辐射强度的最大值 图片 η 自由空间中的波阻抗为 377Ω,r 为远区场点与天线之间的距离 Peak Directivity:方向性系数 天线的方向性系数是指在相同的辐射功率和相同的距离的情况下,天线在最大辐射方向上的辐射功率密度与无方向性天线在该方向上的辐射功率密度的比值图片 Peak Gain:天线增益 天线增益是指在相同的净输入功率和相同距离的情况下,天线在最大辐射方向上的辐射功率密度与无方向性天线在该方向上的辐射功率密度的比值图片 Peak Realized Gain:最大实际增益 天线的最大实际增益是指在相同的输入功率和相同距离的情况下,天线在最大辐射方向上的辐射功率密度与无方向性天线在该方向上的辐射功率密度的比值 Front to back Ration:前后向比 又称为轴比(Axis Ratio),指方向图中前后瓣的最大比值,代表天线的极化程度 3、天线阵的处理 由相同的天线单元构成的天线阵的方向图等于单个天线单元的方向图与阵因子的乘积。其中,阵因子取决于天线单元之间的振幅、相位差和相对位置,与天线的类型、尺寸无关。在HFSS中,可以定义天线阵元排列结构和激励方式,然后通过仿真分析分析单个天线单元的方向图等天线参数和阵因子来仿真分析整个天线阵列的方向图等天线参数。HFSS支持两种天线阵列类型:规则排列的均匀天线阵列(Regular Uniform Array)和用户自定义排列(Custom Array)。 其中用户自定义阵列:允许用户使用文本文件自定义阵因子信息,然后导入到HFSS软件中,HFSS计算得到阵因子。用户自定义阵列允许更大的灵活性,可以构造天线阵元在空间任意分布的天线阵列。
通信&信息处理
# 天线设计
刘航宇
3年前
0
5,123
2
2023-03-08
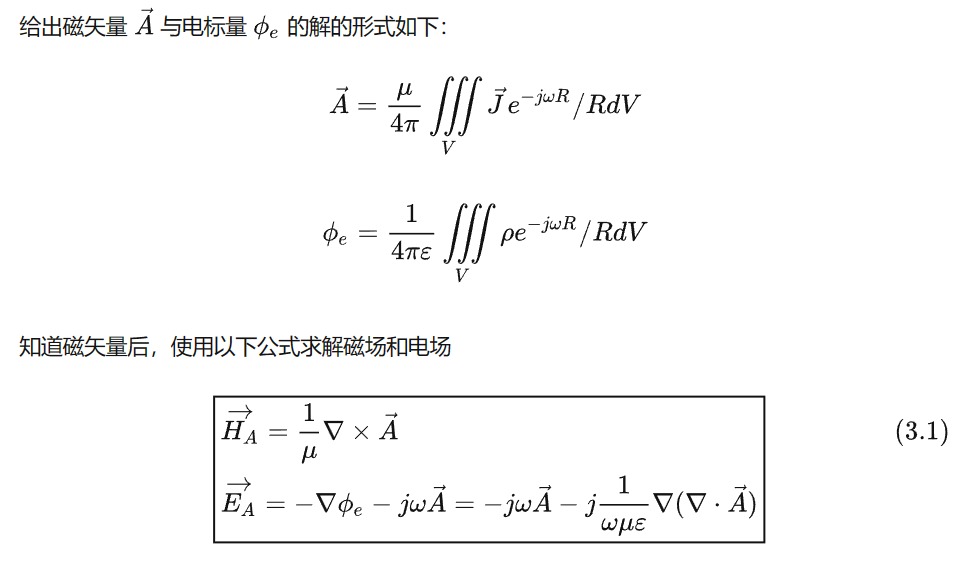
天线设计2-电磁学基础与线形天线
第三章 辐射积分与辅助函数 求解辐射场的分析中,通常需要构造辅助函数来帮助求解。常见的辅助位函数为,磁矢量A- (也称为磁矢位)。 图片 远场辐射 很多天线的辐射场使用球面坐标来表示会较为方便,其一般形式是 图片 重要公式 图片 线形天线 Linear Wire Antenna 线形天线是最古老、最便宜、最简单、应用最广泛的天线。因此我们尝试从最小的天线结构和最简单的几何形状开始分析。我们以极小偶极子的辐射场特性为例,讲解辐射场的一般求解过程。 极小偶极子 Infinitesimal Dipole 极小偶极子对应于导线很短,很细,电流近似均匀分布的情况。 图片 图片 求解辐射场 图片 图片 这样我们就得到了极小偶极子的辐射电场和磁场。以上的分析在源以外的区域都是有效的。 功率密度和辐射电阻 利用前面计算的结果和坡印廷矢量的计算公式 图片 辐射场分布 前面所推导的极小偶极子的电磁场的分布 在源以外的区域都是适用的,但在不同的区域,场的一些特性可能有所区别。 近场 kr <<1 图片 中场 kr>1 图片 远场 kr>>1 在远场时,径向的电场几乎为0。能流密度垂直于径向,以辐射波为主。 从近场到远场的过渡动画: 动画 方向性 图片 一般远场辐射特性的求解过程 前面我们以极小偶极子为例,求解了极小偶极子的辐射特性。一般远场辐射特性的计算过程如下: 指定电流或者磁流密度 确定辅助场A 确定远场的E和H 计算(a)能流密度或(b)辐射强度 计算辐射功率 计算极化 计算归一化的功率图 计算辐射电阻和输入电阻 图片 有限长度偶极子 极小偶极子是一种将电流分割成无数小电流源的近似,实际情况中,需要求解的往往是有限长度的偶极子。我们假设电流在导线上的分布是正弦形式的,电流密度可以写成: 图片 图片 图片 图片 辐射电阻 根据前面辐射功率和辐射电阻的关系,可以得到 图片 图片 辐射电抗 图片 输入电阻 输入端看到的电阻与天线的辐射电阻未必是相同的。因为导线上的电流分布发生了变化。 图片 半波偶极子 图片 辐射阻抗 辐射电阻: 图片 图片
通信&信息处理
# 天线设计
刘航宇
3年前
0
1,179
2
天线设计-微带天线小型化技术
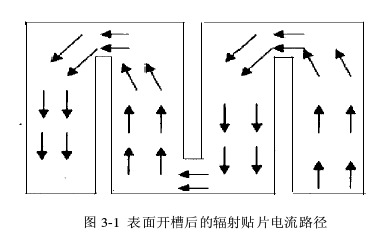
天线作为无线电通信的桥梁,是实现无线通信的关键。随着无线通信技术和电子技术的发展,日常生活中的无线电子产品变得越来越小,越来越薄,越来越轻,而功能变得越来越强大。天线的小型化跟不上电子设备小型化的步伐,经常成为无线电子产品体积缩小的瓶颈。理论上讲,天线的工作波长与天线尺寸成正比。换句话说,要想降低天线的工作频率就要增大天线的尺寸,这就使得天线的小型化成为了研究的难点,实现微带天线小型化设计的主要手段有: 1)提高介质基板的介电常数; 2)曲流技术; 3)短路加载技术; 4)附加有源网络; 5)应用用电磁带隙结构; 6)应用左手介质; 目录 1、提高介质基板的介电常数 曲流技术贴片表面开槽 接地板开槽 短路加载技术 附加有源网络 应用用电磁带隙结构 应用左手介质 1、提高介质基板的介电常数 图片 图片 曲流技术 我们知道增加天线的有效长度可以降低天线的谐振频率。曲流技术就是我们常说的表面开槽技术,它的实质就是增加了天线的有效长度,从而达到天线小型化的目的。 贴片表面开槽 图片 图(3-1)为表面开槽后的辐射贴片电流路径分布。从图中我们可以看出辐射贴片的电流路径在开槽处发生弯曲,有效地延长了电流路径,相当于天线的有效长度变大了。从而在不改变天线几何尺寸的情况下,降低了天线的谐振频率。 微带天线的辐射贴片表面上,各个共振模式的电流分布均不相同。如果在相同的共振模式下开槽,就会改变原有的共振模式的电流路径,延长电流路径,使得天线的共振波长变大。所所开凹槽的长度会影响天线的谐振频率,凹槽越长则天线的谐振频率越低。不过,所开凹槽的宽度不宜过大,太大会降低天线的辐射性能。 跟采用高介质常数基底的方法一样,辐射贴片表面开槽也有其弊端。表面开槽后天线会.产生垂直于主激发面的额外电流,从而增加了天线的交叉极化,使得天线的辐射效率降低。除此之外,开槽后天线的相对辐射面积就减小了,从而影响到天线的增益。 接地板开槽 图片 图片 短路加载技术 基本的矩形微带天线的为工作波长的二分之一,基本谐振模式为TM。,其电流在两个开路端之间成驻波分布。所以在两个开路端之间有--条零电位线。如果我们在此零电位线处让其接地,将微带天线的另一半舍去,就可以在开路和短路之间形成驻波分布,而不改变天线的内部场分布。这样一来天线的尺寸就减小 了一半,实现了天线小型化的目的。短路加载微带天线的方法有很多,包括短路面加载,短路片加载和短路探针加载。短路加载的数量,每个短路加载的面积以及天线的高度决定了短路加载的效果。图(3-3)分别给出了不同加载方式的示意图。 图片 图片 图(3-3a)是短路面加载的微带天线,它的尺寸缩小到了四分之一工作波长。所以此微带天线的尺寸比半波结构的微带天线尺寸减小了一-般。图(3-3a)所示的短路片加载微带天线和图(3-3b)所示的短路探针微带天线的结构比较相似,但实际上它们加载的结构带宽不一样。 附加有源网络 由于天线的辐射电阻会随着天线尺寸的减小而减小,所以天线尺寸的减小会降低天线的效率。除此之外,天线的带宽也常常因为天线尺寸的减小而降低。而天线性能的恶化会影响整个无线收发系统的性能,甚至使系统无法正常工作。 有源网络的放大作用和阻抗补偿技术可以用来弥补由天线尺寸减小而引起的天线性能下降的问题 有源天线具有以下优点: 1)频带宽; 2)高增益; 3)容易实现阻抗匹配;. 但是有源网络会影响天线的互易性。 应用用电磁带隙结构 电磁带隙结构(Electromagnetic B and-Gap)是周期结构的统称,包括光子带隙(Photonic Band Gap, PB)、频率选择表面(Frequency Select Surface, FS)以 及光子晶体(photonic Crystal,PC)等周期结构。电磁波与周期结构互相作用的时候,会出现--些如频率禁带、通带以及频率间隙等特性。 电磁带隙结构是微带辐射贴片的下方及周围、天线的基片内钻出或刻蚀出一系列间隔非常近的小孔(≤h/10),通过改变孔间距和孔的大小来改变有效介电常数。EBG 是人造的周期性结构,在此种结构中,一-定范围内的电磁波无法传播。将电磁带隙结构附加在天线辐射贴片的背面,可以抑制天线的表面波,从而实现天线小型化的目的。 目前,比较常见的电磁带隙结构有: 1)基底打孔型; 2)高阻抗表面型; 3)地面腐蚀型; 4)夹层式结构; 5)共面紧凑型; 应用左手介质 图片 图片 图片 如图(3-5)所示,将左手介质和右手介质相叠加,当电磁波在当中传播时,由于介质两边相位相反,左手介质会对右手介质进行相位补偿,相位变化会完全抵消。这样,由辐射贴片、右手介质、左手介质以及接地板所组成的微带天线的谐振方程不再依赖于d,和d,而只取决于d2/d,.由于传统的谐振腔谐振至少需要半个波长,而这种结构就突破了这个限制,从而很好地降低了天线的高度,实现了微带天线小型化的目的。
通信&信息处理
# 天线设计
刘航宇
3年前
0
3,504
7
2023-03-04
AMBA--AHB总线协议介绍(二)
1、突发提前终止 在特定情况下,一个突发传输会被提前终止,此时,要求从机能根据突发信息采取正确的动作。从机能够通过监控HTRANS信号一个突发传输是否被提前终止。在突发传输开始后,从机每次传输都会监测HTRANS信号是否为SEQ或BUSY,当HTRANS信号上出现NONSEQ或者IDLE时,则表明前一次突发传输已经终止。 当一个主机因为仲裁失败导致突发传输未能完成,则在该主机下一次获得总线所有权时,必须能够保证重建该突发完成剩余传输。例如,当主机只完成一个4拍突发传输的一拍,那么它必须使用一个未定长度的突发来完成剩下的三拍传输。 下图表示了一个四拍的回环突发操作,从机在第一次传输插入了一个等待状态,该突发传输大小为4Byte,为4拍传输,所以地址将在16字节边界回环,因此传输到0x3C后,下一次的传输地址将返回到0x30: 图片 下图表示了一个4拍增量突发,在第一次传输时从机也插入了一个等待状态,地址是连续的,跨过了16字节地址地址边界: 图片 下图表示了一个8拍的回环突发传输,传输大小为4Byte,所以地址将在32字节边界回环,回环之后的地址为0x20: 图片 下图表示8拍增量突发,传输大小为2Byte,所以地址增量为2,同时传输会跨过16字节的地址边界: 图片 下图表示了未定义长度的突发传输,从图中可以看出,该图包含两个未定义长度的突发传输,第一个位起始地址为0x20,传输大小为2Byte;第二个突发起始地址为0x5C,传输大小为4Byte,地址增量为4: 图片 2、控制信号 和传输类型可突发类型信号一样,每次传输都会有一组控制信号来提供传输的附加信息。这些控制信号和地址总线具有相同的时序,和地址信号不同的是,这些控制信号在突发传输的过程中,必须保持不变。 2.1 传输方向 HWRITE为高时,表示写传输,并且主机需要数据广播到写数据总线(HWDATA)上;该信号为低时,表示读传输,从机必须产生数据到读数据总线(HRDATA)。 2.1 传输大小 HSIZE[2:0]表示传输大小,见下表: 图片 注:传输大小和传输类型一起被用于计算回环突发传输的地址边界。 2.3 保护控制 HPROT[3:0]为总线协议保护信号,用于定义存取的型态与特性,表示传输是否是: 一次预取址或者数据访问; 特权模式访问或者用户模式访问; 对于带有存储器管理单元的主机来说这些信号也表示当前访问是带高速缓存(cache)的或是带缓冲(buffer)的; HPROT[3]高速缓存HPROT[2]带缓冲的HPROT[1]特权模式HPROT[0]数据/预取指描述---0预取指---1数据访问--0-用户模式访问--1-特权模式访问-0--无缓冲-1--带缓冲0---无高速缓存1---带高速缓存注意:并非所有的主机都能产生正确的保护控制信号,因此建议从机没有严格必要的情况下,不要使用HPROT信号。 3、地址译码 AHB总线中,会使用一个中央译码器来产生HSELx信号,用于选择从机,选择信号由地址高位信号组合译码产生。建议使用简单的译码方案来保证高速操作。 从机只能在HREADY信号为高时,采样地址和控制信号以及HSELx,当HREADY信号为高时,表示传输完成。 AHB有几个特别的规定: (1)每个从机至少都有 1KB 的内存空间。 (2)每个主机每次存取的空间不可超过 1KB。 (3)如果在 NONSEQ 或 SEQ 型态下存取到不存在的地址时,会有一个预设的从机发出 ERROR 的响 应信号。 (4)如果在 IDLE 或 BUSY 型态下存取到不存在的地址时,会有 OKAY 的响应信号。 (5)预设的从机是中央译码器的一部分。 (6)根据系统设计,使用地址的高位来产生从机选择信号。 (7)地址的低位送给从机以寻址其的内部存储器或缓存器 图片 4、从机传输响应 主机发起传输后,由从机决定传输如何进行。一旦传输发起,协议不允许主机取消传输。 被访问的从机必须提供一个传输状态的响应。从机使用HREADY信号和HRESP[1:0]信号的组合,来提供传输状态。 从机可以提供多种方式来完成传输: (1)立刻完成传输; (2)插入一个或多个等待状态以获得充分时间来完成传输; (3)发出一个错误应答表示传输失败; (4)延时传输的完成,允许主机和从机放弃总线,让其他主机先完成传输,再完成剩下的传输。 4.1 传输完成 HREADY信号用于扩展AHB传输中的数据相位,HREADY为低表示传输被扩展,为高表示传输完成。 注意:每个从必须预先设定它放弃总线之前能插入的最大等待周期,用来计算访问总线的延时。推荐但不 必须的是, 等待状态最多只可使用 16 个周期,已防止任何访问长时间占用总线。 从机需要 HREADY 是双向信号(HREADY 做为总线上的信号,它是主机和从机的输入;同时每个从机自己的 HREADY 信号是输出。所以对于从机会有两个 HREADY 信号,一个来自总线的输入,一个自己给到多路器的输出。 4.2 传输响应 HRESP[1:0]的编码及传输响应信号如下表: HRESP[1:0]ReponseDescription00OKAY从机可以用HREADY (拉高)与OKAY 的信号响应,代表传送已成功完成。HREADY 被拉低,加上OKAY的信号可插入在任何的响应信号(ERROR、 RETRY 或SPLIT) 之间,也就是当从机在未能正确的选择ERROR、RETRY 或SPLIT时,可以插入HREADY (拉低)与OKAY信号,但是等待状态最多只可使用16个周期01ERROR此次数据传送发生错误,该信号必须维持两个时钟周期10RETRY传输未完成,主机应尝试再次发起传输,直到传输完毕,该信号必须维持两个时钟周期11SPLIT此信号必须维持两个周期,从机响应此信号表示此次的传送无法完成,要以分段传送方式来达成。等到从机可以完成时,会知会仲裁器,让重提数据传送要求的主机,完成传送4.3 双周期响应 仅有OKAY响应可以在单周期给出,ERROR、RETRY、SPLIT响应至少需要两个周期。为了完成这些响应,从机会在倒数第二个周期驱动HRESP为ERROR或RETRY或SPLIT,同时拉低HREADY以获得一个额外的扩展周期。在最后一个周期,HREADY拉高,表示传输完成,同时保持HRESP。 如果从机需要两个以上的周期来完成ERROR、RETRY、SPLIT响应,则从机可能在传输开始时,插入等待状态。在这段周期内,从机拉低HREADY,同时只能给出OKAY响应。 需要双周期响应是AHB流水线传输的本质决定的,当从机发起ERROR、RETRY、SPLIT响应时,下一次传输的地址已经被广播到地址总线上了,双周期响应允许主机有足够的时间来取消该地址,并在下一次传输开始之前驱动HTRANS为IDLE。 下图表示了一个RETRY应答,从图中可知,传输的起始地址为A,传输大小为4Byte,主机在获得响应之前,已经将地址设置为A+4,从机在地址A不能立即完成传输,因此给出RETRY响应,这个响应指示主机地址A的传输未完成,并且地址A+4的传输被IDLE传输类型取代。 图片 下图表示了传输中,从机需要一个周期(HRESP为OKAY)来决定给出何种响应的例子,之后从机给出双周期的ERROR响应结束了传输。 图片 4.4 错误响应 当主机收到一个 ERROR响应时,它可以选择结束当前的批量数据传送,也可以继续传送剩下的批量数据,但通常不这样做。在从机送出 ERROR的信号之前必须先送出OKEY + HREADY (LOW)的信号,而 ERROR 信号至少需要维持两个周期。如上图所示。 (1)在第二个周期 S 送出 OKAY+ low HREADY 信号,使从机有充分的时间决定是否需要发出 ERROR 的信号; (2)主机收到ERROR应答后,立刻结束当前的数据传送; 注意:从机必须维持ERROR至少两个周期 4.5 分块和重试 分块和重试响应给从机提供了在无法立刻给传输提供数据时释放总线的机制。这两种响应都允许在总线上结束传输,因此允许更高优先级的主机获得总线访问权。 SPLIT和RETRY的不同之处在于仲裁器在发生SPLIT和RETRY后分配总线的方式: (1)对RETRY而言,仲裁器将继续使用常规优先级方案,因此只有拥有更高优先级的主机能获得总线访问权; (2)对SPLIT而言,仲裁器将调整优先级方案,以便其他任何主机申请总线即能获取总线,即使这个主机拥有更低的优先级。为了完成SPLIT传输,从机必须通知仲裁器数据何时可用,以便相应主机完成传输。 SPLIT传输机制增加了仲裁器和从机的复杂度,却拥有完全释放总线给其他主机使用的有点;RETRY相应就只允许更高优先级的主机使用总线。 主机使用相同的方式处理SPLIT和RETRY相应。主机应继续请求总线,并尝试传输,知道传输完成或收到ERROR相应为止。 5、数据总线 为了避免使用三态数据总线,AHB协议将数据总线分开为读数据总线和写数据总线。最小的数据位宽为32位,且位宽可增加。 5.1 写数据总线HWDATA[31:0] 1、写出数据由主机发出; 2、主机必须将数据总线上的数据维持住,直到从机完成数据的接收 (HREADY HIGH); 3、所有传送所对应的地址都必须对齐,例如: 32 位的传送地址 Addr[1:0] = 00; 4、大端摆放法(big endian)或小端摆放法(little endian)都可使用 4.11小端摆放法(以 32 位为例) (1)低字节在 HWDATA.的低字节地址 (2)Byte 0 (address offset = 0) 在 HWDATA[7:0] (3)Byte 1 (address offset = 1) 在 HWDATA[15:8] (4)Byte 2 (address offset = 2) 在 HWDATA[23:16] (5)Byte 3 (address offset = 3) 在 HWDATA[31:24] 4.12大端摆放法 (1)低字节在 HWDATA.的高字节地址 (2)Byte 0 (address offset = 0) 在 HWDATA[31:24] (3)Byte 1 (address offset = 1) 在 HWDATA[23:16] (4)Byte 2 (address offset = 2) 在 HWDATA[15:8] (5)Byte 3 (address offset = 3) 在 HWDATA[7:0] 5.2 读数据总线HRDATA[31:0] 读数据总线在读数据期间,由被选中的从机驱动,如果从机通过拉低HREADY信号来扩展传输,则从机只需在最后一个周期提供有效数据,由HREADY信号为高表示。 端结构与写数据总线相同。 从机只需要在OKAY响应周期提供有效数据,SPLIT、RETRY以及ERROR响应不需要提供有效的读数据。 6、总线仲裁机制 仲裁机制确保了任何时刻只有一个主机可以访问总线。仲裁器的功能如下: (1)通过观察不同的总线请求信号,通过仲裁算法来决定哪个主机拥有最高优先级; (2)接收从机的完成分段传送的请求 仲裁信号描述如下表所示: NameWidthDescriptionHBUSREQx1bit由主机到仲裁器,主机通过此信号对仲裁器提出使用总线的要求。主机可在任何时间要求仲裁器对于固定长度的传送,只要发起一次请求即可, 仲裁器会依据HBURST[2:0]来判断传送的长度。对于未定的传送长度,主机必须持续提出请求,直到完成全部的传送为止。当所有主机都不需要使用总线时,必须在HTRANS.上送出IDLE信号,仲裁器就会将总线的使用权交给预设主机(default M)HLOCKx1bit此信号必须与HBUSREQx配合,表示一个不可分段的传送动作,HLOCKx必须再指定地址之前使能一个周期HGRANTx1bit由仲裁器输出到主机,仲裁器通知某个主机表示此主机得到总线的使用权.主机在HGRANT信号为高且HREADY信号也为高的那个HCLK上升沿处获得总线使用权 HMASTER4bit仲裁器以此信号表示当前是哪一个主机在使用总线,此信号也可用来控制地址多任务器HMASTERLOCK1bit仲裁器以此信号表示当前的总线是被锁住的,此信号与地址和控制信号具有相同的时序HSPLIT16bit一个可执行分段传送的从机以此信号让仲裁器知道要让哪一个主机完成其未完成的分段传送6.1 总线访问请求 主机可以在任何周期内使用HBUSREQx信号来请求总线。仲裁器会在时钟上升沿根据内部的优先级仲裁算法决定接下来哪一个主机将获得总线访问权。 通常仲裁器会在一个突发传输完成后才会授权另一个主机,但是如果需要的话,仲裁器也可以提前终止突发,将总线访问权授予更高优先级的主机。 如果一个主机需要锁定总线,那么它必须声明HLOCKx信号,告知仲裁器其他主机不应该被授予总线。 当主得到总线授权,并且正在执行一个定长的突发传输,它不需要继续总线请求即可完成这个 burst。仲裁器观察 突发的进程,并使用 HBURST[2:0]来决定主机有多少个传送。如果主机希望在当前正在进行的突发之后继续 1 次传输,它应在当前突发期间重新声明请求信号。 如果主机在突发传输过程中失去了总线访问权,那么它必须重新声明HBUSREQx信号以获得重新授权。 对于未定长度的突发,主机需持续声明HBUSREQx,知道最后一个传输已经开始。因为在未定长度的突发中,仲裁器不知道何时可以改变总线授权。 主机没有请求,也可能获得了总线控制权。这是因为当没有主机去请求总线时,总线会授权给一个默认的主机。 所以当某个主机不需要总线访问,它需要把传送类型 HTRANS 设置为 IDLE,这点很重要。 6.2 授予总线访问 仲裁器通过声明HGRANTx信号来表示当前拥有最高优先级的主机,HREADY信号为高时,主机将被授予总线,同时仲裁器改变HMASTER[3:0]来表示主机序号。 下图表示一个零等待的总线授予访问: 图片 下图表示了有等待状态总线授予访问: 图片 数据总线的拥有权必须比地址总线的拥有权晚释放出去, 这是因为数据周期发生在地址周期之后。 (1)在 T5 正沿,从机送出 HREADY 信号,表示 M1成功传送最后一次传输的地址及控制信号 (2)地址总线在 T5 正沿开始交换使用者,当 HGRANT_M2 AND HREADY = HIGH,表示地址总线交换成功 (3)仲裁器必须知道 M1还有多少笔数据要传送,才可正确的发出 HGRANT_M2 信号 (4)当仲裁器收到最后一个传输地址后,仲裁器就会改变 HGRANTx 信号 (5)T5 刚开始时, M2 送出地址与控制信号 (6)数据总线的交换只有在上一笔数据传送结束后才会开始 (7)在 T7 正沿,开始数据总线的交换 图片 下图表示了仲裁器在一次突发结束后移交总线的例子: (1)仲裁器在倒数第二个地址被采样时(T5),改变HGRANTx信号; (2)新的HGRANTx信息将在最后一个地址被采样时(T7)同时被采样。 图片 下图表示了HGRANTx和HMASTER信号在系统中是如何被使用的: !注意:由于使用了中央地址译码器,每个主机可以立刻输出它想被执行的地址,而不用等到被授予总线。HGRANTx信号仅被主机用来决定它何时拥有总线,并考虑何时地址被选中的从机采样。HMASTER的延迟信号被用来控制写数据总线数据选择器。 6.3 锁定传输 仲裁必须从观察每一个主机的 HLOCKx 信号, 来决定什么时候主机希望执行一个锁定顺序传输。之后仲裁器负责确保没有其他主机被授权,直到这个锁定传输完成。 在一个连续锁定传输之后,仲裁将总是还会保持当前的主机的授权来传一个附加的传送来保证锁定传输的序列的最后一个传送已经成功完成,并且没有收到 SPLIT or RETRY 的应答之一。 所以推荐但并不是强制要求的做法是,主机在任何锁定传输后插入一个 IDLE 传输,在开始其它突传输之前,来提供一个仲裁切换的机会。 仲裁器也负责声明HMASTERLOCK信号,该信号与地址和控制信号具有相同的时序。该信号指示从机当前传输时锁定的,因此必须在其他主机被授予总线之前处理完成。 6.4 默认总线主机 每个系统都必须包含一个默认总线主机,当其他主机都不能使用总线时,该主机被授予总线。默认主机在获得授予总线时,只能执行IDLE传输。 如果所有主机都还在等待 SPLIT传输的完成,也会将总线使用权交给默认主机。 7、分段传输 从机可以用 SPLIT 来解决延迟太长的传输。 仲裁器必须观察响应信号并且遮掉(mask)已被分段传送的主机,使其等候 HSPLIT 信号的通知后才授予其总线使用权。 仲裁器必须在 HMASTER[3:0] 上产生一个标签表示哪一个主机正在执行数据传送。 当从机要执行分段传输的动作时,这个从机必须存下主机序号。 当从机可以完成被分段的传输时会在 HSPLITx[15:0]信号上,送出要完成传送的主机序号。 仲裁器以 HSPLITx[15:0] 来决定哪一个主机 可以重新获得 bus 的使用权。 仲裁器会在每个周期去观察 HSPLITx 信号。 当有多个 HSPLITx 信号时,会被逻辑或在一起传送给仲裁器。 7.1 分段传输顺序 1、主机送出地址与控制信号,开始传送。 2、被寻址到的从机立即提供数据,或者送出SPLIT应答信号(如果需要等些周期来获得数据)。在每次的传输,仲裁器会广播出当前是哪一个主机在使用总线。 从机需要记录主机序列号,以便后面重传使用。 3、有 SPLIT 信号响应时,仲裁器会将总线使用权交给别的主机使用,如果所有其它主机都收到SPLIT 信号,则移交给默认主机。 4、当从机要完成分段传送时, 从机会在 HSPLITx 上设定对应的主机 ID,来指示哪个主机可以被允许再次访问总线。 5、仲裁器会在每个周期观察 HSPLITx 信号,如果有变化,就更改正确的主机的优先权。 6、仲裁器将会允许重新要求使用权的主机,但如果有更高优先级的主机在用总线,可能会延迟。 7、从机会响应 OKAY 信号表示传送完成。 7.2 多重分段传输 只要一个主机有额外的 HBUSREQ 与 HGRANT 线, 即可发出超过一个以上的传送要求。 仲裁器将一组信号 (REQ and GNT) 视为一个主机。 可分段传输的从机可被设计去处理额外的传送要求而不需纪录额外的地址与控制信号,但要记录主机序号。 从机可利用 HSPLITx 来表示当前正在处理的是哪一个主机要完成分段传输。 仲裁器可重新仲裁这些主机的请求,高优先权的主机可被重新给予使用权。 7.3 预防死锁 Deadlock可能发生在很多不同的主机对同一个发出 SPLIT 和 RETRY 的从机身上, 而该从机又无法处理那么多 SPLIT and RETRY 时,便会发生 deadlock。 Deadlock 可以透过限制分段传送的数目(最多 16 个)来避免。 从机并不会记录下每个要求的地址与控制讯息,如果要作 SPLIT 的话,只会记录下当前传送对象的 ID 讯息。当 S 可完成分段传送时,才会锁定要求的地址与控制讯息。 从机会依序地让仲裁器知道从机要服务哪些要求。 从机可以任何顺序处理要求的服务。 重传: 当从机无法在很短的时间内完成传送的动作时, 它可以要求主机重传。 从机一次只可对一个主机发出 RETRY 信号,确定所服务的主机是同一个时, RETRY 的动作才能完成。如果 RETRY 是不同主机时可以采取下列措 施: (1)给一个 error 回应 (2)通知仲裁器 (3)产生中断 (4)重置系统 7.4 分块传输的总线移交 当主机收到 SPLIT 或 RETRY 响应信号时,必须先进入 IDLE 状态并且重新请求总线使用权,一个新的主机会在 IDLE 周期结束前由仲裁器决定出来。主机在收到 SPLIT 或 RETRY 信号后须立刻进入 IDLE 状态。 (1)在 T2 与 T3, 从机会传两个周期的 SPILT 信号。 (2)该主机在 T3 正沿时发现有 SPLIT 响应信号,于是进入 IDLE 状态。 (3)仲裁器在 T3 正沿时,决定下一个总线的使用者。 (4)在 T4,新的主机送出地址与控制信号 图片
IP&SOC设计
# SOC设计
刘航宇
3年前
0
659
1
AMBA--AHB总线协议介绍(一)
1、AHB总线概述 AHB:Advanced High-performance Bus,即高级高性能总线。AHB总线是SOC芯片中应用最为广泛的片上总线。下图是一个典型的基于AMBA AHB总线的微控制器系统: 图片 SOC架构 图片 基于AMBA AHB的设计中可以包含一个或多个总线主机,通常一个系统里至少包含一个处理器和一个测试接口;DMA和DSP作为总线主机同样是比较常见的。 典型的AHB总线设计包括一下几个部分: (1)AHB主机:主机可以通过提供地址和控制信息发起读写操作;同一时刻总线上只允许一个主机占用总线。 (2)AHB从机:从机需在给定的地址空间范围内响应总线上的读或写操作;从机通过信号将成功、失败、等待数据传输等信息返回至有效的主机。 (3)AHB仲裁器:总线仲裁器确保同一时刻只有一个主机被允许发起传输。所有的AHB总线都必须包含一个仲裁器,即使是在单主机总线系统中。 (4)AHB译码器:译码器的作用是对传输中的地址信号进行译码,并提供给从机一个选择信号。所有的AHB总线中都必须包含一个中央译码器。 2、总线互联 AMBA AHB总线协议被设计为一个使用中央多路选择器的互联方案,如下表: 图片 基于这种方案,所有的主机在需要发起传输时,都可以驱动地址和控制信号,由仲裁器决定哪一个主机的地址和控制信号(写传输时包含写数据信号)连通到总线上的所有从机。同时总线需要一个中央译码器,用于控制读数据和应答信号的多路数据选择器,该多路数据选择器用于选择传输中涉及的从机的相关信号。 3、AHB信号 AHB信号以字母H作为前缀,如下表所示 NameWidthSourceDescriptionHCLK1bit时钟源总线所有传输都基于此时钟,所有信号的时序都与时钟上升沿有关HRESETn1bit复位控制器总线复位信号,总线上唯一低电平有效的信号HADDR32bit主机32位地址总线HTRANS2bit主机表明当前传输的类型HSIZE2bit主机表明传输的大小,典型的是字节(8-bit)、 半字(16-bit)、字(32-bit), 协议允许最大传输大小是1024 bitHWRITE1bit主机传输写信号,高电平表示写传输,低电平表示读传输HBURST3bit主机有自己的HBURST信号有自己的HBURST信号HPROT4bit主机保护控制信号。主要应用于期望实现某些程度的保护级别的模块中HWDATA32bit主机写传输数据。要求最低位宽位32位HSELx1bit译码器从机选择信号,每个AHB从机都有自己的HSEL信号,该信号有效时,表明选中相应从机HRDATA32bit从机读数据总线,用于读操作期间从机向主机传输数据HREADY1bit从机该信号为高时,表明总线传输完成。也可以拉低该信号用以扩展传输HRESP2bit从机传输响应信号。提供四种响应OKAY、ERROR、RETRY、SPLITAMBA AHB也需要一些信号用于支持多主机总线操作,其中一些仲裁信号需要点对点连接: NameWidthSourceDescriptionHBUSREQx1bit主机主机x发送至仲裁器的总线请求信号,总线系统中最多有16个主机,每个主机都有一个HBUSREQ信号HLOCKx1bit主机该信号为高时,表示主机x发起锁定传输HGRANTx1bit仲裁器表明主机x在当前总线上拥有最高的优先级,当HREADY信号为高时,地址/控制信号的所有权将发生变化,故主机x需在HREADY与HGRANTx信号同时为高时,获得总线控制权HMASTER4bit仲裁器表明哪一个主机当前拥有地址/控制信号的所有权HMASTLOCK1bit仲裁器表明当前传输为锁定顺序传输,此信号与HMASTER具有相同时序HSPLITx16bit从机用于指示仲裁器,哪一个主机可以继续完成分块传输4、AMBA AHB操作概述 在一次AHB传输开始之前,主机必须被授予总线访问权。这个过程起始于主机向仲裁器发出一个总线请求,由仲裁器决定该主机何时被授予总线使用权。被授权的主机通过驱动地址和控制信号来发起一次AHB传输,这些信号提供了地址、传输方向、传输宽度等信息,以及会表明当前传输是否为突发传输的一部分。AHB支持两种形式的突发传输: (1)增量突发,在地址边界不进行回环; (2)回环突发,在特定地址边界回环 写数据总线用于将数据从主机发送到从机,读数据总线用于将数据从从机传输到主机。 每次数据传输包含: (1)一个地址和控制周期; (2)一个或多个数据周期 由于地址不支持扩展,所以所有的从机必须在地址周期内采样地址,而数据可以通过HREADY信号进行扩展延长,当HREADY信号为低,总线将插入等待状态,以此提供从机额外的采样数据或者提供数据的时间。 在传输中,从机使用应答信号HRESP[1:0]来表示传输状态: (1)OKAY:OKAY响应表示传输正常,且当HREADY信号为高时,表示传输成功; (2)ERROR:ERROR响应表示发生了传输错误,并且传输失败; (3)RETRY and SPLIT:RETRY和SPLIT都表示当前传输未能即刻完成,但是主机应继续尝试传输 一般而言,仲裁器授权另一个主机前,允许当前被授权主机完成突发传输。然而,为了避免过多的仲裁延迟(当前主机占用过多总线周期),总线可以打断一个突发传输,在这种情况下,主机必须重新申请总线,以完成后续的突发传输。 5、基本传输 一个AHB传输包含两个部分: (1)地址相位,仅包含一个时钟周期; (2)数据相位,可以使用HREADY信号,维持多个时钟周期 下图表示了一个无等待状态的简单传输: 图片 在无等待的简单传输中,主机在HCLK的上升沿驱动地址和控制信号到总线上,在下一个时钟上升沿时,从机对地址和控制信号进行采样,从机采样得到地址和控制信息后,可以驱动应答信号给与主机适当的响应,主机在第三个时钟的上升沿对应答信号进行采样。 这个简单的例子演示了在不同的时钟周期地址和数据相位是怎样产生的。实际上,当前传输的地址相位都对应于前一次传输的数据相位,这种地址和数据交叠现象,是总线能够进行流水线传输的基础,这样不仅能够获得更高的传输性能,也能为从机进行响应提供充足的时间。 从机可以在数据相位中,插入等待状态,以此获得更多得时间来完成传输: 图片 注意: (1)在写传输中,主机需要在整个扩展周期内保持写数据信号稳定 (2)在读传输中,从机没必要提供有效数据,知道传输结束时 当传输以这种方式做扩展时,将对下一个传输的地址相位产生一个扩展的副作用,如下图所示: 图片 该图表示了三个不相关的地址A、B、C上的传输,图中地址A和C的传输都没有等待状态,地址B的传输通过HREADY信号的拉低插入了一个等待的数据相位,这样导致了地址C传输的地址相位进行了扩展。 6、传输类型 AHB传输类型可以分为四种,通过HTRANS[1:0]的取值来划分: HTRANSTypeDescription00IDLE表明没有数据传输的要求。IDLE 用于主机被授予总线,但不希望进行数据传输的情况。对于IDLE传输,从机必须提供一个零等待的OKAY应答,并且忽略该传输01BUSYBUSY传输类型允许主机在突发传输中插入空闲周期。表明主机正在进行突发传输,但下次传输不能立即有效。当主机使用BUSY传输类型时,地址和控制信号必须对应突发中的下一次传输。从机必须提供一个零等待的OKAY应答,并且忽略该传输。10NONSEQ表示突发传输中的第一次传输或者非突发的单次传输,地址和控制信号与前次传输无关.11SEQ突发传输中剩余的传输时连续的,地址和前一次传输是相关的,当前地址值等于前一次传输的地址值加上传输大小(字节), 控制信息和前一次传输相同。在回环的突发传输中,传输的地址在地址边界处回环,回环值的大小等于传输大小(字节) 乘以传输次数(4、8或16) )下图是一个不同传输类型的例子: 图片 从图中可以看出: 第一个传输为以此突发传输的开始(T1),所以其传输类型为NONSEQ; 主机不能立刻执行突发传输中的第二次传输,所以使用了BUSY的传输类型(T2)来延迟下一次传输的开始,注意此时地址已经时下次传输的地址,控制信号和下次传输保持一致,主机只插入了一个BUSY,所以T3执行第二次传输; 主机执行第三次传输(T4),由于从机将HREADY信号拉低,插入了一个等待周期,引起地址相位的扩展; T6周期完成第三次传输,T7周期完成第四次传输(图中T8边沿)。 7、突发操作 AMBA AHB协议定义了4、8和16拍的突发,未定义长度的突发传输以及单次传输;协议支持增量和回环的突发方式。 增量突发方式访问连续地址空间,每次传输的地址是前一次传输地址增加一个增量偏移; 回环突发中,如果传输的其实地址并未和突发中的字节总数对齐,则突发传输地址将在达到边界处回环。例如:一个4拍回环突发的字(4字节)访问将在16字节的边界处回环,如果传输的起始地址为0x34,那么突发中将包含4个地址:0x34,0x38,0x3C,0x30。 AMBA AHB 有8种突发操作,使用信号HBRUST[2:0]表示: HTRANSTypeDescription000SINGLE单一传输001INCR未指定长度的增量突发010WRAP44拍回环突发011INCR44拍增量突发100WRAP88拍回环突发101INCR88拍增量突发110WRAP1616拍回环突发111INCR1616拍增量突发突发不能超过1K的地址边界,所以主机尽量不要发起将要跨过地址边界的定长的增量突发。 一次突发传输的数据总量,等于节拍数乘以每拍包含的字节数。所以突发传输必须将地址边界和数据大小对齐,例如,字传输必须对齐到字地址边界,即A[1:0]=00;半字传输必须对齐到半字地址边界,即A[0]=0。
IP&SOC设计
# SOC设计
刘航宇
3年前
0
1,637
2
上一页
1
...
4
5
6
...
26
下一页