首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
19,201 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
10,151 阅读
3
【高数】形心计算公式讲解大全
8,759 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,456 阅读
5
Vivado-FPGA Verilog烧写固化教程
6,838 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
嵌入式(共32篇)
找到
32
篇与
嵌入式
相关的结果
- 第 2 页
Microsemi Libero SOC使用示例—建立点灯工程
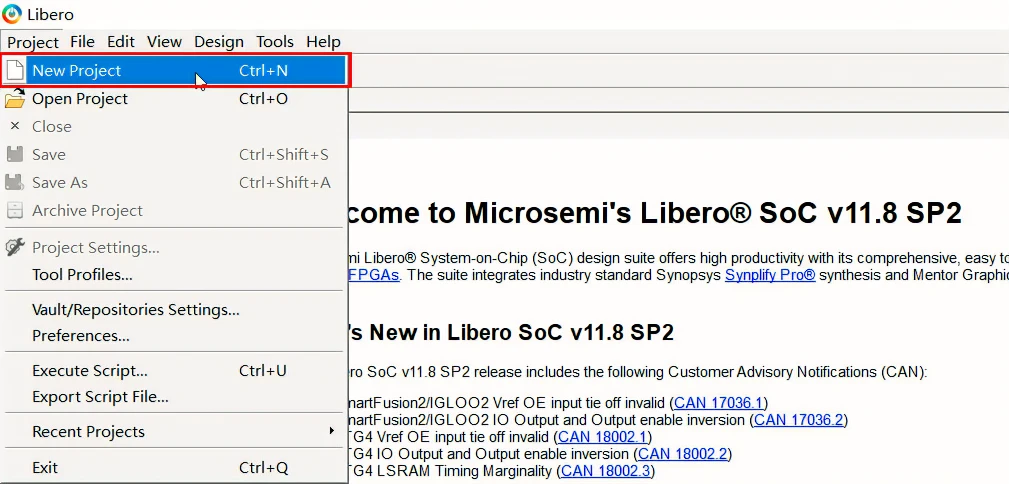
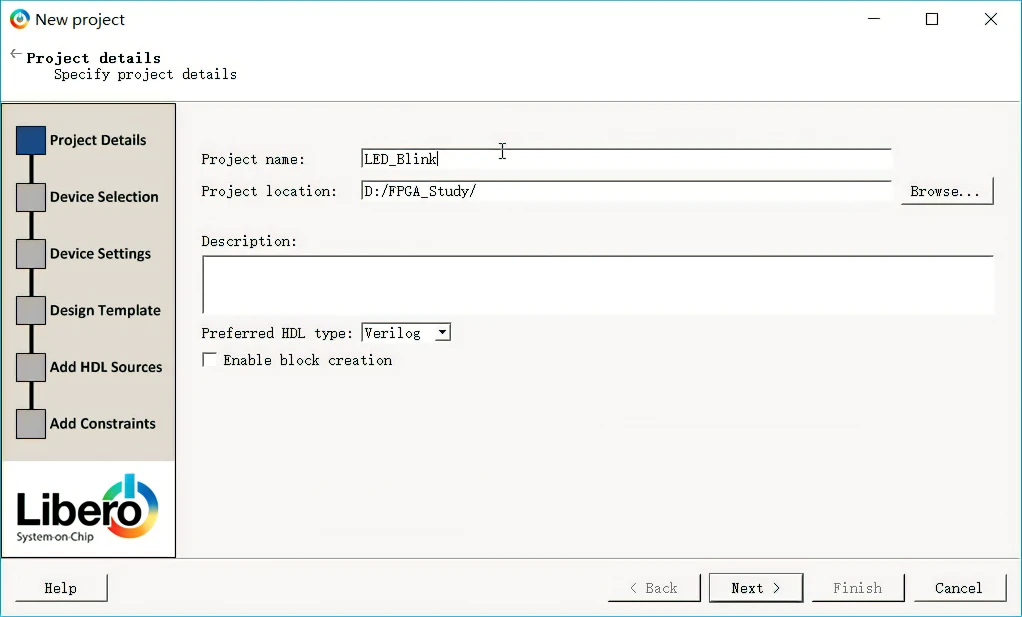
嵌入式开发中的Hello World,点灯是再也基础不过的实验了,通过点灯实验,可以了解芯片GPIO的控制和开发环境IDE新建工程的流程,对于FPGA来说,每个IO口几乎一样,所以本篇文章主要学习一下如何基于Microsemi Libero集成开发环境建立一个示例工程,让一个LED以500ms的频率闪烁,以Microsemi SmartFusion系列FPGA——A2F200M3F为例,Microsemi其他系列FPGA芯片过程类似。 准备工作软件准备: 硬件准备: 新建工程的主要步骤1.新建工程 2.添加设计文件 3.仿真验证 4.管脚分配 5.程序下载 Microsemi FPGA的Flash结构 准备工作 工欲利其事,必先利其器,充分的准备工作很有必要。 软件准备: Microsemi Libero SoC集成开发环境,并已经成功注册,软件版本推荐V11.8或更高版本。 硬件准备: Microsemi FPGA开发板,主控芯片A2F200M3F-PQ208,其他型号芯片类似。 Flash Pro 4或Flash Pro5下载器,用于给FPGA芯片下载程序和调试。 新建工程的主要步骤 新建工程,选择芯片型号等 新建设计,使用Verilog编写点灯模块。 仿真验证,对编写的点灯模块进行时序仿真,来验证是否满足设计需求。 综合、管脚分配、布局、布线。 生成程序文件,连接开发板,使用FlashPro下载程序到芯片内,观察现象是否和设计的一致。 1.新建工程 和大多数IDE一样,选择Project -> New Project,新建一个工程。 image.png图片 输入工程名称LED_Blink,选择工程存放的路径,工程名称和路径不要有中文字符和空格,选择源文件的类型Verilog或者VHDL。 image.png图片 选择芯片型号,这里选择Microsemi SmartFusion系列下的A2F200M3F芯片,PQ208封装,把鼠标放在所选芯片上,可以查看芯片的详细参数:封装、速度等级、温度范围,内核电压、Flash ROM大小、用户IO数目、RAM大小、Flash ROM大小,ARM Cortex-M3 SoC的外设配置等详细的参数。 图片 选择IO的电平标准,不同的电平标准,高低电平的电压范围是不同的,这里选择默认的LVTTL。 图片 是否创建MSS模块,MSS里有PLL和ARM Cortex-M3的使用,以后用到PLL和ARM核时再添加,这里先不选择,以后需要也可以再创建。 图片 是否导入已经存在的HDL文件,如果已经有一些写好的模块,可以在这里直接导入。 图片 是否导入已经存在的管脚约束文件,这里选择不添加,我们会在后面通过图形化工具来指定管脚。 图片 到这里,工程就创建完成了,然后会在存储路径下生成一个和工程名称一样的文件夹,工程相关的所以文件都存放在这里。主要包括以下几个文件夹: 图片 具体每个文件夹存放的是什么文件,我们在以后的文章再详细介绍。以上的工程配置在创建完工程之后,也可以再次更改,可以通过Project->Project Setting查看或更改配置: 图片 或者通过点击如下图标来进入配置界面: 图片 弹出如下窗口,和新建工程是一样的,可以更改FPGA的型号,但只限于同一个系列内。 2.添加设计文件 Microsemi Libero开发环境支持HDL方式和SmarDesign方式来创建设计,HDL方式支持VerilogHDL和VHDL两种硬件描述语言,而SmartDesign方式和Xilinx的Schematic原理图方式是一样的,是通过图形化的方式来对各个模块之间的连接方式进行编辑,两种方式都可以完成设计。由于本实验功能简单,所以以使用Verilog文件为例。 创建Verilog文件 创建Verilog文件有多种方式,可以直接双击左侧菜单中的Create Design->Create HDL 图片 或者点击File->New->HDL,这两种方式都可以创建一个Verilog设计文件,这里选择Verilog文件。 图片 输入模块名称:led_driver,不用添加.v后缀名,Libero软件会自动添加。 源代码: module led_driver( //input input clk, //clk=2MHz input rst_n, //0=reset //output output reg led ); parameter T_500MS = 999999; //1M reg [31:0] cnt; always @ (posedge clk) begin if(!rst_n) cnt <= 32'b0; else if(cnt >= T_500MS) cnt <= 32'b0; else //cnt < T_500MS cnt <= cnt + 32'b1; end always @ (posedge clk) begin if(!rst_n) led <= 1'b1; else if(cnt >= T_500MS) led <= ~led; end endmodule可以看到,代码非常的简单,定义一个计数器,系统时钟为2MHz=500ns,500ms=1M个时钟周期,当计数到500ms时,LED翻转闪烁。 3.仿真验证 编写完成,之后,点击对号进行语法检查,如果没有语法错误就可以进行时序仿真了。 新建Testbench文件 底部切换到Design Hierarchy选项卡,在led模块上右键选择Create Testbechch创建仿真文件,选择HDL格式。 图片 给创建的testbench文件名一般为模块名后加_tb,这里为:led_driver_tb,因为我们的板子外部晶体为2M,所以这里系统时钟周期为500ns,这个也可以在文件中更改。 图片 点击OK之后,可以看到,Libero软件已经为我们生成了一些基本代码,包括输入端口的定义,系统时钟的产生,输入信号的初始化等等。我们只需要再增加几行即可。 `timescale 1ns/100ps module led_driver_tb; parameter SYSCLK_PERIOD = 500;// 2MHZ reg SYSCLK; reg NSYSRESET; wire led; //add output reg initial begin SYSCLK = 1'b0; NSYSRESET = 1'b0; end initial begin #(SYSCLK_PERIOD * 10 ) NSYSRESET = 1'b0; //add system reset #(SYSCLK_PERIOD * 100 ) NSYSRESET = 1'b1; //add system set end always @(SYSCLK) //generate system clock #(SYSCLK_PERIOD / 2.0) SYSCLK <= !SYSCLK; led_driver led_driver_0 ( // Inputs .clk(SYSCLK), .rst_n(NSYSRESET), // Outputs .led(led ) //add port // Inouts ); endmodule仿真代码也非常简单,输入信号初始化,NSYSRESET在10个时钟周期之后拉低,100个时钟周期之后拉高。 使用ModelSim进行时序仿真 仿真代码语法检查无误后,可以进行ModelSim自动仿真,在安装Libero时,已经默认安装了ModelSim仿真软件,并和Libero进行了关联。直接双击Simulate,Libero会自动打开ModelSim。 图片 可以看到输入输出信号,已经为我们添加好了: 图片 先点击复位按钮,复位系统,然后设置要运行的时间,由于设计的是500ms闪烁一次,这里我们先运行2s,即2000ms,在ModelSim中2秒已经算是很长的时间了,然后点击时间右边的运行按钮,耐心等待,停止之后就会看到led按500ms变化一次的波形了,如下图所示,可以再添加一个cnt信号到波形观察窗口,可以看到cnt周期性的变化。 图片 使用2个光标的精确测量,可以看出,led每隔500ms翻转一次,说明程序功能是正确的。 4.管脚分配 与STM32等MCU不同,FPGA的引脚配置非常灵活,如STM32只有固定的几个引脚才能作为定时器PWM输出,而FPGA通过管脚分配可以设置任意一个IO口输出PWM,而且使用起来非常灵活,这也是FPGA和MCU的一个区别,当然其他的功能,如串口外设,SPI外设等等,都可以根据需要自己用HDL代码来实现,非常方便。 时序仿真正常之后,就可以进行管脚分配了,即把模块的输入输出端口,真正的分配到芯片实际的引脚上,毕竟我们的代码是要运行在真正的芯片上的。 打开引脚配置图形化界面 双击Create/Edit I/O Attributes,打开图形化配置界面,在打开之前,Libero会先进行综合(Synthesize)、编译(Complie),当都运行通过时,才会打开配置界面。 图片 分配管脚 管脚可视化配置工具使用起来非常简单:引脚号指定、IO的电平标准,内部上下拉等等,非常直观。把时钟、复位、LED这些管脚分配到开发板原理图中对应的引脚,在分配完成之后,可以点击左上角的commit and check进行检查。 图片 在分配完成之后,为了以后方便查看已经分配的引脚,可以导出一个pdc引脚约束文件,选择Designer窗口下的File->Export->Constraint File,会导出一个led_driver.pdc文件,保存在工程目录下的constraint文件夹。 图片 一些特殊管脚的处理 SmartFusion系列的FPGA芯片,在分配个别引脚,如35-39、43-47这些引脚时,直接不能分配,这些引脚属于MSS_FIO特殊引脚,具体怎么配置为通用IO,可以查看下一篇文章。而新一代的SmartFusion 2系列的FPGA芯片则没有这种情况。 5.程序下载 管脚分配完成之后,连接FlashPro下载器和开发板的JTAG接口,关闭Designer窗口,选择Program Device,耐心等待几分钟,如果连接正常,会在右侧输出编程信息:擦除、验证、编程等操作,下载完成之后,就会看到板子上的LED闪烁起来了。 Microsemi FPGA的Flash结构 和Altera、Xilinx不同,Microsemi FPGA在下载程序时,并不是下载程序到SPI Flash,而是直接下载到FPGA内部的。目前,FPGA 市场占有率最高的两大公司Xilinx和Altera 生产的 FPGA 都是基于 SRAM 工艺的,需要在使用时外接一个片外存储器以保存程序。上电时,FPGA 将外部存储器中的数据读入片内 RAM,完成配置后,进入工作状态;掉电后 FPGA 恢复为白片,内部逻辑消失。这样 FPGA 不仅能反复使用,还无需专门的 FPGA编程器,只需通用的 EPROM、PROM 编程器即可。而Microsemi的SmartFusion、SmartFusion2、ProASICS3、ProASIC3E系列基于Flash结构,具备反复擦写和掉电后内容非易失性, 因此基于Flash结构的FPGA同时具备了SRAM结构的灵活性和反熔丝结构的可靠性,这种技术是最近几年发展起来的新型FPGA实现工艺,目前实现的成本还偏高,没有得到大规模的应用。 示例工程下载 基于Libero V11.8.2.4的工程下载: LED_Blink.rar 下载地址:https://wcc-blog.oss-cn-beijing.aliyuncs.com/Libero/Libero-2/LED_Blink.rar 提取码:
嵌入式&系统
FPGA&ASIC
IP&SOC设计
# ASIC/FPGA
# 嵌入式
# SOC设计
刘航宇
3年前
0
1,781
2
2022-04-20
HAL库开发stm32 DHT11传感器
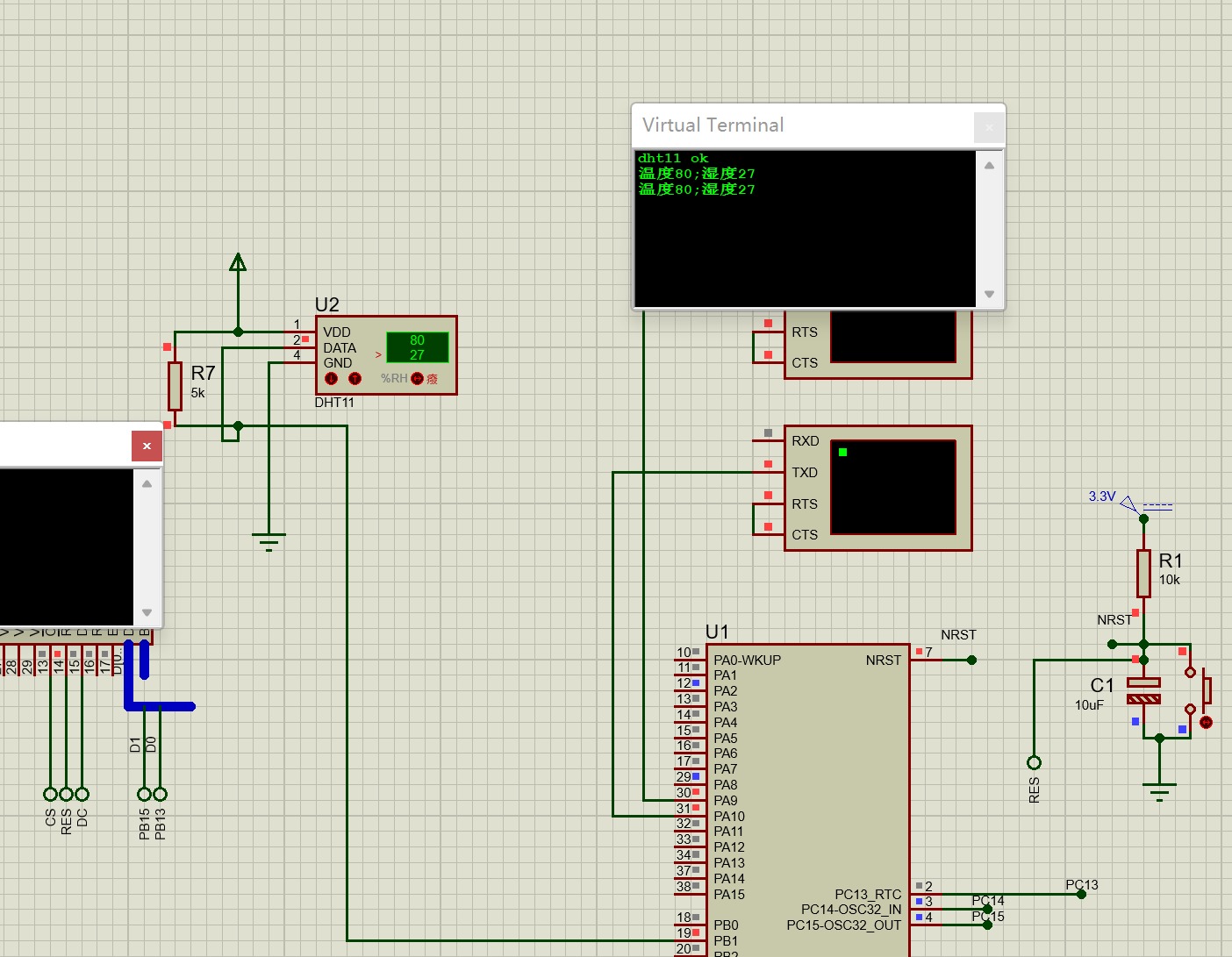
目录 现象 dht11.h dht11.c main.c添加 PB1引脚设置output即可,不想用PB1,修改引脚办法,修改dht11.c文件中的所有端口和引脚 现象 图片 dht11.h #ifndef __HT11_H_ #define __HT11_H_ #include "main.h" #include "stm32f1xx_hal.h" //函数原型 //void delay_us(uint8_t); //微妙延时函数,启用了一个定时器。因为DHT11通讯过程涉及微妙延时 void GPIO_Input(void); //GPIO 状态转变的函数 CUBEMX默认的GPIO初始化我只开启了相关总线的使能 //把GPIO状态(输入 输出)封装成了两个函数 void GPIO_Output(void); void DHT11_Rst(void); //主机开始采集的信号 uint8_t DHT11_Check(void); //检查DHT是否回应 uint8_t DHT11_Init(void); //初始化函数 uint8_t DHT11_ReadBit(void); //读取一位 uint8_t DHT11_ReadByte(void); //读取一个字节 uint8_t DHT11_ReadData(uint8_t *); //读取数据(40个位) #endif dht11.c #include "dht11.h" #define CPU_FREQUENCY_MHZ 72 // CPU主频,根据实际进行修改 static void delay_us(uint32_t delay) { int last, curr, val; int temp; while (delay != 0) { temp = delay > 900 ? 900 : delay; last = SysTick->VAL; curr = last - CPU_FREQUENCY_MHZ * temp; if (curr >= 0) { do { val = SysTick->VAL; } while ((val < last) && (val >= curr)); } else { curr += CPU_FREQUENCY_MHZ * 1000; do { val = SysTick->VAL; } while ((val <= last) || (val > curr)); } delay -= temp; } } void GPIO_Input(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /*Configure GPIO pin : PB1 */ GPIO_InitStruct.Pin = GPIO_PIN_1; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_PULLUP; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); } void GPIO_Output(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /*Configure GPIO pin : PB1 */ GPIO_InitStruct.Pin = GPIO_PIN_1; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); } void DHT11_Rst(void) //主机开始信号 { GPIO_Output(); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); HAL_Delay(20); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET); delay_us(30); } uint8_t DHT11_Check(void) { uint8_t retry = 0; GPIO_Input(); while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) && retry <100) //等待回应拉位低电平 { retry++; delay_us(1); } if(retry >= 100)return 1;else retry = 0; //当变量值大于100 返回1 说明无响应 返回 0 则为正确响应 while(!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) && retry <100) //等待变为高电平 { retry++; delay_us(1); } if(retry >= 100)return 1; return 0; } uint8_t DHT11_Init(void) { DHT11_Rst(); return DHT11_Check(); } uint8_t DHT11_ReadBit(void) //读取一个位 { uint8_t retry = 0; while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) && retry <100) //等待变为低电平 { retry++; delay_us(1); } retry = 0; while(!HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) && retry <100) //等待变为高电平 { retry++; delay_us(1); } delay_us(40); //40us 后如果为低电平 数据为0 高电平数据为1 if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1))return 1;else return 0; } uint8_t DHT11_ReadByte(void) //读取一个字节 返回值位采集值 { uint8_t i,dat; dat = 0; for(i = 0;i < 8;i++) { dat <<= 1; //数据左移一位 dat |= DHT11_ReadBit(); //每读取到一个位 放到dat的最后一位 } return dat; } uint8_t DHT11_ReadData(uint8_t *h) { uint8_t buf[5]; uint8_t i; DHT11_Rst(); if(DHT11_Check() == 0){ for(i = 0;i < 5;i++) { buf[i] = DHT11_ReadByte(); } if(buf[0] + buf[1] + buf[2] + buf[3] == buf[4]) { *h = buf[0]; h++; *h = buf[2]; } }else return 1; return 0; } main.c添加 //你自己要完成OLED显示出温度湿度哈,这个我就不写代码了,不然真的是再喂饭了呜呜 #include "dht11.h" //引入头文件 #include "stdio.h" uint8_t data[2]; //定义一个数据数组 uint8_t buff1[]="dht11 ok\r\n"; uint8_t buff2[]="dht11 error"; uint8_t str_buff[64]; //int main 死循环外面 if(DHT11_Init() == 0) { //这里显示了“温度”“湿度等字符” HAL_UART_Transmit(&huart1,buff1,sizeof(buff1),10000); } else{ //OLED_ShowStr(0,0,"DHT11 error!",1); HAL_UART_Transmit(&huart1,buff2,sizeof(buff2),10000); } HAL_Delay(1000); while (1) { if(DHT11_ReadData(data) == 0) { //显示相关数据 sprintf((char *)str_buff,"温度%d%d;湿度%d%d\r\n",data[0] /10 ,data[0] %10,data[1] /10,data[1] /10); HAL_UART_Transmit(&huart1,str_buff,sizeof(str_buff),10000); } HAL_Delay(1000); //DHT11每次采集一定要间隔1s //你自己要完成OLED显示出温度湿度哈,这个我就不写代码了,不然真的是再喂饭了呜呜! }
嵌入式&系统
# 嵌入式
刘航宇
4年前
0
1,186
16
2022-01-31
【10】基于STM32CubeMX-STM32ADC与OLED开发
目录 实训案例:ADC与OLED综合训练 实训案例:ADC与OLED综合训练 在XMF07A或XMF07C开发板上,利用STM32CubeMX和Keil5协同开发,完成以下的功能: 【1】 上电开机后,首选在OLED上显示“强国图志”图片,然后让LED1与LED2依次点亮,然后熄灭,进行灯光检测。灯光检测结束后,OLED切换至数据显示界面,分3行: 第1行显示:“ sciarm.com ” 第2行显示:“采样值:” 第3行显示:“电压值:” 【2】在主程序中,采用查询的方式,每隔0.3秒对ADC_IN0通道的光敏传感器进行一次电压数据采集,并将采样到的12位数据换算成对应的实际电压值。LED1作为A/D采样指示灯,每采样一次闪烁一下。 【3】每进行完一次光敏传感器的数据采样和电压换算后,将其结果更新到OLED显示屏中相应的位置。如果光敏传感器的电压值小于1.3V,则将LED2灯点亮,反之,将LED2灯关闭。 图片 //首先需要进行OLED的底层驱动函数移植,生成相应的文字和图片数据 /* USER CODE BEGIN Includes */ //====引入OLED底层驱动的头文件======== #include "XMF_OLED_STM32Cube.h" #include "stdio.h" /* USER CODE END Includes */extern unsigned char BMP1[]; #define LED1_ON() HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9,GPIO_PIN_SET) #define LED2_ON() HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8,GPIO_PIN_SET) #define LED1_OFF() HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9,GPIO_PIN_RESET) #define LED2_OFF() HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8,GPIO_PIN_RESET) uint16_t ADC0_Value = 0; uint16_t ADC_Volt = 0; uint8_t str_buff[64];//LED灯流水点亮检测 void LED_Check() { LED1_ON(); HAL_Delay(500); LED2_ON(); HAL_Delay(500); LED1_OFF(); HAL_Delay(500); LED2_OFF(); HAL_Delay(500); }//显示开机LOGO图片 void OLED_display_pic() { OLED_Clear(); OLED_DrawBMP(0,0,128,8,BMP1); }//显示数据显示界面 void OLED_display_info() { OLED_Clear(); OLED_ShowString(6,0,(uint8_t *)"sciarm.com"); HAL_Delay(200); OLED_ShowCHinese(0,3,24); OLED_ShowCHinese(18,3,25); OLED_ShowCHinese(36,3,26); OLED_ShowString(54,3,(uint8_t *)":"); HAL_Delay(200); OLED_ShowCHinese(0,6,16); OLED_ShowCHinese(18,6,17); OLED_ShowCHinese(36,6,26); OLED_ShowString(54,6,(uint8_t *)":"); HAL_Delay(200); }//更新ADC采样数据与换算结果 void OLED_display_dat() { sprintf((char*)str_buff, "%4d", ADC0_Value); OLED_ShowString(64,3,(uint8_t *)str_buff); sprintf((char*)str_buff, "%d.%d%dV", ADC_Volt/100, (ADC_Volt%100/10), ADC_Volt%10); OLED_ShowString(64,6,(uint8_t *)str_buff); }//ADC采样过程与灯光自动控制 void Get_ADC0_Value() { HAL_ADC_Start(&hadc1); if(HAL_OK == HAL_ADC_PollForConversion(&hadc1, 30)) { ADC0_Value = HAL_ADC_GetValue(&hadc1); ADC_Volt = ADC0_Value * 330 / 4096; if(ADC_Volt < 130) { LED2_ON(); } else { LED2_OFF(); } } HAL_ADC_Stop(&hadc1); }/* USER CODE BEGIN 2 */ OLED_Init(); //初始化OLED OLED_display_pic(); //显示开机LOGO图片 LED_Check(); //灯光检测 OLED_display_info(); //显示数据界面 /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { LED1_ON(); //ADC采样指示灯点亮 Get_ADC0_Value(); //进行一次ADC采样及逻辑处理 OLED_display_dat(); //更新OLED中的采样数据 HAL_Delay(200); //延时0.2秒 LED1_OFF(); //ADC采样指示灯关闭 /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */
嵌入式&系统
# 嵌入式
刘航宇
4年前
0
1,055
13
2022-01-29
【9】基于STM32CubeMX-STM32OLED开发
目录 必备文件 关于OLED的概述 OLED开发相关资源下载 基于STM32CubeMX的OLED底层驱动函数移植 OLED驱动库中常用的函数 实训案例:STM32控制OLED显示 必备文件 OLED文件-SPI版 下载地址:https://wwu.lanzoub.com/iCqK302ybokh 提取码: OLED I2C版4脚 下载地址:https://wwi.lanzouw.com/ilMr9zjrhsb 提取码: 关于OLED的概述 OLED:Organic Light-Emitting Display,有机发光显示。 OLED具备自发光、厚度薄、视角广、功耗低、对比度高、响应速度快、可用于挠曲性面板、使用温度范围广、构造及其制作过程较简单等优异特性,并认为是一种比液晶显示更为先进的新一代平板显示技术。以目前的技术,OLED的尺寸还难以大型化,但是分辨率却可以做得很高。 基于STM32的OLED应用,要做那些事情: 【1】移植OLED的底层驱动函数库。 【2】准备需要的中文字符和图片等数据。 【3】调用OLED驱动库中的底层函数进行应用开发。 图片 OLED开发相关资源下载 基于STM32CubeMX的OLED屏驱动程序库(内含4个文件) 【1】XMF_OLED_STM32Cube.c:驱动程序的源文件。 【2】XMF_OLED_STM32Cube.h:驱动程序的头文件。 【3】XMF_OLED_Font.h:字库数据文件。 【4】XMF_OLED_BMP.h:图片数据文件。 基于STM32CubeMX的OLED底层驱动函数移植 【1】将4个驱动文件拷贝到工程文件中,和main.c放在同一目录,并将XMF_OLED_STM32Cube.c添加到工程代码文件中,并在main.c中引入头文件XMF_OLED_STM32Cube.h。 【2】根据所选用的芯片型号,修改XMF_OLED_STM32Cube.h头文件中所以用的芯片头文件。 【3】根据硬件电路原理图中,修改XMF_OLED_STM32Cube.h中OLED的引脚定义。 【4】查看OLED_Init(void)初始化函数的源码,根据电路接口和应用需要进行修改。 图片 OLED驱动库中常用的函数 void OLED_Init(void); //OLED初始化函数 void OLED_Clear(void); //OLED清屏函数//显示英文字符串函数 void OLED_ShowString(unsigned char x,unsigned char y,unsigned char *p); 参数1:x,起点列坐标,0~127 参数2:y,起点行坐标,0~7 参数3:*p,字符串指针 返回值:void,无。//显示中文字符函数 void OLED_ShowCHinese(unsigned char x,unsigned char y,unsigned char no); 参数1:x,起点列坐标,0~127 参数2:y,起点行坐标,0~7 参数3:no,待显示中文字符在数组Hzk[][32]中的位置。 返回值:void,无。//显示图片函数 void OLED_DrawBMP( unsigned char x0, unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[]); 参数1:x0,起点列坐标,0~127 参数2:y0,起点行坐标,0~7 参数3:x1,图片的列范围,1~128 参数4:y1,图片的行范围,1~8 参数5:BMP[],待显示图片数据的数组。 返回值:void,无。实训案例:STM32控制OLED显示 要点 图片 字库软件中行前后缀不需要括号 在XMF07A或XMF07C开发板上,利用STM32CubeMX和Keil5协同开发,完成以下的功能: 【1】用取字模软件生产一张图片数据,作为开机界面在OLED上显示。 【2】0.5秒后进入信息界面, 第1行显示网址“sciarm.com”, 第2行显示中文“小蜜蜂笔记”,第3行显示日期“2022-02-18”。 图片 //用取字模软件生成开机LOGO图片数据,并拷贝到XMF_OLED_BMP.h的数组中。 const unsigned char BMP1[] = { 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, //此处省略64×62个字节元素 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, };//用取字模软件生成所需中文字符数据,保持到XMF_OLED_Font.h中的Hzk[]数组。 const unsigned char Hzk[][32]={ {0x00,0x00,0x00,0xE0,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x20,0x40,0x80,0x00,0x00}, {0x08,0x04,0x03,0x00,0x00,0x40,0x80,0x7F,0x00,0x00,0x00,0x00,0x00,0x01,0x0E,0x00},/*"小",0*/ /* (16 X 16 , 宋体 )*/ {0x10,0x4C,0x24,0x04,0xF4,0x84,0x8D,0x56,0x44,0x24,0x14,0xC4,0x24,0x54,0x0C,0x00}, {0x00,0x41,0x5D,0x55,0x54,0x55,0x55,0x7F,0x55,0x55,0x55,0x55,0x7C,0xC0,0x00,0x00},/*"蜜",1*/ /* (16 X 16 , 宋体 )*/ {0x00,0xF8,0x08,0xFF,0x08,0xF8,0x80,0x90,0x4C,0x57,0xA4,0x54,0x4C,0x84,0x80,0x00}, {0x20,0x63,0x21,0x1F,0x11,0x39,0x10,0x10,0x15,0x15,0xFF,0x15,0x15,0x10,0x10,0x00},/*"蜂",2*/ /* (16 X 16 , 宋体 )*/ {0x10,0x08,0x44,0x47,0x4C,0x54,0x44,0xD4,0x28,0x27,0x24,0x2C,0x34,0x04,0x04,0x00}, {0x00,0x10,0x12,0x12,0x12,0x12,0x12,0x7F,0x89,0x89,0x89,0x89,0x89,0x88,0xF0,0x00},/*"笔",3*/ /* (16 X 16 , 宋体 )*/ {0x40,0x40,0x42,0xCC,0x00,0x00,0x00,0x84,0x84,0x84,0x84,0x84,0xFC,0x00,0x00,0x00}, {0x00,0x00,0x00,0x7F,0x20,0x10,0x00,0x3F,0x40,0x40,0x40,0x40,0x41,0x40,0x70,0x00},/*"记",4*/ /* (16 X 16 , 宋体 )*/ };extern unsigned char BMP1[]; void OLED_display_pic() { OLED_Clear(); OLED_DrawBMP(0,0,128,8,BMP1); }void OLED_display_info() { OLED_Clear(); OLED_ShowString(6,0,(uint8_t *)"sciarm.com"); OLED_ShowCHinese(10,3,0); //小 OLED_ShowCHinese(28,3,1); //蜜 OLED_ShowCHinese(46,3,2); //蜂 OLED_ShowCHinese(64,3,3); //笔 OLED_ShowCHinese(82,3,4); //记 OLED_ShowString(24,6,(uint8_t *)"2022-02-18"); }//在mian()函数中添加下面的代码: /* USER CODE BEGIN 2 */ OLED_Init(); //OLED初始化 OLED_display_pic(); //显示图片 HAL_Delay(500); //延时0.5秒 OLED_display_info(); //显示信息 /* USER CODE END 2 */
嵌入式&系统
# 嵌入式
刘航宇
4年前
17
2,007
14
2022-01-26
【8】基于STM32CubeMX-STM32ADC开发基础
目录 STM32的ADC资源概述 ADC启动与停止相关的HAL库函数 ADC转换结果读取的HAL库函数 查询方式,阻塞式A/D转换HAL库函数 中断方式,非阻塞式A/D转换HAL库函数 实训案例:ADC单次数据采样与电压换算用查询,阻塞的方式来实现 用中断,非阻塞的方式来实现 STM32的ADC资源概述 STM32F103ZE芯片(144脚)中有ADC1、ADC2、ADC3共3个12位逐次逼近型模数转换器,具有18个测量通道,可测量16个外部和2个内部信号源(内部温度和内部参考电压)。这2个内部信号源只能连接到ADC1。 ADC的各个通道的A/D转换可以单次、连续、扫描或间断模式执行。 A/D转换结果以左对齐或右对齐的方式,存储在16位规则组或者注入组数据寄存器中。 按照A/D转换的组织形式来划分,ADC的模拟输入通道分为规则组和注入组两种。 ADC可以对一组最多16个通道按照指定的顺序逐个进行转换,这组指定的通道称为规则组。 在实际应用中,可能需要中断规则组的转换,临时对某些通道进行转换,好像这些通道注入了原来的规则组,故称注入组,最多由4个通道组成。 ADC启动与停止相关的HAL库函数 //查询,阻塞方式,启动ADC HAL_StatusTypeDef HAL_ADC_Start(ADC_HandleTypeDef* hadc); //查询,阻塞方式,停止ADC HAL_StatusTypeDef HAL_ADC_Stop(ADC_HandleTypeDef* hadc); //中断,非阻塞方式,启动ADC HAL_StatusTypeDef HAL_ADC_Start_IT(ADC_HandleTypeDef* hadc); //中断,非阻塞方式,停止ADC HAL_StatusTypeDef HAL_ADC_Stop_IT(ADC_HandleTypeDef* hadc);ADC转换结果读取的HAL库函数 uint32_t HAL_ADC_GetValue(ADC_HandleTypeDef* hadc); 参数1:hadc,ADC实例指针。 返回值:uint32_t,ADC转换结果。查询方式,阻塞式A/D转换HAL库函数 HAL_StatusTypeDef HAL_ADC_PollForConversion(ADC_HandleTypeDef* hadc, uint32_t Timeout); 参数1:hadc,ADC实例指针。 参数2:Timeout,超时时间。 返回值:HAL_StatusTypeDef,函数执行状态。应用实例:用查询的方式,进行一次A/D采样并将结果读出。 uint16_t ADC_Value = 0; //以查询的方式启动ADC HAL_ADC_Start(&hadc); //等待一次规则组的ADC转换完成,并将结果读出 if(HAL_OK == HAL_ADC_PollForConversion(&hadc1,10)) { ADC0_Value = HAL_ADC_GetValue(&hadc1); }中断方式,非阻塞式A/D转换HAL库函数 应用实例:用中断的方式,进行一次A/D采样并将结果读出。 uint16_t ADC_Value = 0; //以中断的方式启动ADC HAL_ADC_Start_IT(&hadc); //重写ADC转换完成中断回调函数 void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) { ADC0_Value = HAL_ADC_GetValue(&hadc1); }实训案例:ADC单次数据采样与电压换算 在XMF07A或XMF07C开发板上,利用STM32CubeMX和Keil5协同开发,完成以下的功能: 【1】将ADC_IN0设置为12位ADC,右对齐,启用中断。 【2】分别用查询和中断这2种方式,每隔0.5秒采样一次ADC的数据。 【3】将每次读取到的ADC采样值转换为对应电压值,发送到上位机。 【4】LED1作为采样指示灯,在ADC转换过程中点亮,其余时间熄灭。 图片 要点配置 图片 图片 串口 图片 没有接收中断,不需要对NVIC进行使能 #include "stdio.h" #define LED1_ON() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET) #define LED1_OFF() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET) uint16_t ADC0_Value = 0, ADC0_Volt = 0; uint8_t str_buff[64];void UR1_Send_Info() { sprintf((char *)str_buff,"采样值:%d,电压值:%d.%d%dV\r\n",ADC0_Value,ADC0_Volt/100,(ADC0_Volt%100)/10,ADC0_Volt%10); HAL_UART_Transmit(&huart1,str_buff,sizeof(str_buff),10000); }用查询,阻塞的方式来实现 void Get_ADC_Value() { HAL_ADC_Start(&hadc1); LED1_ON(); if(HAL_OK == HAL_ADC_PollForConversion(&hadc1,10)) { ADC0_Value = HAL_ADC_GetValue(&hadc1); ADC0_Volt = ADC0_Value * 330 / 4096; } UR1_Send_Info(); LED1_OFF(); HAL_ADC_Stop(&hadc1); }//在mian()函数中添加以下代码: /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { Get_ADC_Value(); //启动一个阻塞式的ADC转换并读取数据 // UR1_Send_Info(); //向上位机发生采样值和电压值 HAL_Delay(500); //延时0.5秒,再进行下一次ADC采样 /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */用中断,非阻塞的方式来实现 void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) { if(hadc->Instance == ADC1) { ADC0_Value = HAL_ADC_GetValue(&hadc1); //读取ADC转换结果 ADC0_Volt = ADC0_Value * 330 / 4096; //将采样值换算成电压值 UR1_Send_Info(); //向上位机发生ADC采样信息 LED1_OFF(); //关闭LED1采样指示灯 } }//在mian()函数中添加以下代码: /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { HAL_ADC_Start_IT(&hadc1); //启动一个非阻塞式的ADC转换并读取数据 LED1_ON(); //点亮LED1采样指示灯 HAL_Delay(500); //延时0.5秒,再进行下一次ADC采样 /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */
嵌入式&系统
# 嵌入式
刘航宇
4年前
1
1,455
11
【7】基于STM32CubeMX-STM32ADC模数转化基本原理
目录 模数转换器(ADC)概述 ADC的几个技术指标 剖析ADC的基本转换过程 实训案例:ADC数据采样的计算应用 模数转换器(ADC)概述 ADC:Analog-to-Digital Converter 将时间和幅值连续的模拟量转化为时间和幅值离散的数字量,A/D转换一般要经过采样、保持、量化和编码4个过程。 常用ADC:逐次逼近型、双积分型、∑-Δ型。 图片 ADC的几个技术指标 【1】量程:指ADC所能输入模拟信号的类型和电压范围,即参考电压。信号类型包括单极性和双极性。 【2】转换位数:量化过程中的量化位数n。 A/D转换后的输出结果用n位二进制数来表示。 【例】:10位ADC的输出值就是0~1023。 【3】分辨率:ADC能够分辨的模拟信号最小变化量。计算公式是,分辨率 = 量程 / 2的n次方 【例】:量程为单极性0-5V,8位ADC的分辨率是,5 / 256 = 0.0195V 【4】转换时间:ADC完成一次完整的A/D转换所需要的时间,包括采样、保持、量化、编码的全过程。 剖析ADC的基本转换过程 图片 实训案例:ADC数据采样的计算应用 有一个温度测控系统,已知温度传感器在0到100度之间为线性输出,参考电压为5V,采用8为的A/D转换器,0度的时候,测的电压为1.8伏,100度的时候,测的电压为4.3伏。 【问题1】:系统的分辨率是多少? 【问题2】:采集到数据10010001,表示多大电压?温度是多少? 由于温度是线性变化,先求得斜率k,得到温度和电压的关系表达式。 k = (100 – 0)/(4.3-1.8) = 40, y = 40*(x-1.8) (x为采样得到的电压) 由于采用的是8为ADC,参考电压为5V,所以分辨率为: 5 / 256 = 0.0195V = 19.5mV(最小能分辨的电压,分辨率) 0.0195 * 40 = 0.78度(最小能分辨的温度) 因为 10010001B = 91H = 145(16x9+1), 所以 0.0195 * 145 = 2.8275V 该电压信号对应的温度是:(2.83V – 1.8V) * 40 = 41.1摄氏度
嵌入式&系统
# 嵌入式
刘航宇
4年前
0
1,040
14
2022-01-23
【6】基于STM32CubeMX-STM32定时器与串口综合训练
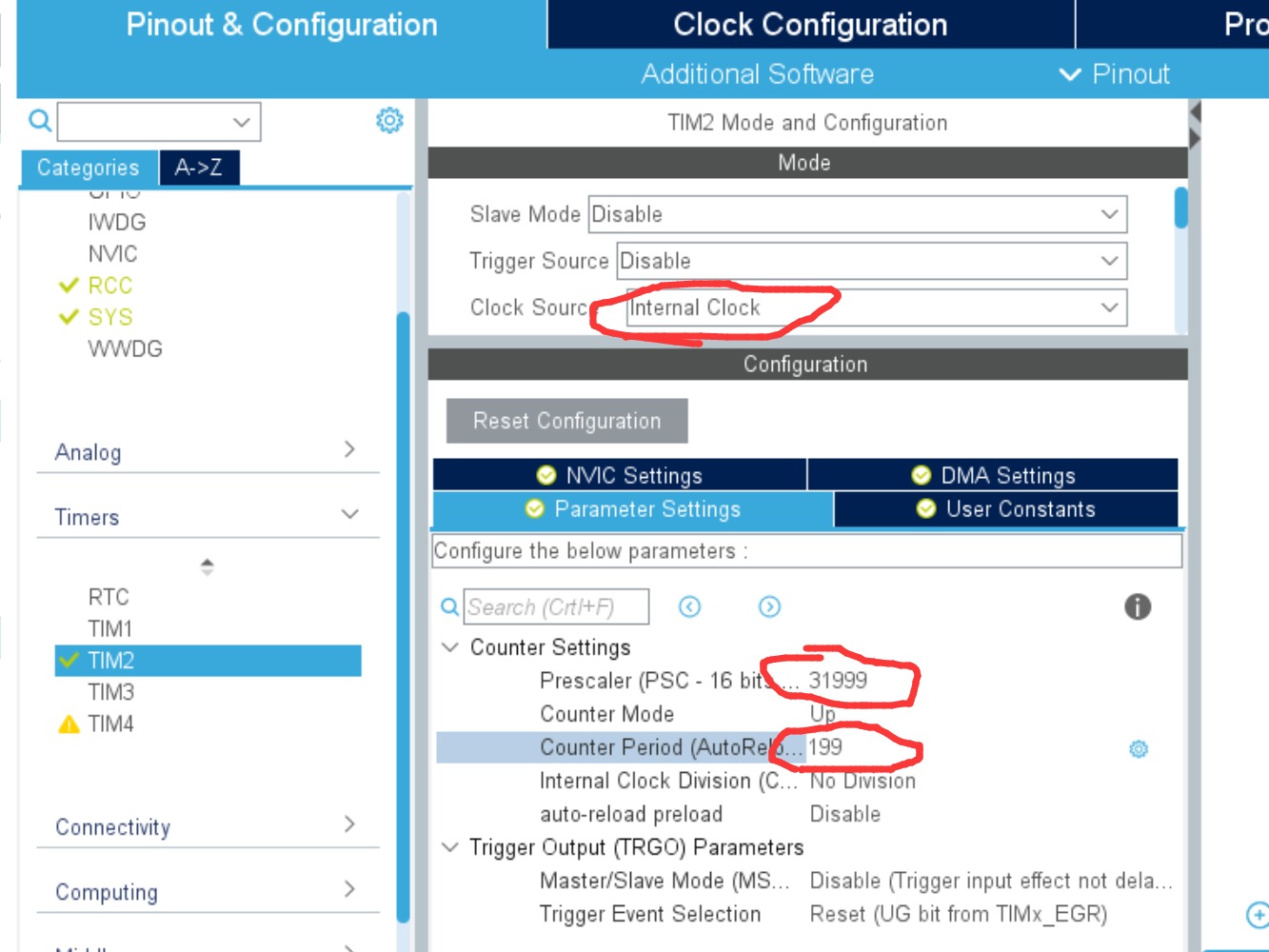
目录 关于sprintf()函数的用法 实训案例:定时器与串口综合训练 关于sprintf()函数的用法 sprintf(),指的是字符串格式化函数,把格式化的数据写入某个字符串中。 int sprintf(char string, char format [,argument,…]); 引入头文件 #include “stdio.h“ 【例】:有一个表示温度的整型变量tmp,现在要将其格式化为字符串“温度是:XX摄氏度”,并将其通过串口1发送出去。 #include "stdio.h" uint8_t Str_buff[64]; sprintf((char*)Str_buff, "温度是: %d摄氏度", tmp); HAL_UART_Transmit(&huart1, Str_buff, sizeof(Str_buff), 0xFFFF);实训案例:定时器与串口综合训练 配置要点 时钟 图片 图片 外设 图片 图片 在XMF07A或XMF07C开发板上,利用STM32CubeMX和Keil5协同开发,完成以下的功能: 【1】开机后,LED1与LED2依次点亮,然后熄灭,进行灯光检测,高电平点亮LED灯。 【2】系统通过串口1向上位机发送一个字符串“=========XMF07欢迎你!==========”。 【3】LED1作为一个秒闪灯,系统向上位机发送完字符串后,开始亮0.5 秒,灭0.5秒….循环闪烁,并启动系统运行时间的记录,其时分秒格式为 “XX:XX:XX”。 【4】上位机通过一个由3个字节组成的命令帧控制LED2灯的开关。 该命令帧的格式为 “0xBF 控制字 0xFB”。 0xBF为帧头,0xFB为帧尾,控制字的定义如下: 0xA1:打开LED2,返回信息 “XX:XX:XX LED2打开。” 0xA2:关闭LED2,返回信息 “XX:XX:XX LED2关闭。” 其他:返回信息 “XX:XX:XX 这个一个错误指令!”。 #define LED1_ON() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET) #define LED2_ON() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET) #define LED1_OFF() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET) #define LED2_OFF() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET) #define LED1_TOG() HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9) #define LED2_TOG() HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8) uint8_t str1[] = "===============XMF07欢迎你!================\r\n"; uint8_t hh = 0, mm = 0, ss = 0, ss05 = 0; uint8_t str_buff[64]; uint8_t Rx_dat[16];void Ckeck_LED() { LED1_ON(); HAL_Delay(500); LED2_ON(); HAL_Delay(500); LED1_OFF(); HAL_Delay(500); LED2_OFF(); HAL_Delay(500); }void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { LED1_TOG(); ss05++; if(ss05 == 2) { ss05 = 0; ss++; if(ss == 60) { ss = 0; mm++; if(mm == 60) { mm = 0; hh++; } } } }void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART1) { if(Rx_dat[0] == 0xBF && Rx_dat[2] == 0xFB) { switch(Rx_dat[1]) { case 0xa1: LED2_ON(); sprintf((char *)str_buff,"%d:%d:%d LED2打开!\r\n",hh,mm,ss); break; case 0xa2: LED2_OFF(); sprintf((char *)str_buff,"%d:%d:%d LED2关闭!\r\n",hh,mm,ss); break; default: sprintf((char *)str_buff,"%d:%d:%d 这是一个错误的命令!\r\n",hh,mm,ss); break; } HAL_UART_Transmit(&huart1,str_buff,sizeof(str_buff),10000); HAL_UART_Receive_IT(&huart1,Rx_dat,3); } } }//在mian()函数中添加以下代码: Ckeck_LED(); //LED灯流水检测 HAL_UART_Transmit(&huart1,str1,sizeof(str1),0xFFFF); //向上位机发送欢迎字符 HAL_UART_Receive_IT(&huart1,Rx_dat,3); //启动串口1接收上位机3个字节 HAL_TIM_Base_Start_IT(&htim2); //启动定时器TIM2
嵌入式&系统
# 嵌入式
刘航宇
4年前
0
1,036
11
2022-01-21
【5】基于STM32CubeMX-STM32串口数据收发
目录 串行接口相关知识点 HAL库中串口发送的重要函数 HAL库中串口接收的重要函数 实训案例:上位机通过串口控制LED灯开关 串行接口相关知识点 并行通信、串行通信的概念。 单工、半双工、全双工的概念。 异步串行通信:通信双方在没有同步时钟的前提下,将一个字符(包括特定的附加位)按位进行传输的通信方式。 波特率:每秒钟传输的二进制位数,如9600bps。 TTL电平<—->RS232:MAX3232 SP3232 串口<———>USB接口:CH340 CP2012 STM32芯片的串口UASRT功能十分强大,但对于日常编程而言,使用最多的还是异步串行通信。 串口1:USART1_TX与PA9复用,USART1_RX与PA10复用。 串口2:USART2_TX与PA2复用,USART2_RX与PA3复用。 HAL库中串口发送的重要函数 ////查询方式,阻塞式发送函数(初学者,推荐使用) HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart,uint8_t *pData,uint16_t Size, uint32_t Timeout); 参数1:huart,串口实例的指针。 参数2:*pData,待发送数据缓冲区的指针。 参数3:Size,待发送数据的字节数。 参数4:Timeout,超时时间值。 返回值:HAL_StatusTypeDef,函数执行状态。 typedef enum { HAL_OK = 0x00U, HAL_ERROR = 0x01U, HAL_BUSY = 0x02U, HAL_TIMEOUT = 0x03U } HAL_StatusTypeDef; ////中断方式,非阻塞式发送函数 HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart,uint8_t *pData, uint16_t Size); 参数1:huart,串口实例的指针。 参数2:*pData,待发送数据缓冲区的指针。 参数3:Size,待发送数据的字节数。 返回值:HAL_StatusTypeDef,函数执行状态。 ////串口发送完毕中断回调函数 void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart)应用举例:使用非阻塞式的串口发送函数,将发送缓数组dat_Txd中的前5个数据发送到USART1,在数据发送完成后,翻转PB9引脚的输出电平。 //使用中断,非阻塞方式 HAL_UART_Transmit_IT(&huart1, dat_Txd, 5); void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART1); { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9); } } //使用查询,阻塞方式 HAL_UART_Transmit(&huart1, dat_Txd, 5, 10000); HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);HAL库中串口接收的重要函数 ////查询方式,阻塞式接收函数 HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout); 参数1:huart,串口实例的指针。 参数2:*pData,数据接收据缓冲区的指针。 参数3:Size,待接收数据的字节数。 参数4:Timeout,超时时间值。 返回值:HAL_StatusTypeDef,函数执行状态。 非阻塞式接收函数(推荐使用) HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart,uint8_t *pData,uint16_t Size); 参数1:huart,串口实例的指针。 参数2:*pData,数据接收据缓冲区的指针。 参数3:Size,待接收数据的字节数。 返回值:HAL_StatusTypeDef,函数执行状态。 ////串口接收完毕中断回调函数 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);应用举例:使用非阻塞式的串口接收函数,接收USART1中的一个字节,将其保存在dat_Rxd变量中,在数据接收完成后,判断该字节,若为0x5A,则翻转PB8引脚的输出电平。 //使用中断,非阻塞方式 HAL_UART_Transmit_IT(&huart1, &dat_Rxd, 1); void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART1) { if(dat_Rxd == 0x5A) HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8); } }实训案例:上位机通过串口控制LED灯开关 调试要点: 图片 在XMF07A或XMF07C开发板上,利用STM32CubeMX和Keil5协同开发,完成以下的功能: 【1】开机后,向串口1发送“hello world!”。 【2】串口1收到字节指令“0xA1”,打开LED1,发送“LED1 Open!”。 【3】串口1收到字节指令“0xA2”,关闭LED1,发送“LED1 Closed!”。 【4】在串口发送过程中,打开LED2作为发送数据指示灯。 图片 #define LED1_ON() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET) #define LED1_OFF() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET) #define LED2_ON() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET) #define LED2_OFF() HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET) uint8_t Tx_str1[] = "hello world!\r\n"; uint8_t Tx_str2[] = "LED1 Open!\r\n"; uint8_t Tx_str3[] = "LED1 Closed!\r\n"; uint8_t Rx_dat = 0;void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART1) { if(Rx_dat == 0xa1) { LED1_ON(); LED2_ON(); HAL_UART_Transmit(&huart1,Tx_str2,sizeof(Tx_str2),10000); LED2_OFF(); HAL_UART_Receive_IT(&huart1,&Rx_dat,1); } else if(Rx_dat == 0xa2) { LED1_OFF(); LED2_ON(); HAL_UART_Transmit(&huart1,Tx_str3,sizeof(Tx_str3),10000); LED2_OFF(); HAL_UART_Receive_IT(&huart1,&Rx_dat,1); } } }//在mian()函数中添加以下代码: LED2_ON(); HAL_UART_Transmit(&huart1,Tx_str1,sizeof(Tx_str1),10000); //向上位机发送“hello world!” LED2_OFF(); HAL_UART_Receive_IT(&huart1,&Rx_dat,1); //启动串口1接收上位机1个字节
嵌入式&系统
# 嵌入式
刘航宇
4年前
2
1,594
19
【4】基于STM32CubeMX-STM32定时器开发
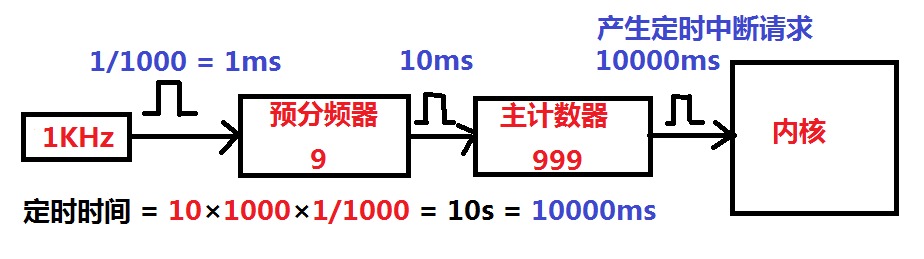
目录 定时器的基本概述 STM32通用定时器的重要知识点 实训案例:外部中断信号控制LED灯开关 定时器的基本概述 通过滴漏和漏沙瓶这两个例子简单讲述定时器的基本工作原理。 STM32的常见的定时器资源: 系统嘀嗒定时器SysTick、看门狗定时器WatchDog、实时时钟RTC、基本定时器、通用定时器、高级定时器。 系统嘀嗒定时器SysTick :这是一个集成在Cortex M3内核当中的定时器,它并不属于芯片厂商的外设,也就是说使用ARM内核的不同厂商,都拥有基本结构相同的系统定时器。主要目的是给RTOS提供时钟节拍做时间基准。 基本定时器:TIM6、TIM7。 通用定时器:TIM2、TIM3、TIM4、TIM5。在基本定时器的基础上,实现输出比较、输入捕获、PWM生成、单脉冲模式输出等功能。这类定时器最具代表性,使用也最广泛。 高级定时器:TIM1、TIM8。 STM32通用定时器的重要知识点 通用定时器的基本结构组成: STM32的通用定时器,是一个通过可编程预分频器(Prescaler)驱动的16位自动重装主计数器(Counter Period)构成。可以对内部时钟或触发源以及外部时钟或触发源进行计数。 通用定时器的基本工作原理: 首先,定时器时钟信号送入16位可编程预分配器(Prescaler),该预分配器系数为0~65535之间的任意数值。预分配器溢出后,会向16位的主计数器(Counter Period)发出一个脉冲信号。 预分频器,本质上是一个加法计数器,预分频系数实际上就是加计数的溢出值。 定时器发生中断时间的计算方法: 定时时间 = (Prescaler+1 ) X (Counter Period+1) X 1/ 定时器时钟频率 时钟信号1KHz,Prescaler为9,Counter Period为999,定时时间? 图片 计算案例 图片 实训案例:外部中断信号控制LED灯开关 配置要点 图片 图片 图片 图片 图片 图片 图片 图片 在XMF07A或XMF07C开发板上,利用STM32CubeMX和Keil5协同开发,完成以下的功能: 【1】利用TIM2实现间隔定时,每隔0.2秒将LED1的开关状态翻转。 【2】利用TIM3实现间隔定时,每隔1秒将LED2的开关状态翻转。 【3】修改TIM2的初始化代码,改为每隔0.5秒将LED1的开关状态翻转。 图片 /* USER CODE BEGIN 0 */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if(htim->Instance == TIM2) //处理TIM2间隔定时中断 { AL_GPIO_TogglePin(GPIOB,GPIO_PIN_9); } if(htim->Instance == TIM3) //处理TIM3间隔定时中断 { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8); } } /* USER CODE END 0 *//* USER CODE BEGIN 2 */ HAL_TIM_Base_Start_IT(&htim2); //启动定时器TIM2 HAL_TIM_Base_Start_IT(&htim3); //启动定时器TIM3 //有IT的代表使能时钟中断 /* USER CODE END 2 */
嵌入式&系统
# 嵌入式
刘航宇
4年前
2
1,324
26
2022-01-17
【3】基于STM32CubeMX-STM32中断系统
目录 中断什么意思 STM32的中断系统 STM32的外部中断 外部中断的程序设计思路 外部中断初始化函数剖析 外部中断服务函数的编写 实训案例:外部中断信号控制LED灯开关 中断什么意思 你打开火,烧上一壶水。然后去洗衣服,在洗衣服的过程中,突然听到水壶发出水开的报警声,这时,你停止洗衣服动作,立即去关掉火,然后将开水灌入暖水瓶中,灌完开水后,你又回去继续洗衣服。这个过程中实际上就发生了一次中断。 如图: 图片 图片 STM32的中断系统 理解中断、中断源、中断向量、中断优先级、中断服务函数…等基础概念。 ARM Cortex M3内核支持256个中断,包括16个内核中断和240个外设中断,拥有256个中断优先级别。 STM32的中断通道可能会由多个中断源共用。这就意味着,某一个中断服务函数也可能被多个中断源所共用。所以,在中断服务函数的入口处,需要有一个判断机制,用以辨别是那个中断触发了中断。 STM32微处理器的内核中有一个NVIC(嵌套向量中断控制器)的设备,它对中断进行统一的协调和控制,其中最主要的工作就是控制中断通道的使能和确定中断的优先级。 STM32中有2个优先级的概念:抢占优先级和响应优先级,每个中断都需要指定这两种优先级。 如果两个抢占优先级相同的中断同时到达,NVIC会根据他们的响应优先级高低来决定先处理哪一个。如果两个同时到达的中断的抢占优先级和响应优先级都相等,则根据中断的自然排位顺序来决定响应哪一个。 STM32的外部中断 外部中断EXTI是STM32微处理器实时处理外部事件的一种机制,由于中断请求主要来自GPIO端口的引脚,所以称为外部中断。 STM32F013微处理器有19个能产生事件/中断请求的边沿检测器,每个输入线可以独立地配置成输入类型(脉冲或挂起)和对应的触发事件(上升沿、下降沿或双边沿触发),也可以独立地屏蔽。 EXTI0~EXTI15:GPIO端口引脚。 EXTI16:PVD输出,可编程电压监测。 EXTI17:RTC闹钟。 EXTI18:USB唤醒。 外部中断的程序设计思路 传统STM32外部中断设计步骤 : 【1】将GPIO初始化为输入端口。 【2】配置相关I/O引脚与中断线的映射关系。 【3】设置该I/O引脚对应的中断触发条件。 【4】配置NVIC,并使能中断。 【5】编写中断服务函数。 配置要点提示 引脚设外部中断,上升沿,上拉 图片 使能NVIC 图片 基于STM32CubeMX的外部中断设计步骤: 【1】在STM32CubeMX中指定引脚,配置中断初始化参数。 选择GPIO引脚的功能,设置中断信号触发条件,使能NVIC对应的中断通道。 【2】重写该I/O引脚对应的中断回调函数。 外部中断初始化函数剖析 //外部中断初始化相关的操作在gpio.c文件中的MX_GPIO_Init()函数完成。 void MX_GPIO_Init(void) { /*===================== 此处省略无关代码。 ======================*/ /* EXTI interrupt init 外部中断初始化*/ HAL_NVIC_SetPriority(EXTI9_5_IRQn, 0, 0); //设置EXIT9~EXIT5中断的优先级 HAL_NVIC_EnableIRQ(EXTI9_5_IRQn); //使能EXIT9~EXIT5中断通道 HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0); HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); }外部中断服务函数的编写 图片 实训案例:外部中断信号控制LED灯开关 在XMF07A或XMF07C开发板上, 利用STM32CubeMX和Keil5协同开发, 完成以下的功能: 【1】将KEY2,即PC13设置为外部中断输入,下降沿触发。在中断服务函数中,切换LED1的开关状态。 【2】将KEY4,即PB5设置为外部中断输入,上升沿触发。在中断服务函 数中,切换LED2的开关状态。 图片 //外部中断的初始化函数由STM32CubeMX辅助生成,用户只需要重写中断回调函数。 /* USER CODE BEGIN 0 */ void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if(GPIO_Pin == GPIO_PIN_13) { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9); } if(GPIO_Pin == GPIO_PIN_5) { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8); } } /* USER CODE END 0 */
嵌入式&系统
# 嵌入式
刘航宇
4年前
0
1,141
15
2022-01-17
【2】基于STM32CubeMX-STM32按键开发
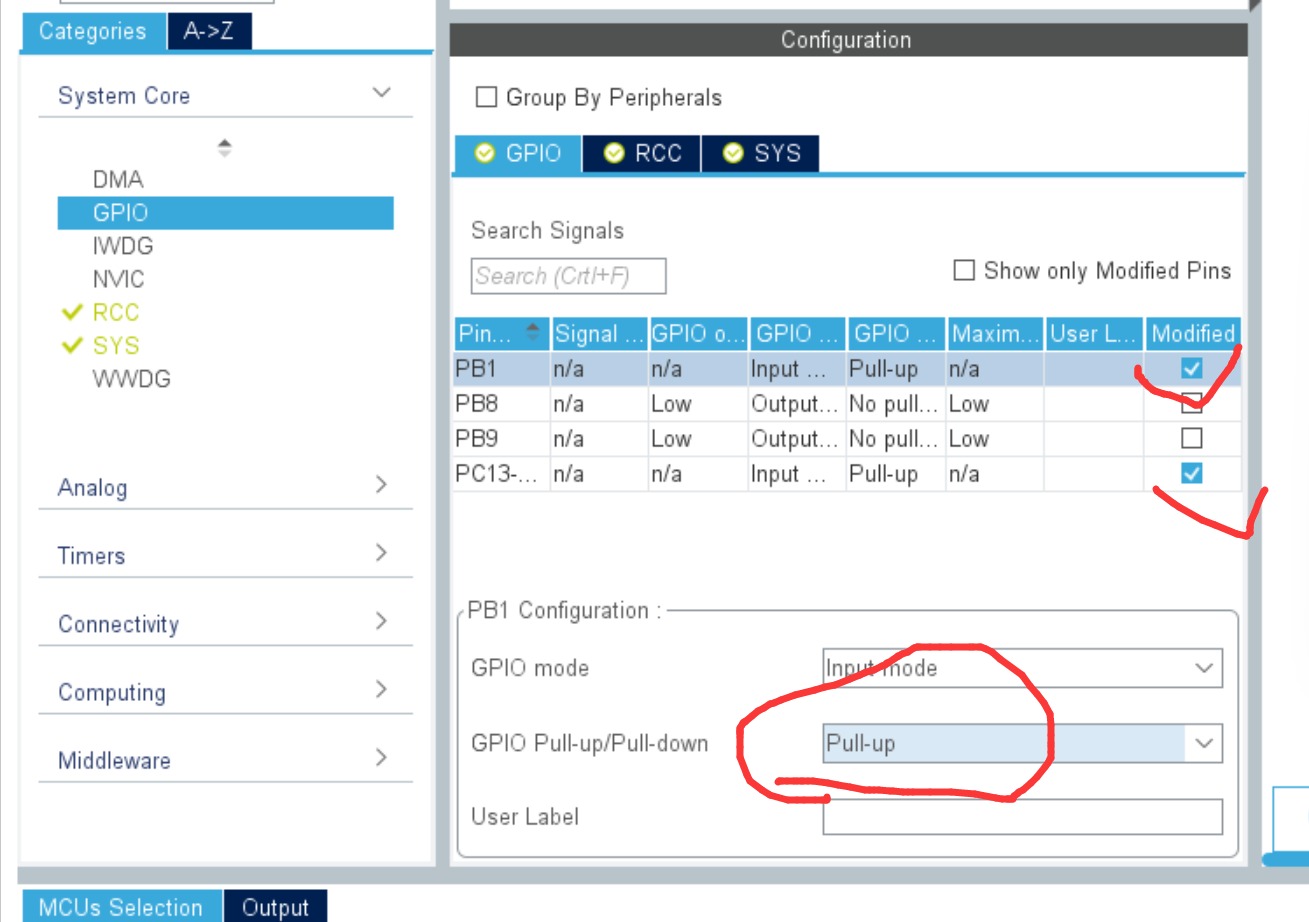
目录 按键扫描的基本原理 GPIO输入电平读取HAL库函数 实训案例:按键控制LED灯开关 按键扫描的基本原理 按键信号是如何识别的? 一般来说,按键的两个引脚的一端通过电阻上拉到高电平,另一端则接地。 在没有按键按下的时候,输入引脚为高电平,当有按键按下,输入引脚则为低电平。通过反复读取按键输入引脚的信号,然后识别高低电平来判断是否有按键触发。 为什么去抖动? 按键的输入引脚有低电平产生不代表一定是有按键按下,也许是干扰信号 , 因此,需要通过去抖动处理,将这些干扰信号过滤,从而获得真实的按键触发信号。 如何去抖动? 首次检测到按键输入引脚有低电平后,稍作延时,再次读取该引脚,如还是低电平,则确认为按键触发信号;否则,判断为干扰信号,不予处理。 GPIO输入电平读取HAL库函数 GPIO_PinState HAL_GPIO_ReadPin( GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 参数1:GPIOx,端口号,如:GPIOB,GPIOF。 参数2:GPIO_Pin,引脚号,如:GPIO_PIN_9,GPIO_PIN_12。 返回值:GPIO_PinState,引脚的电平状态。 应用举例:判断PC13引脚的输入信号,若为高电平,则将PB9引脚控制的LED灯的开关状态切换。 if(HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_13) == GPIO_PIN_SET) { HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_9); }实训案例:按键控制LED灯开关 要点提示配置输入引脚时候注意是否存在上拉 图片 在XMF07A或XMF07C开发板上, 利用STM32CubeMX和Keil5协同开发, 完成以下的功能: 【1】按下KEY2按键,切换LED1的开关状态。 【2】按下KEY3按键,松开后,切换LED2的开关状态。 【3】按下KEY4按键,把点亮的LED灯全部关闭。 图片 #define KEY2 HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13) #define KEY3 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) #define KEY4 HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5)void Scan_Keys() { if(KEY2 == GPIO_PIN_RESET) { HAL_Delay(5); if(KEY2 == GPIO_PIN_RESET) { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9); while(KEY2 == GPIO_PIN_RESET); } } if(KEY3 == RESET) { HAL_Delay(5); if(KEY3 == RESET) { while(KEY3 == RESET); HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8); } } if(KEY4 == 0) { HAL_Delay(5); if(KEY4 == 0) { HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9|GPIO_PIN_8,GPIO_PIN_RESET); while(KEY2 == 0); } } }/* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { Scan_Keys(); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */
嵌入式&系统
# 嵌入式
刘航宇
4年前
9
2,434
91
2022-01-16
【1】基于STM32CubeMX-STM32GPIO端口开发
目录 STM32CubeMX的声明 protuesSTM32仿真开发板下载 STM32的GPIO端口知识要点 GPIO电平输出HAL库函数 GPIO电平翻转HAL库函数 GPIO初始化函数源码剖析 实训案例:基于STM32CubeMX的跑马灯 仿真开发实例 STM32CubeMX的声明 【1】STM32CubeMX 是一个代码辅助生成工具,在生成工程代码的同时,根据你的功能选择和配置帮你做了必要的初始化,这也就意味着你不再需要对底层的特殊功能寄存器进行初 始化配置,但是不代表你就可以不去学习 STM32 的基本知识和各个外设的工作原理与参数 特性等。 【2】虽然不再要求你去了解 STM32 底层寄存器的定义,但却要求你要了解由 STM32CubeMX生产的代码内在的逻辑联系以及 HAL 库中的常用函数原型与使用。 【3】STM32CubeMX 的最大好处就是,使开发流程、文件结构、库函数等标准化 protuesSTM32仿真开发板下载 protues STM32C8开发板 下载地址:https://wwu.lanzoub.com/ixmmx04hidud 提取码: STM32的GPIO端口知识要点 GPIO:General Purpose Input & Output STM32芯片最拥有GPIOA、GPIOB…GPIOG等7组端口,每组端口最多拥有Pin0、Pin1…Pin15共16个引脚。 STM32的每个I/O端口都可以自由编程,但I/O端口寄存器必须按32位字被访问。STM32的每个I/O端口都由7个寄存器来控制。 STM32的GPIO端口可以由软件配置成8种模式: 推挽输出、开漏输出、推挽式复用功能、开漏式复用功能; 模拟输入、浮空输入、下拉输入、上拉输入。 GPIO电平输出HAL库函数 void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState); 参数1:GPIOx,端口号,如:GPIOB,GPIOF。 参数2:GPIO_Pin,引脚号,如:GPIO_PIN_9,GPIO_PIN_12。 参数3:PinState,引脚输出状态。高电平----GPIO_PIN_SET;低电平----GPIO_PIN_RESET。 返回值:void,空。 应用举例:向PB8引脚输出高电平。 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);GPIO电平翻转HAL库函数 void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); 参数1:GPIOx,端口号,如:GPIOB,GPIOF。 参数2:GPIO_Pin,引脚号,如:GPIO_PIN_9,GPIO_PIN_12。 返回值:void,空。 应用举例:将PA3引脚输出电平翻转。 HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_3);GPIO初始化函数源码剖析 void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /* GPIO端口时钟使能 */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); /*配置GPIO端口引脚的初始化输出电平 */ HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8|GPIO_PIN_9, GPIO_PIN_RESET); /*配置GPIO端口输入引脚 : PC13 */ GPIO_InitStruct.Pin = GPIO_PIN_13; //GPIO端口的引脚号是:13 GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //GPIO的模式是:输入 GPIO_InitStruct.Pull = GPIO_NOPULL; //没有上拉 HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); //将参数结构设置到GPIOC端口 /*配置GPIO端口输出引脚 : PB8 PB9 */ GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9; //GPIO端口的引脚号是:8和9 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //GPIO的模式是:输出 GPIO_InitStruct.Pull = GPIO_NOPULL; //没有上拉 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; //GPIO的输出速度是:非常低速 HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); //将参数结构设置到GPIOB端口 }实训案例:基于STM32CubeMX的跑马灯 在XMF07A或XMF07C开发板上,利用STM32CubeMX对STM32芯片的LED控制引脚进行配置并快速生产项目,在Keil5中进行代码编写,实现跑马灯功能,即:LED1灯亮,过一会,LED2灯亮,过一会,LED1灯熄灭,过一会,LED2灯熄灭….如此循环。 XMF07C开发板:STM32L151C8T6 (电路功能兼容物联网国赛设备) XMF07A开发板:STM32F103C8T6 图片 /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET); //向PB9输出高电平,点亮LED1灯 HAL_Delay(500); //延时500ms HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET); //向PB9输出低电平,熄灭LED1灯 HAL_Delay(500); //延时500ms HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9); //用翻转电平的方式,实现LED1灯的点亮与熄灭 HAL_Delay(500); //延时500ms HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_8); //用翻转电平的方式,实现LED2灯的点亮与熄灭 HAL_Delay(500); //延时500ms /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */仿真开发实例 原理图: 图片 1.新建CubeMX工程 选择对应的MCU,在proteus8中支持STM32F103的几款muc,这里我们选择STM32R6 图片 设置下载方式 图片 配置LED灯的GPIO l1p0om1l.png图片 配置时钟树 l1p0ownv.png图片 选择keil5工程(或者其他工程) l1p0pb0l.png图片 勾选此处可以使得每个初始化的外设有独立的.c和.h l1p0ptxo.png图片 生成MDK工程 l1p0ro0x.png图片 添加LED闪烁的代码,并编译生成.hex文件 HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_5); HAL_Delay(0XFF)l1p0sq2c.png图片 将hex文件下载到proteus8中去 l1p0t26z.png图片 此时仿真会报错,原因是电源为接入,只需要将电源接入即可 l1p0tjr9.png图片 此处VDDA,VSSA分别加入到电网VCC与GND中,详细可以百度 l1p0tpli.png图片 最后,就可以看到有一个LED灯反复交替闪烁! l1p0u3mg.png图片
嵌入式&系统
# 嵌入式
刘航宇
4年前
8
6,795
118
上一页
1
2
3
下一页