首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
19,247 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
10,175 阅读
3
【高数】形心计算公式讲解大全
8,771 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,473 阅读
5
Vivado-FPGA Verilog烧写固化教程
6,876 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
ASIC/FPGA(共28篇)
找到
28
篇与
ASIC/FPGA
相关的结果
- 第 3 页
Verilog实现FIFO的设计
FIFO(First In First Out)是异步数据传输时经常使用的存储器。该存储器的特点是数据先进先出(后进后出)。其实,多位宽数据的异步传输问题,无论是从快时钟到慢时钟域,还是从慢时钟到快时钟域,都可以使用 FIFO 处理。 完整的 FIFO 设计见附件,包括输入数据位宽小于输出数据位宽时的异步设计和仿真。 源代码FIFO.zip 下载地址:https://wwu.lanzoub.com/iIdvu0am46cf 提取码: 目录 FIFO 原理工作流程 读写时刻 读空状态 写满状态 FIFO 设计设计要求 双口 RAM 设计 计数器设计 FIFO 设计FIFO 调用 testbench 仿真分析 FIFO 原理 工作流程 复位之后,在写时钟和状态信号的控制下,数据写入 FIFO 中。RAM 的写地址从 0 开始,每写一次数据写地址指针加一,指向下一个存储单元。当 FIFO 写满后,数据将不能再写入,否则数据会因覆盖而丢失。 FIFO 数据为非空、或满状态时,在读时钟和状态信号的控制下,可以将数据从 FIFO 中读出。RAM 的读地址从 0 开始,每读一次数据读地址指针加一,指向下一个存储单元。当 FIFO 读空后,就不能再读数据,否则读出的数据将是错误的。 FIFO 的存储结构为双口 RAM,所以允许读写同时进行。典型异步 FIFO 结构图如下所示。端口及内部信号将在代码编写时进行说明。 图片 读写时刻 关于写时刻,只要 FIFO 中数据为非满状态,就可以进行写操作;如果 FIFO 为满状态,则禁止再写数据。 关于读时刻,只要 FIFO 中数据为非空状态,就可以进行读操作;如果 FIFO 为空状态,则禁止再读数据。 不管怎样,一段正常读写 FIFO 的时间段,如果读写同时进行,则要求写 FIFO 速率不能大于读速率。 读空状态 开始复位时,FIFO 没有数据,空状态信号是有效的。当 FIFO 中被写入数据后,空状态信号拉低无效。当读数据地址追赶上写地址,即读写地址都相等时,FIFO 为空状态。 因为是异步 FIFO,所以读写地址进行比较时,需要同步打拍逻辑,就需要耗费一定的时间。所以空状态的指示信号不是实时的,会有一定的延时。如果在这段延迟时间内又有新的数据写入 FIFO,就会出现空状态指示信号有效,但是 FIFO 中其实存在数据的现象。 严格来讲该空状态指示是错误的。但是产生空状态的意义在于防止读操作对空状态的 FIFO 进行数据读取。产生空状态信号时,实际 FIFO 中有数据,相当于提前判断了空状态信号,此时不再进行读 FIFO 数据操作也是安全的。所以,该设计从应用上来说是没有问题的。 写满状态 开始复位时,FIFO 没有数据,满信号是无效的。当 FIFO 中被写入数据后,此时读操作不进行或读速率相对较慢,只要写数据地址超过读数据地址一个 FIFO 深度时,便会产生满状态信号。此时写地址和读地址也是相等的,但是意义是不一样的。 图片 此时经常使用多余的 1bit 分别当做读写地址的拓展位,来区分读写地址相同的时候,FIFO 的状态是空还是满状态。当读写地址与拓展位均相同的时候,表明读写数据的数量是一致的,则此时 FIFO 是空状态。如果读写地址相同,拓展位为相反数,表明写数据的数量已经超过读数据数量的一个 FIFO 深度了,此时 FIFO 是满状态。当然,此条件成立的前提是空状态禁止读操作、满状态禁止写操作。 同理,由于异步延迟逻辑的存在,满状态信号也不是实时的。但是也相当于提前判断了满状态信号,此时不再进行写 FIFO 操作也不会影响应用的正确性。 FIFO 设计 设计要求 为设计应用于各种场景的 FIFO,这里对设计提出如下要求: (1) FIFO 深度、宽度参数化,输出空、满状态信号,并输出一个可配置的满状态信号。当 FIFO 内部数据达到设置的参数数量时,拉高该信号。 (2) 输入数据和输出数据位宽可以不一致,但要保证写数据、写地址位宽与读数据、读地址位宽的一致性。例如写数据位宽 8bit,写地址位宽为 6bit(64 个数据)。如果输出数据位宽要求 32bit,则输出地址位宽应该为 4bit(16 个数据)。 (3) FIFO 是异步的,即读写控制信号来自不同的时钟域。输出空、满状态信号之前,读写地址信号要用格雷码做同步处理,通过减少多位宽信号的翻转来减少打拍法同步时数据的传输错误。 格雷码与二进制之间的转换如下图所示。 图片 双口 RAM 设计 RAM 端口参数可配置,读写位宽可以不一致。建议 memory 数组定义时,以长位宽地址、短位宽数据的参数为参考,方便数组变量进行选择访问。 Verilog 描述如下。 module ramdp #( parameter AWI = 5 , parameter AWO = 7 , parameter DWI = 64 , parameter DWO = 16 ) ( input CLK_WR , //写时钟 input WR_EN , //写使能 input [AWI-1:0] ADDR_WR ,//写地址 input [DWI-1:0] D , //写数据 input CLK_RD , //读时钟 input RD_EN , //读使能 input [AWO-1:0] ADDR_RD ,//读地址 output reg [DWO-1:0] Q //读数据 ); //输出位宽大于输入位宽,求取扩大的倍数及对应的位数 parameter EXTENT = DWO/DWI ; parameter EXTENT_BIT = AWI-AWO > 0 ? AWI-AWO : 'b1 ; //输入位宽大于输出位宽,求取缩小的倍数及对应的位数 parameter SHRINK = DWI/DWO ; parameter SHRINK_BIT = AWO-AWI > 0 ? AWO-AWI : 'b1; genvar i ; generate //数据位宽展宽(地址位宽缩小) if (DWO >= DWI) begin //写逻辑,每时钟写一次 reg [DWI-1:0] mem [(1<<AWI)-1 : 0] ; always @(posedge CLK_WR) begin if (WR_EN) begin mem[ADDR_WR] <= D ; end end //读逻辑,每时钟读 4 次 for (i=0; i<EXTENT; i=i+1) begin always @(posedge CLK_RD) begin if (RD_EN) begin Q[(i+1)*DWI-1: i*DWI] <= mem[(ADDR_RD*EXTENT) + i ] ; end end end end //================================================= //数据位宽缩小(地址位宽展宽) else begin //写逻辑,每时钟写 4 次 reg [DWO-1:0] mem [(1<<AWO)-1 : 0] ; for (i=0; i<SHRINK; i=i+1) begin always @(posedge CLK_WR) begin if (WR_EN) begin mem[(ADDR_WR*SHRINK)+i] <= D[(i+1)*DWO -1: i*DWO] ; end end end //读逻辑,每时钟读 1 次 always @(posedge CLK_RD) begin if (RD_EN) begin Q <= mem[ADDR_RD] ; end end end endgenerate endmodule计数器设计 计数器用于产生读写地址信息,位宽可配置,不需要设置结束值,让其溢出后自动重新计数即可。Verilg 描述如下。 module ccnt #(parameter W ) ( input rstn , input clk , input en , output [W-1:0] count ); reg [W-1:0] count_r ; always @(posedge clk or negedge rstn) begin if (!rstn) begin count_r <= 'b0 ; end else if (en) begin count_r <= count_r + 1'b1 ; end end assign count = count_r ; endmoduleFIFO 设计 该模块为 FIFO 的主体部分,产生读写控制逻辑,并产生空、满、可编程满状态信号。 鉴于篇幅原因,这里只给出读数据位宽大于写数据位宽的逻辑代码,写数据位宽大于读数据位宽的代码描述详见附件。 module fifo #( parameter AWI = 5 , parameter AWO = 3 , parameter DWI = 4 , parameter DWO = 16 , parameter PROG_DEPTH = 16) //可设置深度 ( input rstn, //读写使用一个复位 input wclk, //写时钟 input winc, //写使能 input [DWI-1: 0] wdata, //写数据 input rclk, //读时钟 input rinc, //读使能 output [DWO-1 : 0] rdata, //读数据 output wfull, //写满标志 output rempty, //读空标志 output prog_full //可编程满标志 ); //输出位宽大于输入位宽,求取扩大的倍数及对应的位数 parameter EXTENT = DWO/DWI ; parameter EXTENT_BIT = AWI-AWO ; //输出位宽小于输入位宽,求取缩小的倍数及对应的位数 parameter SHRINK = DWI/DWO ; parameter SHRINK_BIT = AWO-AWI ; //==================== push/wr counter =============== wire [AWI-1:0] waddr ; wire wover_flag ; //多使用一位做写地址拓展 ccnt #(.W(AWI+1)) u_push_cnt( .rstn (rstn), .clk (wclk), .en (winc && !wfull), //full 时禁止写 .count ({wover_flag, waddr}) ); //============== pop/rd counter =================== wire [AWO-1:0] raddr ; wire rover_flag ; //多使用一位做读地址拓展 ccnt #(.W(AWO+1)) u_pop_cnt( .rstn (rstn), .clk (rclk), .en (rinc & !rempty), //empyt 时禁止读 .count ({rover_flag, raddr}) ); //============================================== //窄数据进,宽数据出 generate if (DWO >= DWI) begin : EXTENT_WIDTH //格雷码转换 wire [AWI:0] wptr = ({wover_flag, waddr}>>1) ^ ({wover_flag, waddr}) ; //将写数据指针同步到读时钟域 reg [AWI:0] rq2_wptr_r0 ; reg [AWI:0] rq2_wptr_r1 ; always @(posedge rclk or negedge rstn) begin if (!rstn) begin rq2_wptr_r0 <= 'b0 ; rq2_wptr_r1 <= 'b0 ; end else begin rq2_wptr_r0 <= wptr ; rq2_wptr_r1 <= rq2_wptr_r0 ; end end //格雷码转换 wire [AWI-1:0] raddr_ex = raddr << EXTENT_BIT ; wire [AWI:0] rptr = ({rover_flag, raddr_ex}>>1) ^ ({rover_flag, raddr_ex}) ; //将读数据指针同步到写时钟域 reg [AWI:0] wq2_rptr_r0 ; reg [AWI:0] wq2_rptr_r1 ; always @(posedge wclk or negedge rstn) begin if (!rstn) begin wq2_rptr_r0 <= 'b0 ; wq2_rptr_r1 <= 'b0 ; end else begin wq2_rptr_r0 <= rptr ; wq2_rptr_r1 <= wq2_rptr_r0 ; end end //格雷码反解码 //如果只需要空、满状态信号,则不需要反解码 //因为可编程满状态信号的存在,地址反解码后便于比较 reg [AWI:0] wq2_rptr_decode ; reg [AWI:0] rq2_wptr_decode ; integer i ; always @(*) begin wq2_rptr_decode[AWI] = wq2_rptr_r1[AWI]; for (i=AWI-1; i>=0; i=i-1) begin wq2_rptr_decode[i] = wq2_rptr_decode[i+1] ^ wq2_rptr_r1[i] ; end end always @(*) begin rq2_wptr_decode[AWI] = rq2_wptr_r1[AWI]; for (i=AWI-1; i>=0; i=i-1) begin rq2_wptr_decode[i] = rq2_wptr_decode[i+1] ^ rq2_wptr_r1[i] ; end end //读写地址、拓展位完全相同是,为空状态 assign rempty = (rover_flag == rq2_wptr_decode[AWI]) && (raddr_ex >= rq2_wptr_decode[AWI-1:0]); //读写地址相同、拓展位不同,为满状态 assign wfull = (wover_flag != wq2_rptr_decode[AWI]) && (waddr >= wq2_rptr_decode[AWI-1:0]) ; //拓展位一样时,写地址必然不小于读地址 //拓展位不同时,写地址部分比如小于读地址,实际写地址要增加一个FIFO深度 assign prog_full = (wover_flag == wq2_rptr_decode[AWI]) ? waddr - wq2_rptr_decode[AWI-1:0] >= PROG_DEPTH-1 : waddr + (1<<AWI) - wq2_rptr_decode[AWI-1:0] >= PROG_DEPTH-1; //双口 ram 例化 ramdp #( .AWI (AWI), .AWO (AWO), .DWI (DWI), .DWO (DWO)) u_ramdp ( .CLK_WR (wclk), .WR_EN (winc & !wfull), //写满时禁止写 .ADDR_WR (waddr), .D (wdata[DWI-1:0]), .CLK_RD (rclk), .RD_EN (rinc & !rempty), //读空时禁止读 .ADDR_RD (raddr), .Q (rdata[DWO-1:0]) ); end //============================================== //big in and small out /* else begin: SHRINK_WIDTH …… end */ endgenerate endmoduleFIFO 调用 下面可以调用设计的 FIFO,完成多位宽数据传输的异步处理。 写数据位宽为 4bit,写深度为 32。 读数据位宽为 16bit,读深度为 8,可配置 full 深度为 16。 module fifo_s2b( input rstn, input [4-1: 0] din, //异步写数据 input din_clk, //异步写时钟 input din_en, //异步写使能 output [16-1 : 0] dout, //同步后数据 input dout_clk, //同步使用时钟 input dout_en ); //同步数据使能 wire fifo_empty, fifo_full, prog_full ; wire rd_en_wir ; wire [15:0] dout_wir ; //读空状态时禁止读,否则一直读 assign rd_en_wir = fifo_empty ? 1'b0 : 1'b1 ; fifo #(.AWI(5), .AWO(3), .DWI(4), .DWO(16), .PROG_DEPTH(16)) u_buf_s2b( .rstn (rstn), .wclk (din_clk), .winc (din_en), .wdata (din), .rclk (dout_clk), .rinc (rd_en_wir), .rdata (dout_wir), .wfull (fifo_full), .rempty (fifo_empty), .prog_full (prog_full)); //缓存同步后的数据和使能 reg dout_en_r ; always @(posedge dout_clk or negedge rstn) begin if (!rstn) begin dout_en_r <= 1'b0 ; end else begin dout_en_r <= rd_en_wir ; end end assign dout = dout_wir ; assign dout_en = dout_en_r ; endmoduletestbench `timescale 1ns/1ns `define SMALL2BIG module test ; `ifdef SMALL2BIG reg rstn ; reg clk_slow, clk_fast ; reg [3:0] din ; reg din_en ; wire [15:0] dout ; wire dout_en ; //reset initial begin clk_slow = 0 ; clk_fast = 0 ; rstn = 0 ; #50 rstn = 1 ; end //读时钟 clock_slow 较快于写时钟 clk_fast 的 1/4 //保证读数据稍快于写数据 parameter CYCLE_WR = 40 ; always #(CYCLE_WR/2/4) clk_fast = ~clk_fast ; always #(CYCLE_WR/2-1) clk_slow = ~clk_slow ; //data generate initial begin din = 16'h4321 ; din_en = 0 ; wait (rstn) ; //(1) 测试 full、prog_full、empyt 信号 force test.u_data_buf2.u_buf_s2b.rinc = 1'b0 ; repeat(32) begin @(negedge clk_fast) ; din_en = 1'b1 ; din = {$random()} % 16; end @(negedge clk_fast) din_en = 1'b0 ; //(2) 测试数据读写 #500 ; rstn = 0 ; #10 rstn = 1 ; release test.u_data_buf2.u_buf_s2b.rinc; repeat(100) begin @(negedge clk_fast) ; din_en = 1'b1 ; din = {$random()} % 16; end //(3) 停止读取再一次测试 empyt、full、prog_full 信号 force test.u_data_buf2.u_buf_s2b.rinc = 1'b0 ; repeat(18) begin @(negedge clk_fast) ; din_en = 1'b1 ; din = {$random()} % 16; end end fifo_s2b u_data_buf2( .rstn (rstn), .din (din), .din_clk (clk_fast), .din_en (din_en), .dout (dout), .dout_clk (clk_slow), .dout_en (dout_en)); `else `endif //stop sim initial begin forever begin #100; if ($time >= 5000) $finish ; end end endmodule仿真分析 根据 testbench 中的 3 步测试激励,分析如下: 测试 (1) : FIFO 端口及一些内部信号时序结果如下。 由图可知,FIFO 内部开始写数据,空状态信号拉低之前有一段时间延迟,这是同步读写地址信息导致的。 由于此时没有进行读 FIFO 操作,相对于写数据操作,full 和 prog_full 拉高几乎没有延迟。 图片 测试 (2) : FIFO 同时进行读写时,数字顶层异步处理模块的端口信号如下所示,两图分别显示了数据开始传输、结束传输时的读取过程。 由图可知,数据在开始、末尾均能正确传输,完成了不同时钟域之间多位宽数据的异步处理。 图片 图片 测试 (3) :整个 FIFO 读写行为及读停止的时序仿真图如下所示。 由图可知,读写同时进行时,读空状态信号 rempty 会拉低,表明 FIFO 中有数据写入。一方面读数据速率稍高于写速率,且数据之间传输会有延迟,所以中间过程中 rempty 会有拉高的行为。 读写过程中,full 与 prog_full 信号一直为低,说明 FIFO 中数据并没有到达一定的数量。当停止读操作后,两个 full 信号不久便拉高,表明 FIFO 已满。仔细对比读写地址信息,FIFO 行为没有问题。 图片
FPGA&ASIC
# ASIC/FPGA
刘航宇
4年前
0
852
2
2022-07-06
【IC设计】数字IC设计流程及学习指南
IC的设计过程可分为两个部分,前端设计(也称逻辑设计)和后端设计(也称物理设计)并没有统一严格的界限,涉及到与工艺有关的设计就是后端设计。 目录 数字IC设计流程1. 规格制定 2. 详细设计 3. HDL编码 4. 仿真验证 5. 逻辑综合――Design Compiler5.1. STA 5.2. 形式验证 技能图解 1.语言 2.基础知识 3.设计工具 4.相关岗位 数字IC设计流程 1. 规格制定 芯片规格,也就像功能列表一样,是客户向芯片设计公司(称为Fabless,无晶圆设计公司)提出的设计要求,包括芯片需要达到的具体功能和性能方面的要求。 2. 详细设计 Fabless根据客户提出的规格要求,拿出设计解决方案和具体实现架构,划分模块功能。目前架构的验证一般基于SystemC语言,对构架模型的仿真可以使用SystemC的仿真工具。其中典型的例子是Synopsys公司的CoCentric和Summit公司的Visual Elite等。 3. HDL编码 使用硬件描述语言(VHDL,Verilog HDL,业界公司一般都是使用后者)将模块功能以代码来描述实现,也就是将实际的硬件电路功能通过HDL语言描述出来,形成RTL(寄存器传输级)代码。 设计输入工具:具有强大的文本编辑功能,多种输入方法(VHDL,Verilog,状态转移图,模块图等),语法模板,语法检查,自动生产代码和文档等功能。如Active-HDL,VisualVHDL/Verilog等。 RTL分析检查工具:Synopsys LEDA 4. 仿真验证 仿真验证就是检验编码设计的正确性,检验的标准就是第一步制定的规格。看设计是否精确地满足了规格中的所有要求。规格是设计正确与否的黄金标准,一切违反,不符合规格要求的,就需要重新修改设计和编码。 设计和仿真验证是反复迭代的过程,直到验证结果显示完全符合规格标准。 仿真验证工具Synopsys的VCS,Mentor ModelSim,Cadence Verilog-XL,Cadence NC-Verilog。 5. 逻辑综合――Design Compiler 仿真验证通过,进行逻辑综合。逻辑综合的结果就是把设计实现的HDL代码翻译成门级网表netlist。综合需要设定约束条件,就是你希望综合出来的电路在面积,时序等目标参数上达到的标准。逻辑综合需要基于特定的综合库,不同的库中,门电路基本标准单元(standard cell)的面积,时序参数是不一样的。所以,选用的综合库不一样,综合出来的电路在时序,面积上是有差异的。 一般来说,综合完成后需要再次做仿真验证(这个也称为后仿真,之前的称为前仿真)逻辑综合工具Synopsys的Design Compiler(DC),Cadence的 PKS,Synplicity的Synplify等。另外,和综合工具配合使用的还有很多其他工具,如静态时间分析工具,等效性检查工具等等。Synopsys公司和Cadence公司都提供完整的工具包。 5.1. STA Static Timing Analysis(STA),静态时序分析,这也属于验证范畴,它主要是在时序上对电路进行验证,检查电路是否存在建立时间(setup time)和保持时间(hold time)的违例(violation)。这个是数字电路基础知识,一个寄存器出现这两个时序违例时,是没有办法正确采样数据和输出数据的,所以以寄存器为基础的数字芯片功能肯定会出现问题。STA工具有Synopsys的Prime Time。 5.2. 形式验证 这也是验证范畴,它是从功能上(STA是时序上)对综合后的网表进行验证。常用的就是等价性检查(Equivalence Check)方法,以功能验证后的HDL设计为参考,对比综合后的网表功能,他们是否在功能上存在等价性。这样做是为了保证在逻辑综合过程中没有改变原先HDL描述的电路功能。形式验证工具有Synopsys的Formality。前端设计的流程暂时写到这里。从设计程度上来讲,前端设计的结果就是得到了芯片的门级网表电路。 技能图解 图片 1.语言 主流的Verilog、VHDL Verilog语言与软件语言最大的区别就是,因为它是用于描述电路的,因此它的写法是非常固定的,因为电路的变化是非常有限的。学习Verilog的时候,很多时候我们并不是在学习这门语言本身,而是学习其对应的电路特征,以及如何对这个电路进行描述。如果心中没有电路,那么你是不可能写好Verilog的。 VHDL语言的严谨性比Verilog要好,不像Verilog中一样存在大量符合语法却永远无法综合的语句。 SpinalHDL、Myhdl等 SpinalHDL和Chisel师承一脉,都是基于Scala来进行电路描述。其本质上仍旧是HDL而非HLS,在设计之前依旧需要有清晰的电路结构,只不过是在电路描述上更加方便和快捷而已。 目前有一些公司已经应用于FPGA设计中,ASIC应用还有待探究。 SpinalHDL资料: https://spinalhdl.github.io/SpinalDoc-RTD/master/index.html SystemVerilog/SystemC : 这两种语言都是为了验证而存在的,掌握基本的验证方法学有助于提高自己的debug效率,SystemVerilog是一种面向对象的语言,其设计的本意是用于搭建验证平台,主流的UVM方法也都是基于SystemVerilog实现的,所以立志成为IC验证工程师的同学,SystemVerilog的深入学习和流行方法论的学习都是必不可少的。 而对于那些只想做IC设计的同学而言,SystemVerilog同样也是值得学习的。且不说本文前面提到的用于提高验证效率的debug方法,即使只是为了做好设计,SystemVerilog也是大有用武之地。很多顶级的IC设计公司内部都开始使用SystemVerilog进行RTL设计了。 由于在SystemVerilog中加入了很多类似always_ff、always_comb等用于显式表明综合电路意图的新语法,代码的可读性更高,综合过程中也减少了歧义,尽可能地保证了综合结果与设计意图的一致性。从另一个角度来说,assertion的加入也极大地提高了代码的debug效率,非常有助于在大规模的数据交互过程中定位到出错的初始点,没有掌握的同学可以多花一些时间学习一下。 -> SV基础知识 脚本语言:Makefile/Perl/Python/Shell Makefile/Perl/Python/Shell都是常用的脚本语言,进行批量修改文本内容,实现自动化操作等,掌握一门得心应手的脚本语言将对工作效率的提升帮助极大。但凡做过一次的事情,就没有必要重复第二次。 -> Perl在IC中的应用 脚本语言:Tcl 在IC设计这个领域中,Tcl是一门非常常见的语言。可以用于描述时序和管脚约束文件,UPF信息,也可以用来搭建简单的工作平台。既是很多EDA工具默认支持的脚本语言,也是这些工具配置和输出的文件格式。因此,能够读懂Tcl,掌握Tcl语言的基本语法,就可以帮助更好的使用EDA工具。 -> 从零开始学Tcl C语言 作为基础语言,在验证时,往往需要用到C写的case; 2.基础知识 数电模电、电路分析、数据结构、计算机体系架构等 AMBA总线 AXI、AHB、APB、CHI、ACE等; -> AMBA总线 高低速接口 PCIE、DMA、DDR、USB、UART、SPI、I2C、MIPI等 -> 总线接口 低功耗设计 动态功耗、静态功耗、常见低功耗设计方法 -> 低功耗设计 静态时序分析 建立时间、保持时间、亚稳态及其解决方法、时序约束 -> 时序约束策略 、亚稳态、 FPGA中的亚稳态 设计方法 乒乓操作、流水线、串并转换、无毛刺切换、状态机等 跨时钟处理:快到慢、慢到快、异步FIFO(FIFO深度计算)等 ->时钟切换电路(Glitch-free clock switching circuit)、异步FIFO、同步FIFO、同步和异步FIFO、FIFO深度计算 3.设计工具 linux系统:linux、shell常见命令 gvim/emac编辑器: 熟练使用Vim/Emacs,用编程的方式来编程,可以提高效率。 版本管理工具:SVN、Git、p4等 版本管理,简而言之,就是一种用于记录和查询文件版本改动的工具; EDA工具 仿真工具:NCVerilog/ VCS/ ModelSim/ iVerilog 以上是比较业界比较主流的仿真工具,其中Icarus Verilog (iVerilog)为开源工具,仿真过程需要了解: 如何指定编译的文件类型; 如何指定编译文件清单; 如何指定索引目录; 如何指定仿真精度; 如何指定临时的宏变量; 如何指定语法检查的严苛等级; 如何混合编译由多种语言写成的工程; 如何调用不同波形生成工具的pli接口; 如何配合SDF反标进行后仿等; -> 芯片后仿及SDF反标、VCS实用技巧、开源verilog仿真工具iverilog+GTKWave 波形查看工具:DVE/ Verdi/ gtkWave 以上是业界比较主流的波形查看工具,所有的波形查看器都必须支持标准波形文件.vcd格式,但是由于.vcd格式的存储性能并不好,冗余信息过多,所以各波形查看工具都纷纷推出了自己支持的波形文件格式,如DVE的.vpd,Verdi的.fsdb,ModelSim的*.wlf; gtkWave也是跨平台的,而且简单易用,支持.vcd标准格式,同时支持高性能压缩格式.lxt和*.fst,gtkWave自带vcd转fst的转换器; 通常几G左右的.vcd格式波形转换为.vpd格式后只有几十MB左右,而转换为.fsdb后通常会更小,因此将标准波形文件.vcd转换为其他压缩格式更加有利于数据备份。 -> fsdb实用技巧、verdi实用技巧 逻辑等效性检查工具:formality-> 形式验证与formality基本流程 从功能上对综合后的网表进行验证,常用的就是等价性检查方法,以功能验证后的HDL设计为参考,对比综合后的网表功能,他们是否在功能上存在等价性。这样做是为了保证在逻辑综合过程中没有改变原先HDL描述的电路功能。 综合工具:dc ->DC综合 逻辑综合就是将HDL代码翻译成门级网表netlist; lint/cdc检查工具:spyglass -> SpyGlass安装教程、spyglass 基础操作、spyglass 常见错误lint 后端:PT、IIC2、innovus等 FPGA综合布线布局工具:synplify/vivado-> ->synplify 基础操作、基于synplify+vivado生成bitfile 其他:VC_static_tools ->VC_static Tools安装教程 4.相关岗位 前端设计 RTL IP设计:从算法协议到RTL coding的能力; SoC设计集成/验证:总线、功耗、系统架构的能力; SOC侧重将IP,模块集成形成一个系统,所以片上互联总线和外设接口是掌握的重点。片内互联总线一般是AMBA总线。外设接口又分为低速接口和高速接口,其中低速接口包括I2C,UART,SPI等,高速接口包括SATA,USB,PCIE,DDR等; 验证 FPGA原型验证:HAPS -> HAPS®-100原型系统、芯片验证技术 |HAPS与高性能ASIC原型验证 UVM验证:SV、UVM主流验证方法学 ->UVM芯片验证 EMU验证:zebu、帕拉丁 -> 芯片验证应用|基于ZeBu平台的虚拟主机应用方案 综合: 逻辑综合就是将HDL代码翻译成门级网表netlist; STA Static Timing Analysis(STA),静态时序分析,它主要是在时序上对电路进行验证,检查电路是否存在建立时间(setup time)和保持时间(hold time)的违例(violation),一个寄存器出现这两个时序违例时,是没有办法正确采样数据和输出数据的,所以以寄存器为基础的数字芯片功能肯定会出现问题。 DFT Design ForTest,可测性设计。芯片内部往往都自带测试电路,DFT的目的就是在设计的时候就考虑将来的测试。DFT的常见方法就是,在设计中插入扫描链,将非扫描单元(如寄存器)变为扫描单元;如bist、Scan Design、JTAG、ATPG等; 后端 物理验证、布线布局、静态时序分析、等价性检查、功耗分析
FPGA&ASIC
# ASIC/FPGA
刘航宇
4年前
0
2,894
9
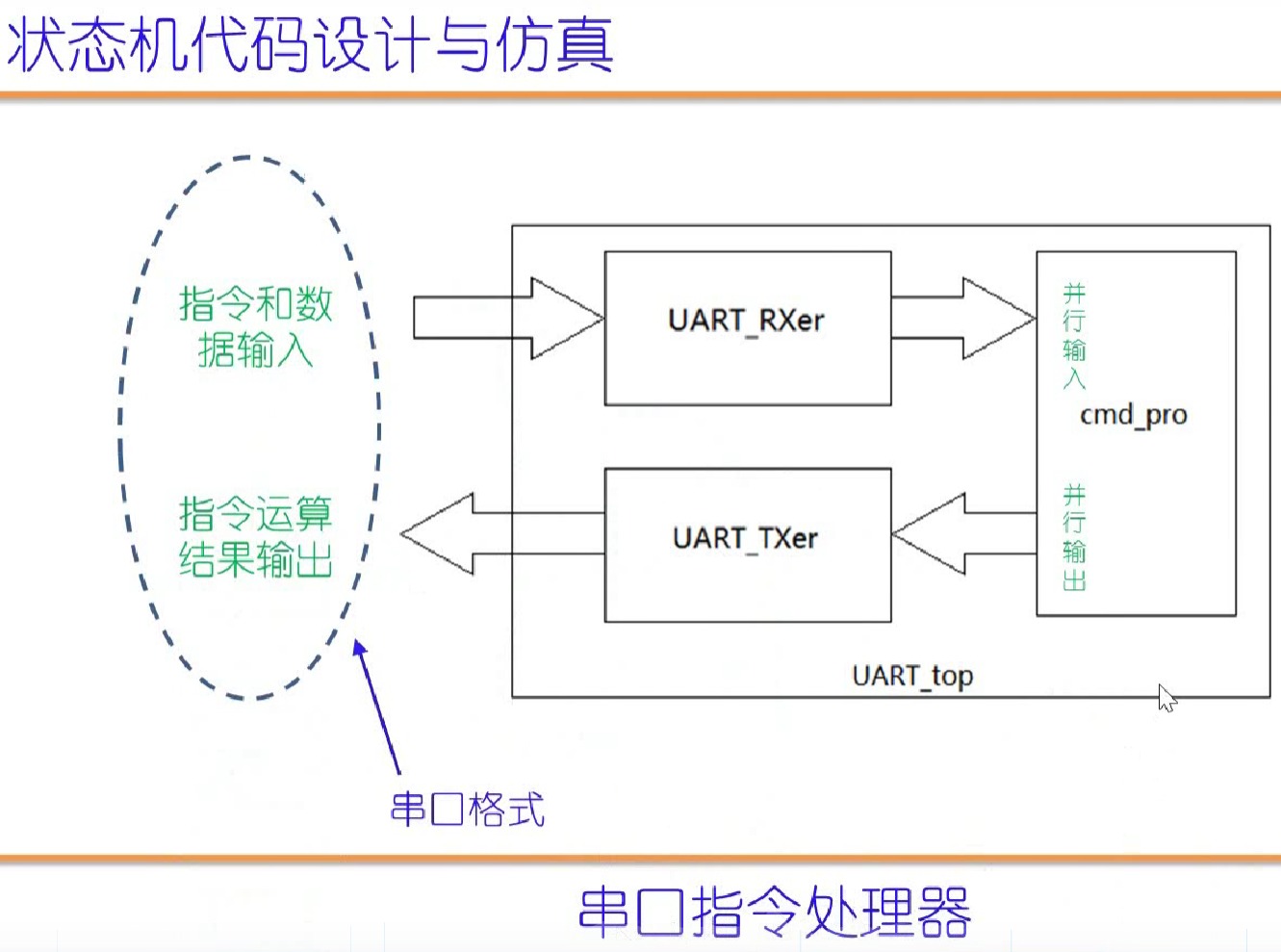
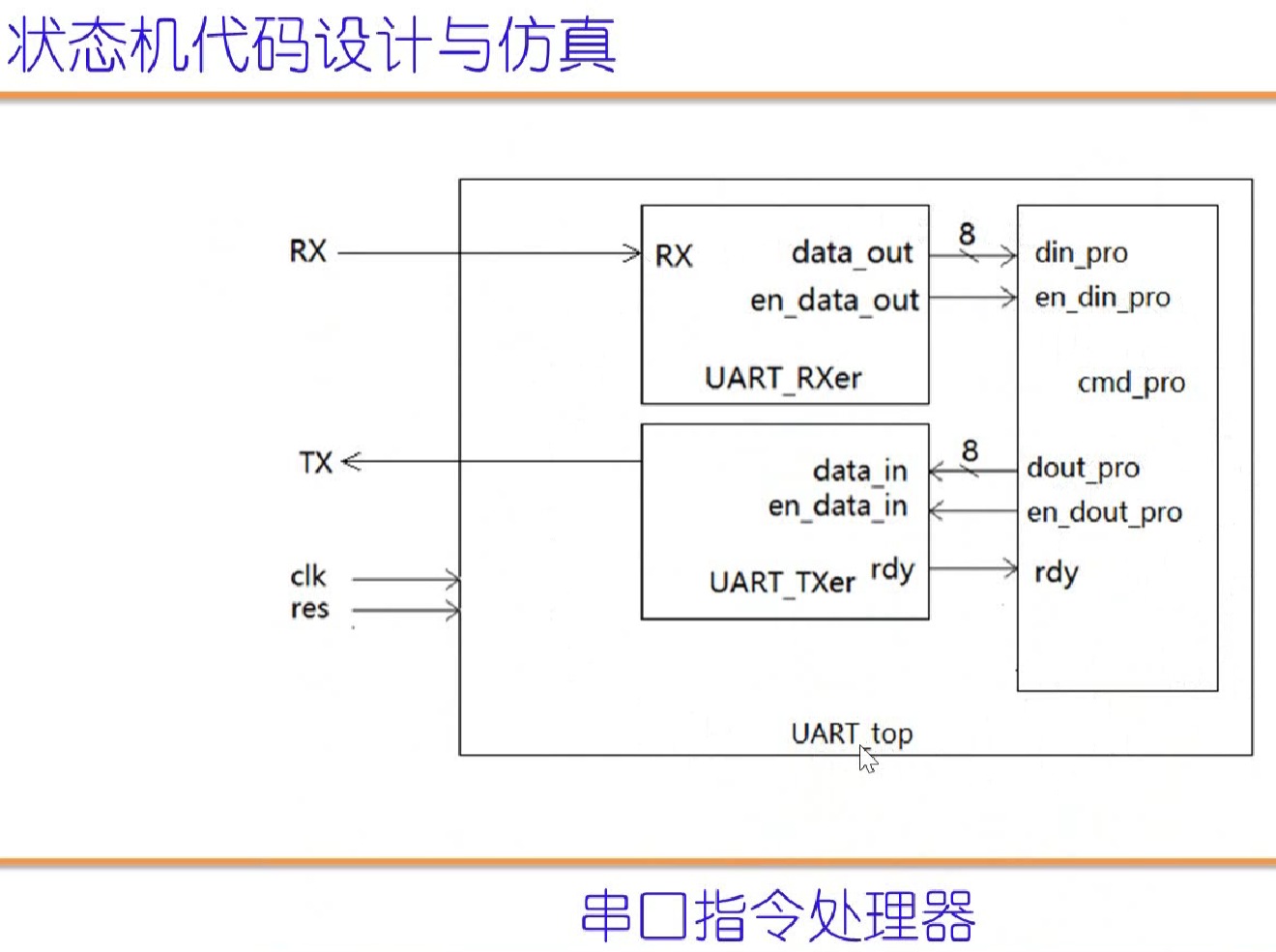
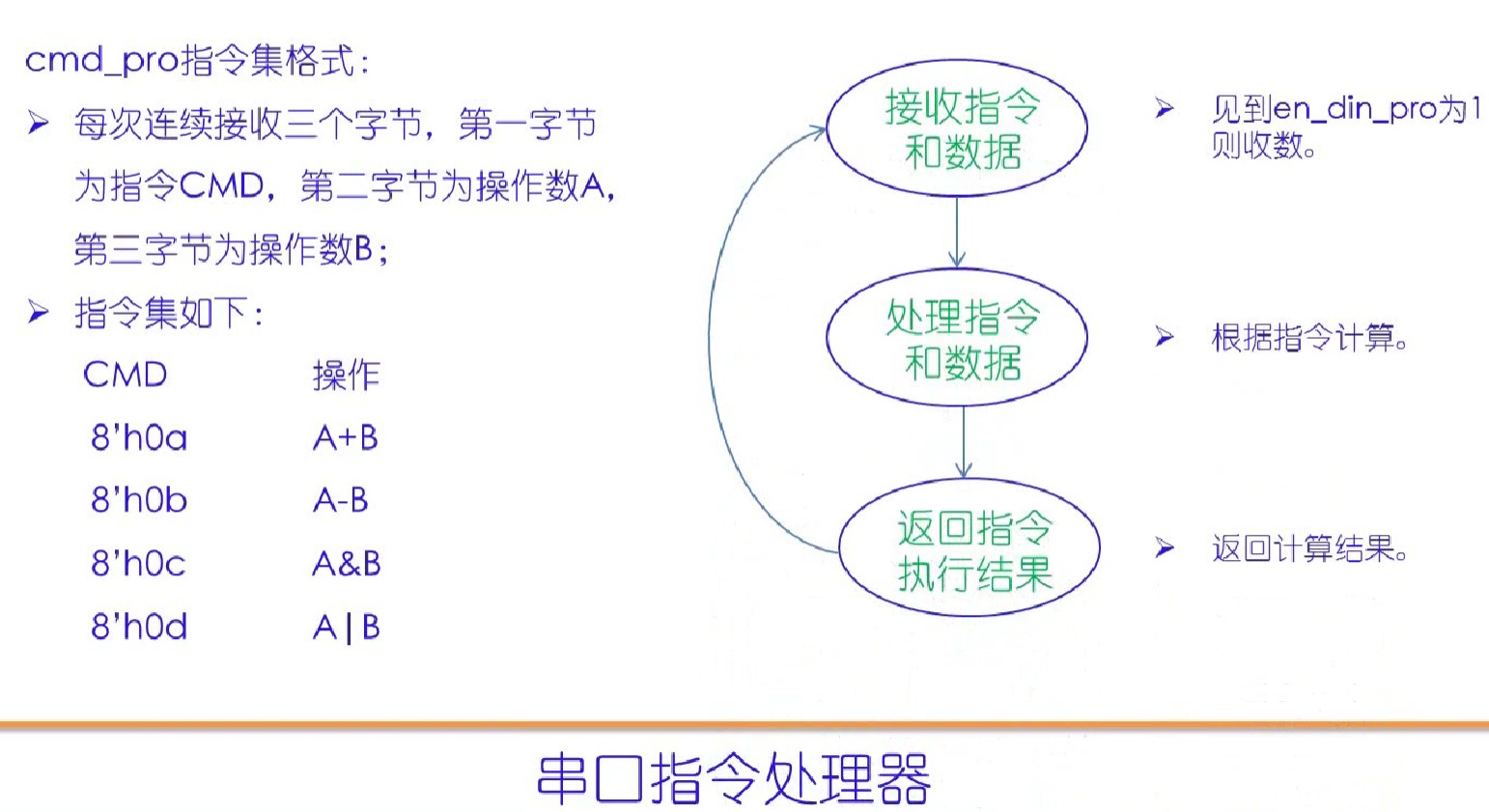
【9】Verilog练习-串口指令处理器
目录 理论: 代码cmd_pro UART_top 现象 理论: 图片 图片 图片 代码 RX、TX需要与之在相同目录下 cmd_pro //指令处理器 `timescale 1ns/10ps module cmd_pro( clk, res, din_pro, en_din_pro, dout_pro, en_dout_pro, rdy ); input clk; input res; input[7:0] din_pro;//指令和数据输入端口; input en_din_pro;//输入使能; output[7:0] dout_pro;//指令执行结果; output en_dout_pro;//指令输出使能; output rdy;//串口发送模块空闲标志,0表示空闲; parameter add_ab=8'h0a; parameter sub_ab=8'h0b; parameter and_ab=8'h0c; parameter or_ab=8'h0d; reg[2:0] state;//主状态机寄存器(2^3个状态); reg[7:0] cmd_reg,A_reg,B_reg;//存放指令、A和B; reg[7:0] dout_pro; reg en_dout_pro; always@(posedge clk or negedge res) if(~res)begin state<=0;cmd_reg<=0;A_reg<=0;B_reg<=0;dout_pro<=0; en_dout_pro<=0; end else begin case(state) 0://等指令; begin en_dout_pro<=0; if(en_din_pro) begin cmd_reg<=din_pro; state<=1; end end 1://收A; begin if(en_din_pro) begin A_reg<=din_pro; state<=2; end end 2://收B; begin if(en_din_pro) begin B_reg<=din_pro; state<=3; end end 3://指令译码和执行 begin state<=4; case(cmd_reg) add_ab: begin dout_pro<=A_reg+B_reg; end sub_ab: begin dout_pro<=A_reg-B_reg; end and_ab: begin dout_pro<=A_reg&B_reg; end or_ab: begin dout_pro<=A_reg|B_reg; end endcase end 4://发送指令执行结果 begin if(~rdy)begin en_dout_pro<=1; state<=0; end end default:// begin state<=0; en_dout_pro<=0; end endcase end endmoduleUART_top //串口指令处理器 `timescale 1ns/10ps module UART_top( clk, res, RX, TX ); input clk; input res; input RX; output TX; wire[7:0] din_pro; wire en_din_pro; wire[7:0] dout_pro; wire en_dout_pro; wire rdy; UART_Rxer UART_Rxer( .clk(clk), .res(res), .RX(RX), .data_out(din_pro), .en_data_out(en_din_pro) ); UART_TXer UART_TXer( .clk(clk), .res(res), .data_in(dout_pro), .en_data_in(en_dout_pro), .TX(TX), .rdy(rdy) ); cmd_pro cmd_pro( .clk(clk), .res(res), .din_pro(din_pro), .en_din_pro(en_din_pro), .dout_pro(dout_pro), .en_dout_pro(en_dout_pro), .rdy(rdy) ); endmodule //-----testbench of UART_top----- module UART_top_tb; reg clk,res; wire RX; wire TX; reg[45:0] RX_send;//里面装有串口字节发送数据 assign RX=RX_send[0];//连接RX; reg[12:0] con; UART_top UART_top( clk, res, RX, TX ); initial begin clk<=0;res<=0;RX_send<={1'b1,8'h09,1'b0,1'b1,8'h06,1'b0,1'b1,8'h0a,1'b0,16'hffff}; con<=0; #17 res<=1; #4000000 $stop; end always #5 clk<=~clk; always@(posedge clk)begin if(con==5000-1)begin con<=0; end else begin con<=con+1; end if(con==0)begin RX_send[44:0]<=RX_send[45:1]; RX_send[45]<=RX_send[0]; end end endmodule现象 图片
FPGA&ASIC
# ASIC/FPGA
刘航宇
4年前
0
354
2
2022-06-21
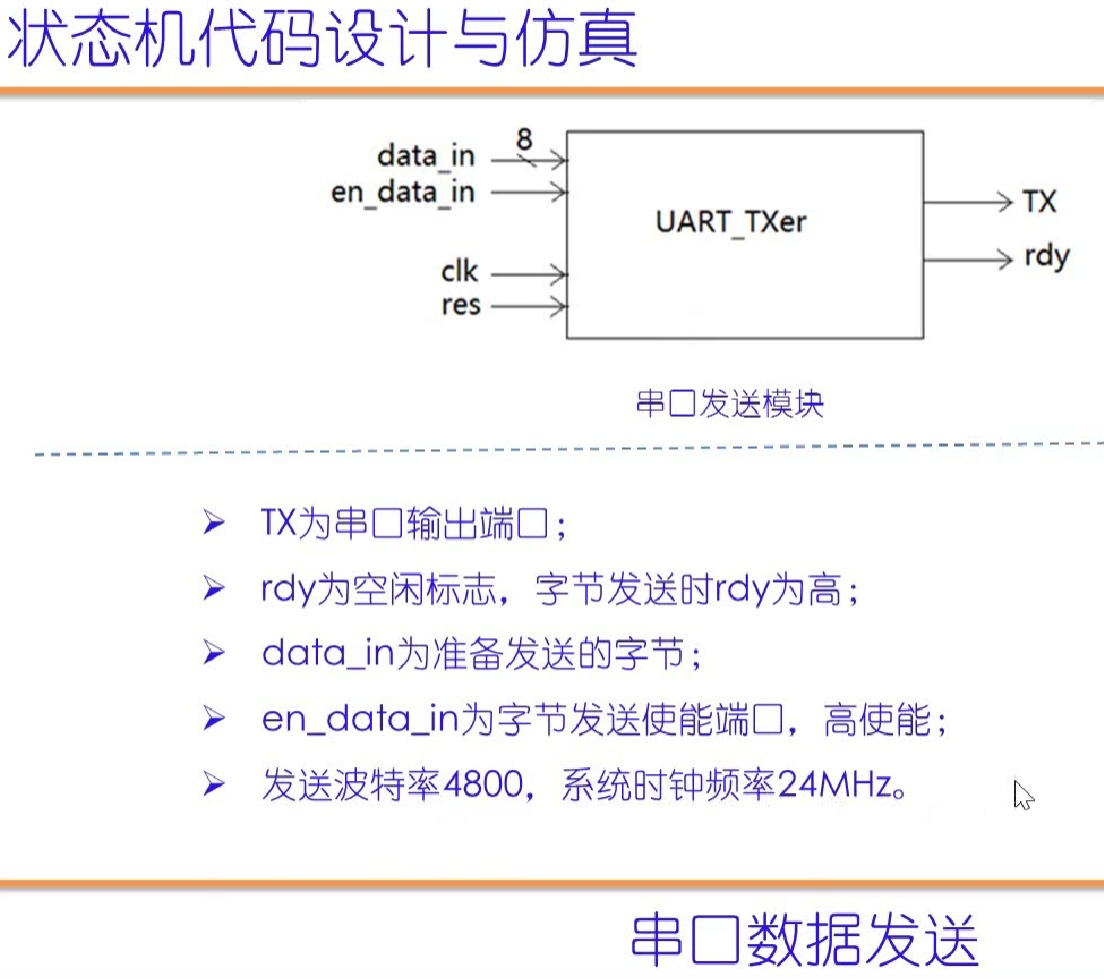
【8】Verilog练习-串口数据发送
理论: 图片 图片 代码: //串口发送模块 `timescale 1ns/10ps module UART_TXer( clk, res, data_in, en_data_in, TX, rdy ); input clk; input res; input[7:0] data_in;//准备发送的数据; input en_data_in;//发送使能; output TX;//输出使能 output rdy;//空闲标志,0表示空闲; reg[3:0] state;//主状态机寄存器; reg[9:0] send_buf;//发送寄存器 assign TX=send_buf[0];//连接TX; reg[9:0] send_flag;//用于判断右移结束; reg[12:0] con;//用于计算波特周期 reg rdy; always@(posedge clk or negedge res) if(~res)begin state<=0;send_buf<=1;con<=0;send_flag<=10'b10_0000_0000;rdy<=0; end else begin case(state) 0://等待使能信号; begin if(en_data_in)begin send_buf={1'b1,data_in,1'b0}; send_flag<=10'b10_0000_0000; rdy<=1; state<=1; end end 1://串口发送,寄存器右移; begin if(con==5000-1)begin con<=0; end else begin con<=con+1; end if(con==5000-1)begin send_buf[8:0]<=send_buf[9:1]; send_flag[8:0]<=send_flag[9:1]; end if(send_flag[0])begin rdy<=0; state<=0; end end endcase end endmodule //----testbench of UART_TXer--- module UART_TXer_tb; reg clk,res; reg[7:0] data_in; reg en_data_in; wire TX; wire rdy; UART_TXer UART_TXer( //同名例化; clk, res, data_in, en_data_in, TX, rdy ); initial begin clk<=0;res<=0;data_in<=8'h7f;en_data_in<=0; #17 res<=1; #30 en_data_in<=1; #10 en_data_in<=0; #10000 $stop; end always #5 clk<=~clk; endmodule结果: 图片
FPGA&ASIC
# ASIC/FPGA
刘航宇
4年前
0
458
3
上一页
1
2
3