首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
18,935 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
9,941 阅读
3
【高数】形心计算公式讲解大全
8,723 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,393 阅读
5
【1】基于STM32CubeMX-STM32GPIO端口开发
6,738 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
📡电子&通信(共112篇)
找到
112
篇与
📡电子&通信
相关的结果
- 第 7 页
2021-06-16
电子测量技术概念复习提纲
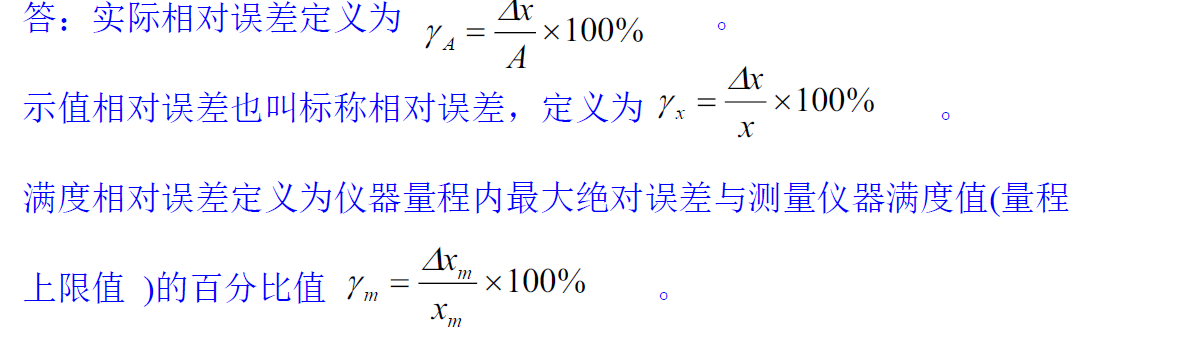
代表重点内容, 仅仅看一下 电子测量概念提纲 计算参考平时作业 第一章 1 什么是测量,什么是电子测量? 答:测量是人类对客观事物取得数量概念的认识过程,在这种认识过程中,人们借助于专门的设备,依据一定的理论,通过实验的方法,求出以所用的测量单位来表示的被测量的量值。 电子测量是测量领域的主要组成部分,它泛指以 电子技术为基本手段 的一种测量技术,是电子学与测量学相结合的产物。 2 电子测量的内容都包含哪些? 答:电子测量的内容是指对电子学领域内电参量的测量,主要有: (1) 电能量的测量: 指各种信号和波形的电压、电流、电功率等的测量; (2) 电信号特性的测量: 指信号的波形、频率、相位、噪声及逻辑状态等的测量; (3) 电路参数的测量: 指阻抗、品质因数、电子器件的参数等的测量; (4) 导出量的测量: 指增益、衰减、失真度、调制度等的测量; (5) 特性曲线的显示: 指幅频特性、相频特性及器件特性等的测量。 3 电子测量有哪些特点? 答: (1)测量频率范围宽。(2)测量量程广。(3)测量精度高。(4)测量速度快。(5)易于实现遥测。(6)易于实现测量过程自动化和测量仪器智能化。 4 电子测量的一般方法有哪些? 答:按测量手段分类—— 直接测量、间接测量、组合测量。 按测量方式分类—— 偏差式测量方法、零位式测量法、微差式测量法。 按被测量的性质分类—— 时域测量、频域测量、数据域测量、随机测量 5 测量仪器具有的主要功能是什么? 答:测量仪器的具有 变换、传输和显示的功能。 6 叙述直接测量、间接测量、组合测量的特点,并各举一两个测量实例。 答:1)直接测量:在测量过程中,能够直接将被测量与同类标准量进行比较,或者能够直接用已标定好的仪器对被测量进行测量,直接获得数值,这种测量方式称为直接测量。例如,用电压表测量电压、用欧姆表测量电阻阻值、用直流电桥测量电阻等都是直接测量。 直接测量的优点是过程简单迅速,是工程技术中广泛采用的测量方法。 2)间接测量:它是利用直接测量的量与被测量之间的函数关系(可以是公式、曲线或表格等),间接得到被测量量值的测量方法。例如,需要测量电阻上消耗的直流功率P,可以通过直接测量电压U、电流I,或直接测量电流I、电阻R,或直接测量电压U、电阻R,然后根据函数关系P=UI=I2R=U2/R,经过计算,“间接”获得功率P。 3)组合测量:当某项测量结果需用多个未知参数表达时,可通过改变测量条件进行多次测量,根据函数关系列出方程组并求解,进而得到未知量,这种测量方法称为组合测量。 7 解释偏差式、零位式和微差式测量法的含义,并列举测量实例。 答:1)偏差式测量法:在测量过程中,用仪器仪表指针的位移(偏差)表示被测量大小的测量方法称为偏差式测量方法。 2)零位式测量法:又称为零示法或平衡法,测量时将被测量与标准量相比较,用指零仪表指示被测量与标准量相等(平衡),从而获得被测量。 3)微差式测量法:偏差式测量法和零位式测量法相结合构成微差式测量。该法通过测量待测量与标准量之差(通常该差值很小)来得到待测量的值。 8 测量仪器的主要性能指标有哪些? 答: 精度;稳定性;输入阻抗;灵敏度;线性度;动态特性。 9 电子测量的灵敏度是如何定义的? 答:灵敏度表示测量仪表对被测量变化的敏感程度,一般定义为测量仪表指示值(指针的偏转角度、数码的变化、位移的大小等)增量∆y与被测量∆x之比。灵敏度的另一种表述方式叫作分辨力或分辨率,定义为测量仪表所能区分的被测量的最小变化量,在数字式仪表中经常使用。 第二章 1 什么是实际相对误差,示值相对误差,满度相对误差? 图片 2 什么是引用误差? 图片 3 测量误差的来源都有哪些? 答:仪器误差——是指仪器仪表本身及附件所引入的误差,这主要是由于涉及、制造、装配、检定等的不完善以及使用过程中元器件老化、机械部件磨损、疲劳等因素而使测量仪器带有的误差。 使用误差——是由于对测量设备操作使用不当带来的误差。 人身误差——由于测量者感官的分辨能力、视觉疲劳、固有习惯等而对测量实验中的现象与结果判断不准确而造成的。 影响误差——是指各种环境因素与要求条件不一致而带来的误差,如环境温度、湿度、电源电压、电磁干扰等与使用手册中规定的条件不一致。 方法误差——由于测量方法不合理造成的误差称为方法误差。 4 根据误差的性质,测量误差可以分为哪几类,各有什么特点? 答: *测量误差可分为系统误差、随机误差和粗大误差。 系统误差的主要特点:条件不变,误差不变;条件改变,误差遵循某种确定的规律而变化,具有可重复性。 随机误差的主要特点:有界性、对称性、补偿性、单峰性。 粗大误差的主要特点:测量值明显偏离真值。* 5 通过什么来反映测量结果的好坏? 答:通过精度反映测量结果的好坏。 6 判断系统误差有几种方法?减小系统误差有几种措施? 答:系统误差的判断方法有:理论分析法、校准和比对法、改变测量条件法、剩余误差法和公式判断法。① 零示法。在测量过程中, 只要判断检流计中有无电流, 而不需要用检流计读出读数, 因此只要检流计转动灵敏, 测量的准确度仅与标准量的准确度有关.广泛用于电桥测量中. ① 替代法(置换法)。由于替代前后整个测量系统及仪器示值均未改变,因此测量中的恒定系差对测量结果不产生影响,测量准确度主要取决于标准已知量的准确度及指示器灵敏度。 ② 补偿法(部分替代法)。此法常用于高频阻抗、电压、衰减量等测量。 ③ 对照法(交换法)。适于在对称的测量装置中用来检查其对称是否良好,或从两次测量结果的处理中,削弱或消除系统误差。 ④ 微差法。微差法比零示法更容易实现,在测量过程中已知量不必调节,仪器仪表直接读数,比较直观。 理论误差——测量方法建立在近似公式或不完整的理论基础上以及用近似值计算测量结果时所引起的误差称为理论误差。 7 何谓标准差、平均值标准差、标准差的估计值? 图片8 什么是等精度测量? 答:在保持测量条件不发生变化的条件下,对同一被测量进行多次重复测量的过程叫等精度测量。 8 什么是标称值? 答:测量器具上标定的数值称为标称值。 9 如何减少示值相对误差? 答:为了减少测量中的示值误差,在进行量程 选择时应尽可能使示值接近满意度值 ,一般以示值不小于满意度的三分之二为宜。 10 仪表的准确度与测量结果的准确度的关系。 答:测量中所用仪表的准确度并不是测量结果的准确度,只有在示值与满度值相同时,二者才相等(不考虑其他因素造成的误差,仅考虑仪器误差),否则测得值的准确度数值:降低于仪表的准确度等级。 11 什么是系统误差?系统误差的主要特点是什么? 答:在多次等精度测量同一量值时,误差的绝对值和符号保持不变,或当条件改变时误差按某种规律变化,这种误差称为系统误差,简称系差。 系统误差的主要特点是:只要测量条件不变,误差即为确切的数值,用多次测量取平均值的方法不能改变或消除系差,当条件改变时,误差也随之遵循某种确定的规律而变化,具有可重复性。 12 什么是随机误差?随机误差的主要特点是什么? 答: 随机误差又称偶然误差 ,是指对同一量值进行多次等精度测量时,其绝对值和符号均以不可预测的方式无规则变化的误差。 随机误差的主要特点是特点:有界性;对称性;抵偿性 。 13 利用修正值、修正公式可以削弱那种误差? 答: 零示法、替代法、补偿法、对照法、微差法、交叉读数法、 主要用来消弱或消除恒定系差。利用修正值或修正公式可以削弱系差。 13 判别测量数据中是否存在周期性系统误差应采用 阿贝一赫梅特判据 14 若测量次数较少时,理论上严密,实验证明效果也较好的粗大误差判据: 格拉布斯检验法 第三章 1 测量频率的方法都有哪些? 答:频率测量方法有很多,大体可以分为 模拟法和计数法 。模拟法又分为 频响法和比较法 。频响法是利用无源网络频率特性测量频率的,包括电桥法和谐振法。比较法是将被测频率信号和已知频率信号相比较,通过看、听等手段比较结果,从而获得被测信号的频率。包括拍频法、差频法和示波法。 计数法有电容充放电式 ,利用电子电路控制电容器充放电的次数或时间常数,再用磁电式仪表测量充放电电流的大小,来指示出被测信号的频率;还有一种是电子计数式,从频率的定义出发,用电子计数器显示单位时间内通过被测信号的周期个数来实现频率的测量。 2 采取什么测量方法? 答:电子计数器测量频率时,其测量的最高频率主要取决于计数器的工作速率。目前计数器测量频率的上限为lGHz左右,为了能测量高于1GHz的频率,有许多种扩大测量频率范围的方法。 测高频信号频率时,用计数法直接测出频率 ; 测低频信号频率时,用计数法先测其周期,再换算为频率 ,以期得到高精度的测量。 3 简述计数式频率计测量频率的原理,说明这种测频方法测频有哪些误差?什么叫量化误差?对一台位数有限的计数式频率计,是否可无限制地扩大闸门时间来减少+-1误差,提高测量精确度? 答: 电子计数法在一定时间间隔T秒时间内被测信号变化周期的重复次数,从而得到该信号的频率为 图片 4 电子计数法测量周期误差主要有哪几部分组成?什么叫触发误差?如何减小触发误差的影响? 答:测周误差除了量化误差和标准频率误差之外,还有触发误差,可表示为: 图片 5 +-1测量误差 图片 6 如何减小测量频率时的相对误差? 答:脉冲计数的相对误差与被测信号的频率成反比,与闸门时间成反比。也就是说, 被测信号频率越高,闸门时间越宽,此项相对误差越小。 7 电子计数法测量周期适合测量什么样周期的被测信号?低周期被测信号应采取什么测量方法? 答: 测高频信号频率时,用计数法直接测出频率;测低频信号频率时,用计数法先测其周期,再换算为频率 ,以期得到高精度的测量。若测信号的周期,可以采取与上相反的过程。 8 如何减小测量周期时的相对误差? 答:为了减小测量误差,可以 减小Tc(增大fc) ,但这受到实际计数器计数速度的限制。在条件许可的情况下,尽量使fc增大。另一种方法是把 Tx扩大m倍,形成的闸门时间宽度为m Tx ,以它控制主门开启,实施计数。 9 直读法测量频率分为哪几种测量方法? 答: 电桥法测频;谐振法测频;频率-电压转换法测频。 10 比较法测量频率分为哪几种测量方法? 答:拍频法测频;差频法测频;用示波器测量频率和时间间隔。 11 用示波器测量相位差分为几种测量方法? 答:直接比较法;椭圆法。 12 相位差的测量可以转换成对哪些参数的测量 答:可转换为时间间隔进行测量;电压进行测量。 13 测量高频信号的相位差应该采取什么方法? 答: 频率变换法把被测高频信号变换为低频或某一固定频率的信号进行测量。 14 当被测频率大于中界频率时,宜选用测频的方法;当被测频率小于中界频率时,宜选用测周的方法。 15 某计数式频率计,测频率时闸门时间为1s,测周期时倍乘最大为× 10 000,晶振最高频率为10MHz,求中界频率。 图片 第4章 1 按照显示方式的不同电子电压表可以分为几类? 答: 模拟式电子电压表和数字式电子电压表。 2 什么是波形因数、什么是波峰因数? 答:图片 3 测量交流电压的最基本的原理是什么? 答:利用 交流/直流转换电路将交流电压转换成直流电压,然后接到直流电压表上进行测量。 4 模拟交流电压表可以分为几种主要类型? 答: 检波-放大式;放大-检波式;调制式;外差式;热偶变换式。 5 低频交流电压表的检波电路主要采用什么检波器? 答: 均值检波器。先放大再检波 6 高频交流电压表的检波电路主要采用什么检波器? 答: 峰值检波器。先检波再放大 7 数字式电压表(DVM)按照根据电压的类型可分为几种类型? 答:直流DVM和交流DVM。 8 数字式电压表(DVM)按照A/D变换原理可分为几种类型? 答: 比较型,积分型,复合型。 9 简述电压测量的基本要求及电压测量仪器的分类方法。 答:电压的测量要求具有足够宽的电压测量范围和频率范围、足够高的输入阻抗和测量准确度、较强的抗干扰能力,以及能够测量多种信号波形。电压测量仪表的分类有很多,可以按频率范围分类,分为直流电压测量和交流电压测量两种;按被测信号的特点分类,有峰值表、有效值表及平均值表;按测量技术分类,分为模拟式和数字式电压测量。 10 表征交流电压的基本参数有哪些?简述个参量的意义。 答:交流电压可以用平均值、峰值、有效值、波形系数及波峰系数来表征。 11 交流电压表都是以何值来标定刻度读数的?真、假有效值的含义是什么? 答:交流电压表都是以正弦波有效值为刻度的, 真有效值:我们认为有效值表的读数就是被测电压的有效值,即有效值表是响应输入信号有效值的。因此,有效值表中α=Ui,并称这种表为真有效值表。 假有效值:有效值表的读数不能反映被测电压的有效值真实大小 12 不同波形KF与KP 图片 13 简述逐次比较法A/D转换原理及特点。 答:逐次逼近比较式A/D转换器的基本原理是将被测电压Ux和一可变的基准电压进行逐次比较,最终逼近被测电压,即采用的是一种“对分搜索”的策略,逐步缩小Ux未知范围的办法。 特点:转换速度较快,但由于直接与被测电压比较,也容易受到干扰。 14 简述双积分式A/D转换器的工作原理及特点。 答:双积分A/D转换器即双斜式A/D转换器,属于V-T变换式,其基本原理是在一个测量周期内,首先将被测电压Ux加到积分器的输入端,在固定时间内进行积分,也称定时积分;然后切断Ux,在积分器的输入端加与Ux极性相反的标准电压UN,由于UN一定,所以称定值积分,但积分方向相反,直到积分输出达到起始电平为止,从而将Ux转换成时间间隔进行测量,用电子计数器对此时间间隔进行计数,即为Ux之值。 特点:转换速度慢、抗干扰能力强。 15 指出串模干扰和共模干扰的含义和消除办法。 答:串模干扰。串模干扰是指干扰电压Usm以串联形式与被测电压Ux迭加后加到DVM输入端,串模干扰的基本抑制方法有输入滤波法和积分平均法。 被测信号的地线与电压表地线(机壳)之间存在电位差Ucm时,它们产生的电流对高低两根测试线都有干扰,这个干扰源Ucm称共模干扰。常采用浮地屏蔽技术,即仪器内部电路的地接机壳,两条测试线不设接地端,分别称为高(H)端和低(L)端。 16 脉宽调制式DVM实质是什么? 答:实质就是用被测电压Ux来调制基准电压Ur的正负波的宽度。 17 数字电压表特点 答: 准确度高、数字显示、输入阻抗高、测量速度快、自动化程度高、功能多样 18 数字电压表特点性能指标 答: 测量范围(量程、显示位数、超量程能力),分辨率,测量误差 第五章 1 信号源在电子测量中有何作用? 答:信号发生器是电子测量中最基本、使用最广泛的电子测量仪器之一,常被作为标准源对一般信号进行校准、比对,或以它为依据检验测试设备是否准确,在生产实践和科技领域中有着广泛的应用。信号发生器也称信号源,是用来产生振荡信号的一种仪器,可提供稳定、可信的参考信号,并且信号的特征参数完全可控。 2 信号源的常用分类方法有哪些?按照输出波形的不同,信号发生器可以分为哪几类? 答:( *1)按频率范围分类; (2)按输出波形分类; (3)按信号发生器的性能分类* 。 其中按照输出波形信号发生器可以分为正弦信号发生器和非正弦信号发生器。非正弦信号发生器又可包括脉冲信号发生器、函数信号发生器、扫频信号发生器、数字序列信号发生器、图形信号发生器、噪声信号发生器等。 3 按照输出频率的不同,信号源可以分为哪几类? 答:信号发生器按照频率发生的范围不同又可分为低频、视频、高频、甚高频、超高频信号发生器等 4 正弦信号源的主要技术指标有哪些?简述每个技术指标的含义。 答:正弦信号发生器的主要技术指标有: (1)频率范围:指信号发生器所产生信号的频率范围; (2)频率准确度:频率准确度是指信号发生器度盘(或数字显示)数值与实际输出信号频率间的偏差; (3)频率稳定度:频率稳定度是指其它外界条件恒定不变的情况下,在规定时间内,信号发生器输出频率相对于预调值变化的大小 (4)失真度与频谱纯度:通常用信号失真度来评价低频信号发生器输出信号波形接近正弦波的程度,对于高频信号发生器的失真度,常用频谱纯度来评价; (5)输出阻抗 (6)输出电平:输出电平指的是输出信号幅度的有效范围; (7)调制特性:是否能产生其他调制信号。 5 什么是信号发生器? 答: 测试用电信号的装置 ,统称为信号发生器,用在电子测量领域,也称为测试信号发生器。 6 低频信号发生器的主振器通常使用什么振荡器,应用最多的是什么振荡器? 答:在通信信号发生器中,主振器通常使用RC振荡器,而其中应用最多的当属文氏桥振荡器。 7 函数发生器的基本工作原理是什么? 答:先由积分电路和触发电路产生三角波和方波,然后通过函数转换器,将三角波整形成正弦波。 8 射频信号发生器分为哪几种类型? 答:调谐信号发生器;锁相信号发生器;合成信号发生器。 9 调谐式信号发生器的振荡器分为那三种类型? 答:变压器反馈式振荡器;电感反馈式振荡器;电容反馈式振荡器。 第六章 1 什么是电子示波器? 答:电子示波器简称示波器。它是一种用荧光屏显示电量随时间变化过程的电子测量仪器。 2 什么是示波器的偏转因数、偏转灵敏度? 答:偏转灵敏度(S):单位输入信号电压引起光点在荧光屏上偏转的距离H称为偏转灵敏度S: 图片 d为灵敏度的倒数,d称为偏转因数。 则如:d=2V/cm,荧光屏上uy波形高度H=2.6cm,则所观察波形幅度uy =2V/cm×2.6cm=5.2V。 3 偏转因数、偏转灵敏度的设定对波形幅度的影响。 答:根据显示的波形高度H,按上式可求得显示波形的电压幅度。 4 什么是扫描频率、扫描速度、时基因数? 答:扫描速度就是光点水平移动的速度,其单位是cm/s或div/s。扫描速度的倒数称为时基因数,它表示光点水平移动单位长度所需的时间。扫描频率表示水平扫描的锯齿波的频率。 5 扫描速度、时基因数的设定对展宽波形的影响。 答:扫描速度越高,表示示波器能够展开高频信号或窄脉冲信号波形的能力越强。为了观察缓慢变化的信号,则要求示波器具有较低的扫描速度,因此,示波器的扫描频率范围越宽越好。 6 为什么示波器的Y通道要接入衰减器,什么时候接入衰减器? 答:由于经常需要观察幅度较小的电压波形,因此示波器的灵敏度设计的较高,但当需要观察幅度较大的信号时,就必须接入衰减器对信号先进行衰减。 7 Y通道延迟线的作用是什么? 答:利用垂直通道输入的被测信号去触发水平偏转系统产生扫描电压波,,从接受触发到开始扫描需要一小段时间,这样就会出现被测信号到达Y偏转板而扫描信号尚未到达X偏转板的情况,为了正确显示波形,必须将接入Y通道的被测信号进行一定的延迟,以便与水平系统的扫描电压在时间上相匹配。 8 什么叫同步? 答:为了得到稳定的波形显示,必须是扫描锯齿波电压周期T与被测信号周期Ty保持整数倍关系,即T=nTy。由于扫描电压是由示波器本身的时基电路产生,它与被测信号电压是不相关的,为此一般采用被测信号(或与被测信号相关的信号)控制与触发时基电路,使T=nTy ,这个过程称为同步。 9 时基发生器的作用是什么? 答:时基发生器由闸门电路、扫描发生器和释抑电路组成。 时基闸门电路的作用是控制扫描电压发生器的工作,它是一个双稳态触发电路,当触发脉冲到来时,电路翻转,输出高电平,使扫描电压发生器开始工作。 扫描发生器扫的作用是产生高线性度的锯齿波电压。 释抑电路的作用是用来保证每次扫描都开始在同样的起始电平上。在水平偏转板上加一线性锯齿波扫描电压ux,该扫描电压将Y方向所加信号电压uy作用的电子束在屏幕上按时间沿水平方向展开。 10 示波器 主要技术指标 答: 带宽BW上升时间、扫描速度与时基因数、偏转灵敏度和偏转因数,输入阻抗,输入方式,触发源选择方式 11 示波器的触发源的触发信号有几种? 答:内触发;外触发;电源触发。 12 示波器的触发耦合方式有几种? 答:DC直流耦合;AC交流耦合;AC低频抑制;HF高频耦合。 13 示波器的触发方式有几种? 答:常态触发;自动触发;高频触发 。 14 通用示波器由哪些主要部分组成?各部分的作用是什么? 答: 通用示波器 主要由 垂直偏转通道,水平偏转通道和主机 三大部分组成。 (1)垂直偏转通道(Y轴系统)由衰减器、前置放大器、延迟级、输出放大器等组成。它的主要作用是对单端输入的被测信号进行处理变换,成为大小合适、极性相反的对称信号加至Y偏转板,以控制电子束的垂直偏转。 (2)水平偏转通道(X轴系统)由触发电路、扫描电路和X放大器组成。它的主要作用是同步触发电路在内或外触发信号作用下产生触发脉冲,在触发脉冲的作用下,输出大小合适的锯齿波电压,以驱动电子束水平偏转,并保证荧光屏上显示的波形稳定。 (3)主机部分主要包括Z轴电路、标准信号源、电源、示波管等部分。Z轴电路将X轴系统产生的增辉信号放大后加到示波管的栅极,从而实现在扫描正程时使波形加亮,扫描回程或扫描休止期时使回扫线和休止线消隐。标准信号源是一个标准方波发生器,用于提供幅度、周期等都很准确的方波信号,以便随时校准示波器的垂直灵敏度和扫描时间因数。电源是示波器工作时的能源,它将交流电变换成各种高、低电压电源,以满足示波管及各组成部分的工作需要。 15 通用示波器垂直(Y)通道包括哪些主要电路?它们的主要作用和主要工作特性是什么? 答:示波器垂直(Y)通道主要由输入电路、前置放大器、延迟线和输出放大器等组成。它的主要作用是检测被观察的信号,并把被测信号变换成为大小合适的双极性对称信号,无失真或失真很小的加到Y偏转板上,使显示的波形适于观测;并向X通道提供内触发信号源,去启动扫描;补偿X通道的时间延迟,以观测到诸如脉冲等信号的完整波形。 输入电路基本作用是引用被测信号,为前置放大器提供良好的工作条件。前置放大电路将信号适当放大,从中取出内触发信号,并具有灵敏度微调、校正,Y轴移位、极性反转等控制作用。延迟线的作用就是把加到垂直偏转板的被测信号也延迟一段时间,使信号出现的时间滞后于扫描开始时间,从而保证荧光屏上显示被测信号的全过程。输出放大器的功能是将延迟线传来的被测信号放大到足够的幅度,用以驱动示波管的垂直偏转系统,使电子束获得垂直方向的满偏转。 16 简述通用示波器扫描发生器环的各个组成部分及其作用。 答:扫描发生器环由扫描门、积分器及比较和释抑电路组成一个闭环控制系统。 扫描门产生快速上升或下降的闸门信号,它有三个作用:①输出时间确定的矩形开关信号,又称闸门信号,控制积分器扫描。②由于闸门信号和扫描正程同时开始,同时结束,可利用闸门信号作为增辉脉冲控制示波管,起扫描正程光迹加亮作用。③在双踪示波器中,利用闸门信号触发电子开关,使之工作于交替状态。积分器产生扫描锯齿波电压。释抑电路的作用是控制锯齿波电压的幅度,达到等幅扫描并保证扫描的稳定。 17 在通用示波器中,欲让示波器显示稳定的被测信号波形,对扫描电压有何要求? 答:为了示波器显示稳定的被测信号波形,扫描电压必须满足两个条件:①施加触发,确定扫描的起始点(在被测信号的同一相位点上)。②调节扫描周期,维持Tx=nTy(n为正整数)。 18 触发扫描和连续扫描有何区别? 答:观测连续信号时,扫描电压是连续的,即扫描正程紧跟着扫描回程,回程结束后,马上开始新的扫描正程,扫描是不间断的,这种扫描方式称为连续扫描。观测脉冲信号时,扫描脉冲只在被测脉冲到来时才扫描一次,没有被测脉冲时,扫描发生器处于等待工作状态,这种由被信号激发扫描发生器的间断的工作方式称为“触发扫描”方式。 19 什么是“交替”显示?什么是“断续”显示?对频率有何要求? 答:“交替”显示是指第一次扫描时接通Y1通道,第二次扫描时接通Y2通道,在屏幕上交替地显示Y1、Y2通道输入的信号。交替方式适合于观察高频信号。“断续”显示是在一个扫描周期内,高速地轮流接通两个输入信号,被测波形由许多线段断续地显示出来。断续方式适用于被测信号频率较低的情况。 20 示波器主要性能指标 答: 带宽、取样速率、存储深度、分辨率、扫描时间因数、触发能力 21 什么是非实时取样?取样示波器由哪些部分组成?各组成部分有何作用?说明取样示波器观察重复周期信号的过程。 答:从被测信号的许多相邻周期波形上取得样点的方法称为非实时取样,或称为等效取样。取样示波器主要也是由示波管、X通道和Y通道组成。 Y通道的作用是,在取样脉冲的作用下,把高频信号变为低频信号,取样脉冲来时取样门打开并取出样品信号,延长电路把每个取样信号幅度记录下来并展宽,接至模拟示波器Y偏转板,供最后信号合成用。 X通道主要任务是产生时基扫描信号,同时产生△t步进延迟脉冲送Y轴系统,控制取样脉冲发生器和延长门脉冲发生器的工作,即配合整个示波器的工作。 22 简述数字存储示波器的工作原理。 答:数字存储示波器首先将被测的模拟信号经过A/D转换后,得到数字信号存储于随机存储器RAM中。在显示时,再将数字信号读出,经D/A转换恢复为模拟信号,加在普通示波器的Y偏转板上。此时,X偏转板上不再加入锯齿波电压信号,而是与取样示波器类似地,加入由数码经过D/A产生的阶梯波。 21 什么是内同步?什么是外同步? 答:同步信号采自于Y通道的(即被观察信号)被称为内同步;同步信号采自于来自仪器外部的同步信号的方式被称为外同步。 22 示波器Y通道内为什么既接入衰减器又接入放大器?它们各起什么作用? 答:为适应Y通道输入的被测信号的大幅度的变化既接入衰减器又接入放大器。 放大器对微弱的信号通过放大器放大后加到示波器的垂直偏转板,使电子束有足够大的偏转能量。衰减器对输入的大幅度信号进行衰减。 23 什么是连续扫描和触发扫描?如何选择扫描方式? 答: 连续扫描:扫描电压是周期性的锯齿波电压。在扫描电压的作用下,示波管光点将在屏幕上作连续重复周期的扫描,若没有Y通道的信号电压,屏幕上只显示出一条时间基线。 触发扫描:扫描发生器平时处于等待工作状态,只有送入触发脉冲时才产生一次扫描电压,在屏幕上扫出一个展宽的脉冲波形,而不显示出时间基线。 被测信号是连续的周期性信号时,选择连续扫描方式。被测信号是短短暂的周期性脉冲信号时,选择触发扫描方式。 23 双踪与双线示波器的区别是什么 ? 答: 双踪示波器的垂直偏转通道由A和B两个通道组成。两个通道的输出信号在电子开关控制下,交替通过主通道加于示波管的同一对垂直偏转板。A、B两个通道是相同的。主通道由中间放大器、延迟线、末级放大器组成,它对两个通道是公用的。 双线示波器采用双线示波管构成。双线示波管在一个玻璃壳内装有两个完全独立的电子枪和偏转系统,每个电子枪发出的电子束经加速聚焦后,通过“自己”的偏转系统射于荧光屏上,相当于把两个示波管封装在一个玻璃壳内公用一个荧光屏,因而可以同时观察两个相互独立的信号波形。双线示波器内有两个相互无关的Y通道A和B,每个通道的组成与普通示波器相同。 24 取样示波器的非实时取样过程为什么能将高频信号变为低频信号?取样示波器能否观测单次性高频信号? 答:非实时取样过程对于输入信号进行跨周期采样,通过若干周期对波形的不同点的采样,经过保持延长后就将高频信号变成了低频信号。 取样示波器不能观测单次性高频信号,因为不能对其进行跨周期采样。 25 常用李萨育图形 图片 第九章 1 频谱仪性能指标 答: 频率范围、扫描宽度、频率分辨力、动态范围、灵敏度 2 动态频率特性与静态频率特性相比有何不同? ** 答:动态频率特性相比静态频率特性:1)顶部最大值下降,动态特性曲线峰值低于静态特性曲线,扫频速度越快,下降越多;2)动态特性曲线被展宽,当静态特性曲线对称时,随着扫频速度加快,动态特性曲线明显出现不对称,并向频率变化的方向一侧倾斜;3)扫速愈高,偏移愈严重,扫频速度越快,偏离越大。 3 简述频谱分析的各种方法的原理和特点。 答:①并联滤波法 中心频率固定的带通滤波器(BPF)按分辦率的要求依次增大,在这些滤波器的输出端分别接有检波器和相应的检测指示仪器。这种方案的优点就是能实时地选出各频谱分量,缺点是结构复杂、成本高。 ②可调滤波法 中心频率可调的滤波器。电路得到简化,然而可调滤波器的通带难以做得很窄,其可调范围也难以做得很宽,而且在调谐范围内难以保持恒定不变的滤波特性,因此只适用于窄带频谱分析。 ③扫频外差法 窄带滤波器的中心频率不变,被测信号与扫频的本振混频,将被测信号的频谱分量逐个移进窄带滤波器中,然后与扫频锯齿波信号同步地加在示波管上显示出来。 ④快速傅里叶(FFT)分析法是一种软件计算法。若知道被测信号 的取样值 ,则可用计算机按快速傅里叶变换的计算方法求出 的频谱。在速度上明显超过传统的模拟式扫描频谱仪,能够进行实时分析。但当前受A/D转换器等器件性能限制,工作频段还较低。 4 什么是实时频谱分析?扫频外差式频谱仪为什么只能进行非实时分析?FFT分析仪为什么能够进行实时分析? 答:所谓“实时”频谱仪,直观的理解是能够在被测信号频率变化之前完成测量、分析和显示,但它又不是指单纯意义上的测量时间短、速度快。一般认为,实时分析是指在长度为T的时段内,完成频率分辨率达到1/T的谱分析;或者待分析信号的带宽小于仪器能够同时分析的最大带宽。显然,实时的概念与信号带宽及频率分辨率有关。在要求的频段宽度范围内,如果数据采集、分析速度不小于数据变化速度,这样的分析就是实时的;如果待分析的信号带宽过宽以至超过了最大分析带宽,则分析变成非实时的。 扫频式频谱仪实质是一个中心频率在整个频率范围内可调谐的窄带滤波器。当改变它的谐振频率时,滤波器就分离出特定的频率分量,从而依次得到被分析信号的谱分量。因此,这种频谱仪所显示的频谱图是多次调谐之后拼接的结果,分析带宽受限于窄带滤波器的带宽(通常总是小于信号带宽),所以不能进行实时分析。 FFT分析仪是在对信号采样之后,选择一定时间长度的离散采样点进行付氏变换,从而得到频域信息。由于离散时域信号中已包含了该时段内所有的频率信息,因此可以认为FFT的分析带宽与信号带宽是匹配的,能够实现实时分析。 5 为何说扫频外差式频谱分析仪是属非实时频谱仪? 答:扫频式频谱仪实质是一个中心频率在整个频率范围内可调谐的窄带滤波器。当改变它的谐振频率时,滤波器就分离出特定的频率分量,从而依次得到被分析信号的谱分量。因此,这种频谱仪所显示的频谱图是多次调谐之后拼接的结果,分析带宽受限于窄带滤波器的带宽(通常总是小于信号带宽),所以不能进行实时分析。 6 如果已将外差式频谱仪调谐到某一输入信号频率上,且信号带宽小于调谐回路带宽,此时停止本振扫描,屏幕将显示什么? 答:由于本振并不扫描,即只能分析某一个特定的频率。而此时分析带宽(调谐回路带宽)大于信号带宽,所得结果是实时的,所以屏幕显示的将是该特定频率上的时域波形。 7 要想较完整地观测频率为20kHz的方波,频谱仪的扫描宽度至少应达到多少? 答:周期方波是由多个纯正弦信号复合而成的,理论上具有无限宽的频谱,每根谱线均位于奇次谐波处。但工程中通常只考虑主瓣中的谱线,即零频、基波(20KHz)、三次谐波(60KHz),所以频谱仪的扫描宽度至少应覆盖0~60KHz的范围。 8 kpz4l26e.png图片 kpz4lttx.png图片 部分图解 1低频信号发生器的原理框图。 图片 2差频式信号发生器的原理框图 图片 3示波器Y通道的原理框图。 kpz4uw8s.png图片 4示波器水平通道的原理框图。 kpz4vmal.png图片 5数字式电压表(DVM)的原理框图。 kpz4w6er.png图片 6数字式多用表(DMM)的原理框图。 kpz4wp8d.png图片
嵌入式&系统
刘航宇
5年前
1
1,625
4
2021-06-13
数字基带系统-USB
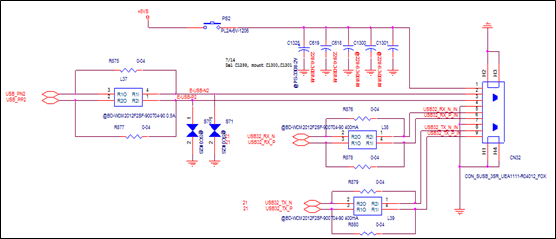
1 USB简介 USB,是英文Universal Serial Bus(通用串行总线)的缩写,而其中文简称为“通串线”,是一个外部总线标准,用于规范电脑与外部设备的连接和通讯。是应用在PC领域的接口技术。USB接口支持设备的即插即用和热插拔功能。USB是在1994年底由英特尔、康柏、IBM、Microsoft等多家公司联合提出的[1]。 2 USB的发展及现状 2.1 USB发展 USB版本 理论最大传输速率 速率称号 最大输出电流 推出时间 USB1.0 1.5Mbps(192KB/s) 低速(Low-Speed) 5V/500mA 1996年1月 USB1.1 12Mbps(1.5MB/s) 全速(Full-Speed) 5V/500mA 1998年9月 USB2.0 480Mbps(60MB/s) 高速(High-Speed) 5V/500mA 2000年4月 USB3.0 5Gbps(500MB/s) 超高速(Super-Speed) 5V/900mA 2008年11月 / 2013年12月 USB 3.1Gen 2 10Gbps(1280MB/s)[2] 超高速+(Super-speed+) 20V/5A 2013年12月 表1 USB发展情况 2.2 USB现状 USB 3.0是一种USB规范,该规范由英特尔等公司发起。 USB 3.0 也被认为是SuperSpeedUSB——为那些与PC或音频/高频设备相连接的各种设备提供了一个标准接口。只是个硬件设备[2],计算机内只有安装USB3.0相关的硬件设备后才可以使用USB3.0相关的功能!从键盘到高吞吐量磁盘驱动器,各种器件都能够采用这种低成本接口进行平稳运行的即插即用连接,用户基本不用花太多心思在上面。新的USB 3.0在保持与USB 2.0的兼容性的同时,还提供了下面的几项增强功能: 1)极大提高了带宽——高达5Gbps全双工(USB2.0则为480Mbps半 双工)。 2)实现了更好的电源管理。 3)能够使主机为器件提供更多的功率,从而实现USB——充电电池、LED照明和迷你风扇等应用。 4)能够使主机更快地识别器件。 5) 新的协议使得数据处理的效率更高。 USB 3.1是最新的USB规范,该规范由英特尔等大公司发起。与现有的USB技术相比,新USB技术使用一个更高效的数据编码系统,并提供一倍以上的有效数据吞吐率(USB IF协会)。它完全向下兼容现有的USB连接器与线缆。 USB 3.1作为下一代的USB传输规格,通常被称为“SuperSpeed+” ,将在未来替代USB 3.0。 1) USB 3.1(SuperSpeed+)将供电的最高允许标准提高到了20V/5A,供电100W。提供更快的充电。 2) USB 3.1支持高达10Gbps的传输速率,具有更快的传输速度。 3) USB 3.1新增USB A/V影音传输,支持手机显示输出。 USB 3.1是一个万能的通用接口,是手机、平板等小型设备所需要的,能够极大提升设备的连接性。而从目前来看,USB 3.1中的Type-C最有可能成为未来的连接标准,提供数据传输、外设连接、显示输出等一体化的连接方案。 3 USB分类 Type-A:标准的Type-A是电脑、电子配件中最广泛的介面标准,鼠标、U盘、数据线上大的一方都是此接口,体积也最大。 Type-B:一般用于打印机、显示器USB HUB等诸多外部USB设备 Type-C:它拥有比Type-A及Type-B均小得多的体积,其大小甚至能与Mini-USB及Micro-USB相媲美,是最新的USB接口外形标准。另外,Type-C是一种既可以应用在PC(主设备)又可以应用在外部设备(从设备)的接口类型,这是划时代的。 伴随USB2.0传输协议诞生也衍生了Mini-USB及Micro-USB接口。它们也都分别分为Type-A和Type-B[3]。到了USB3.0时代,由于传输速度的提升带来了针脚位的提升,因此仅有Type-A USB3.0接口保持与以往形状一样,Type-B和Micro-USB都改变了外形(体积增大)。 4 USB接口回路电路设计 笔记本一般使用的是Type-A和Type-C 类型母口。对于Type-A 类型接口,配备USB 3.0接口。回路如下图1所示 图片 Type-A接口在硬件回路上由一组USB2.0差分信号信号USB_PN2, USB_PP2以及两组USB 3.0差分信号USB32_RX_N, USB32_RX_P, USB32_TX_N, USB32_TX_P组成。在功能上该接口向下兼容USB2.0功能。一般USB的POWER接 5VS或5VA,USB差分线接BEAD或者共模电感一般为EMI需要。末端接TVS是安规要求。 对于Type-C接口回路如下: 图片 图2 Type-C接口回路 在NFSV15XX系列机种上,Type-C 3.0和Type-C 3.1共用同一接口。由于现有平台PCH没有USB3.1接口[4],故在使用USB3.1通信时需要外加一个转换芯片ASM1142。在NFSV15XX上Type-C3.1包含USB3.1输出传输的功能,但是不支持5V/20A供电输出。同Type-A接口一样,差分信号线接BEAD或者共模电感一般为EMI需要。末端接TVS是安规要求。 kpunhddv.png图片 图3 USB POWER设计 在电脑插入adapter或者battery时候,+3.3VA_PCH提供Enable信号 ,5VA(5VS)电源正常供电。在末端加保险丝,进行过流保护。 5 USB协议 5.1 概述 USB网络采用阶梯式星形拓扑结构,如图示。一个USB网络中只能有一个主机。主机内设置了一个根集线器,提供了主机上的初始附属点。主机定时对集线器的状态进行查询。当一个新设备接入集线器时,主机会检测到集线器状态改变,主机发出一个命令使该端口有效并对其进行设置。位于这个端口上的设备进行响应,主机收到关于设备的信息,主机的操作系统确定对这个设备使用那种驱动程序,接着设备被分配一个唯一标识的地址,范围从0~127,其中0为所有的设备在没有分配惟一地址时使用的默认地址。主机向它发出内部设置请求。当一个设备从总线上移走时,主机就从其可用资源列表中将这个设备删除。总的来说USB网络由主机和设备组成。 5.2 概括 kpunhyf8.png图片 5.3 USB主机 USB的所有数据通信(不论是上行通信还是下行通信)都由USB主机启动,所以USB主机在整个数据传输过程中占据着主导地位。在USB系统中只允许有一个主机。从开发人员的角度看,USB主机可分为三个不同的功能模块:客户软件、USB系统软件和USB总线接口。 1) 客户软件 客户软件负责和USB设备的功能单元进行通信,以实现其特定功能。一般由开发人员自行开发。客户软件不能直接访问USB设备,其与USB设备功能单元的通信必须经过USB系统软件和USB总线接口模块才能实现。客户软件一般包括USB设备驱动程序和界面应用程序两部分[5]。 2)USB系统软件 USB系统软件负责和USB逻辑设备进行配置通信,并管理客户软件启动的数据传输。USB逻辑设备是程序员与USB设备打交道的部分。USB系统软件一般包括USB总线驱动程序和USB主控制器驱动程序这两部分。这些软件通常由操作系统提供,开发人员不必掌握。 3)USB总线接口 USB总线接口包括主控制器和根集线器两部分。根集线器为USB系统提供连接起点,用于给USB系统提供一个或多个连接点(端口)。主控制器负责完成主机和USB设备之间数据的实际传输,包括对传输的数据进行串行编解码、差错控制等。该部分与USB系统软件的接口依赖于主控制器的硬件实现,开发人员不必掌握。 5.3 USB设备 一个USB设备由三个功能模块组成:USB总线接口、USB逻辑设备和功能单元。这里的USB总线接口指的是USB设备中的串行接口引擎(SIE);USB逻辑设备被USB系统软件看作是一个端点的集合;功能单元被客户软件看作是一个接口的集合。SIE、端点和接口都是USB设备的组成单元。为了更好地描述USB设备的特征,USB提出了设备架构的概念。从这个角度来看,可以认为USB设备是由一些配置、接口和端点组成的,即一个USB设备可以含有一个或多个配置,在每个配置中可含有一个或多个接口,在每个接口中可含有若干个端点。其中,配置和接口是对USB设备功能的抽象,实际的数据传输由端点来完成。在使用USB设备前,必须指明其采用的配置和接口。这个步骤一般是在设备接入主机时设备进行自举时完成的,我们在后面会进一步介绍。USB设备使用各种描述符来说明其设备架构,包括设备描述符、配置描述符、接口描述符、端点描述符以及字符串描述符,它们通常被保存在USB设备的固件程序中。 5.4 物理特性 USB通信格式: 图片 图5 在USB电缆上使用双向不归零编码和差动信号的传输 USB的数据包使用反向不归零编码(NRZI)。上图描述了在USB电缆段上传输信息的步骤。反向不归零编码由传送信息的USB代理程序完成;然后,被编码的数据通过差分驱动器送到USB电缆上;接着,接收器将输入的差分信号进行放大,将其送给解码器。使用该编码和差动信号传输方式可以更好地保证数据的完整性并减少噪声干扰。 图片 图6 反向不归零编码 使用反向不归零编码方式可以保证数据传输的完整性,而且不要求传输过程中有独立的时钟信号。反向不归零编码不是一个新的编码方式。它在许多方面都有应用。上图给出了一个数据流和编码之后的结果。在反向不归零编码时,遇到“0”转换,遇到“1”保持。反向不归零码必须保持与输入数据的同步性,以确保数据采样正确。反向不归零码数据流必须在一个数据窗口被采样,无论前一个位时间是否发生过转换。解码器在每个位时间采样数据以检查是否有转换。 kpunn3gg.png图片 图7 在USB电缆上使用双向不归零编码和差动信号的传输 若重复相同的“1”信号一直进入时,就会造成数据长时间无法转换,逐渐的积累,而导致接收器最终丢失同步信号的状况,使得读取的时序会发生严重的错误。因此,在NRZI编码之间,还需执行所谓的位填充的工作。位填充要求数据流中如果有连续的六个“1”就要强行转换。这样接收器在反向不归零码数据流中最多每七个位就检测到一次跳转。这样就保证了接收器与输入数据流保持同步。反向不归零码的发送器要把“0”(填充位)插到数据流中。接收器必须被设计成能够在连续的六个“1”之后识别一个自动跳转,并且立即扔掉这六个“1”之后的“0”位。 检测设备连接和速度:在USB设备连接时,USB系统能自动检测到这个连接,并识别出其采用的数据传输速率。USB采用在D+或D-线上增加上拉电阻的方法来识别低速和全速设备。USB支持三种类型的传输速率:1.5Mb/s的低速传输、12Mb/s的全速传输和480Mb/s的高速传输。如图后面图所示。当主控制器或集线器的下行端口上没有USB设备连接时,其D+和D-线上的下拉电阻使得这两条数据线的电压都是近地的(0V);当全速/低速设备连接以后,电流流过由集线器的下拉电阻和设备在D+/D-的上拉电阻构成的分压器。由于下拉电阻的阻值是15KΩ,上拉电阻的阻值是1.5KΩ,所以在D+/D-线上会出现大小为(Vcc*15/(15+1.5))的直流高电平电压。当USB主机探测到D+/D-线的电压已经接近高电平,而其它的线保持接地时,它就知道全速/低速设备已经连接了。 kpunne0a.png图片 图8 检测设备连接和速度 6 USB通信协议 6.1 包 包(Packet)是USB系统中信息传输的基本单元,所有数据都是经过打包后在总线上传输的。USB包由五部分组成,即同步字段(SYNC)、包标识符字段(PID)、数据字段、循环冗余校验字段(CRC)和包结尾字段(EOP)。 1.SYNC字段:由8位组成,作为每个数据封包的前导,用来产生同步作用,使USB设备与总线的包传输率同步,它的数值固定为00000001。 2.PID字段:用来表示数据封包的类型。包标识符中的校验字段是通过对类型字段的每个位求反码产生的。 图片 表2 PID字段包的类型 数据字段:是用来携带主机与设备之间要传递的信息,其内容和长度根据包标识符、传输类型的不同而各不相同。在USB包中,数据字段可以包含设备地址、端点号、帧序列号以及数据等内容。在总线传输中,总是首先传输字节的最低位,最后传输字节的最高位。 (1) 设备地址(ADDR)数据域 ADDR数据域由7位组成,可用来寻址多达127个外围设备。 (2) 端点(ENDP)数据域 ENDP数据域由4位组成。通过这4个位最多可寻址出32个端点。这个ENDP数据域仅用在IN、OUT与SETUP令牌信息包中。对于慢速设备可支持端点0以及端点1作为中断传输模式,而全速设备则可以拥有16个输入端点(IN)与16个输出端点(OUT)共32个端点。 (3) 帧序列号 当USB令牌包的PID为SOF时,其数据字段必须为11位的帧序列号。帧序列号由主机产生,且每个数据帧自动加一,最大数值为0x7FF。当帧序列号达到最大数时将自动从0开始循环。 (4) 数据 它仅存于DATA信息包内,根据不同的传输类型,拥有不同的字节大小,从0到1023字节(实时传输)。 4.循环冗余码CRC字段由不同数目的位所组成。根据不同的信息包类型,CRC数据域由不同数目的位所组成。其中重要的数据信息包采用CRC16的数据域(16个位),而其余的信息包类型则采用CRC5的数据域(5个位)。其中的循环冗余码校验CRC,是一种错误检测技术。由于数据在传输时,有时候会发生错误,因此CRC可根据数据算出一个校验值,然后依此判断数据的正确性 。 5.包结尾字段即发送方在包的结尾发出包结尾信号。USB主机根据EOP判断数据包的结束。 6.2 信息包格式 1.令牌(token)包:在USB系统中,只有主机才能发出令牌包。令牌包定义了数据传输的类型,它是事务处理的第一阶段。令牌包中较为重要的是SETUP、IN和OUT这三个令牌包。它们用来在根集线器和设备端点之间建立数据传输。一个IN包用来建立一个从设备到根集线器的数据传送,一个OUT包用来建立从根集线器到设备的数据传输[6]。 2.数据(data)包:数据封包含有4个域:SYNC、PID、DATA与CRC16。DATA数据域的位值是根据USB设备的传输速度及传输类型而定,且须以8字节为基本单位。也就是,若传输的数据不足8字节,或传输到最后所剩余的也不足8字节,仍须传输8字节的数据域。 3.握手(Handshake)包:握手信息包是最简单的信息包类型。在这个握手信息包中仅包含一个PID数据域而已。 6.3 事务 定义:在USB上数据信息的一次接收或发送的处理过程。类型:事务处理的类型包括输入(IN)事务处理、输出(OUT)事务处理。设置(SETUP)事务处理和帧开始、帧结尾等类型。 处理流程:在输出(OUT)事务处理和设置(SETUP)事务处理中,紧接着SETUP和OUT包后的是DATA包,DATA0和DATA1包是交替地发送的,在DATA包后面,设备将回应一个握手信号,如果设备可以接收数据,就回应ACK包,如果设备忙,就回应NAK包,如果设备出错,则回应STALL包;在IN事务中,IN包后面是设备发来的DATA包或NAK包或STALL包,若设备忙或出错,就发NAK包或STALL包给主机,若设备数据准备好发送,则发DATA包,DATA0和DATA1包也是交替地发送的,紧接着DATA包后面是主机发给设备的握手包,ACK表示主机可以接收数据,NAK包代表主机忙,STALL包代表主机出错。 6.4 USB传输类型 在USB的传输中,制定了4种传输类型:控制传输、中断传输、批量传输以及等时传输。控制传输类型分为2~3个阶段:设置阶段、数据阶段(无数据控制没有此阶段)以及状态阶段。根据数据阶段的数据传输的方向,控制传输又可分为3种类型:控制读取(读取USB描述符)、控制写入(配置USB设备)以及无数据控制。 1.控制传输:控制传输是USB传输中最重要的传输。它包含3种类型:控制读取、控制写入以及无数据控制。这3种控制传输类型又分为2~3个阶段:设置阶段、数据阶段(无数据控制没有此阶段)以及状态阶段。 2.实时传输:实时传输适用于必须以固定速率抵达或在指定时刻抵达,可以容忍偶尔错误的数据上。实时传输一般用于麦克风、喇叭等设备。实时传输只需令牌与数据两个信息包阶段,没有握手包,故数据传错时不会重传。 3.批量传输:用于传输大量数据,要求传输不能出错,但对时间没有要求,适用于打印机、存储设备等。 4.中断传输:中断传输方式总是用于对设备的查询,以确定是否有数据需要传输。因此中断传输的方向总是从USB设备到主机,常用于如键盘、游戏手柄等。 参考文献: [1]赵晓娜.一种基于STM32的USB接口数据通信方法研究[J].山西电子技术,2021(02):85-87. [2]苗旺,李彬华,王锦良,陈柄宇,高诗竹.基于USB2.0总线数据侦听的实时幸运成像系统~(*)[J/OL].天文研究与技术:1-12[2021-06-13].https://doi.org/10.14005/j.cnki.issn1672-7673.20210306.001. [3]陶小亮.基于USB总线的低成本舵偏角采集系统设计与应用[J].电子测量技术,2021,44(02):43-47. [4]赵一超.基于USB数字电离层斜测接收机设计[J].电脑知识与技术,2020,16(32):1-5. [5]曾妍. 汽车USB充电器参数检测台设计[D].长春工业大学,2020. [6]Realtek Semiconductor Corp.; Patent Issued for USB Interface System Capable Of Automatically Adjusting Connection Speed And Power Consumption Capabilities And Method (USPTO 10,684,668)[J]. Electronics Newsweekly, 2020, : 6967-.
通信&信息处理
刘航宇
5年前
0
766
2
2021-06-10
Linux sleep函数
函数名: sleep、usleep 功 能: 执行挂起一段时间 头文件: #include <unistd.h> 区 别: unsigned int sleep (unsigned int seconds);//n秒 int usleep (useconds_t usec);//n微秒 Linux下的sleep函数原型为: unsigned int Sleep(unsigned int seconds); 而MFC中的Sleep函数原型为: void Sleep(DWORD dwMilliseconds); 也就是说,Linux下(使用的gcc的库),sleep()函数是以秒为单位的,sleep(1);就是休眠1秒。而MFC下的Sleep()函数是以毫秒为单位的,sleep(1000);才是休眠1秒。而如果在Linux下也用微秒为单位休眠,可以使用线程休眠函数:void usleep(unsigned long usec)。 Linux下还有个delay()函数,原型为extern void delay(unsigned int msec);它可以延时msec*4毫秒,也就是如果想延时一秒钟的话,可以这么用 delay(250)。
嵌入式&系统
# 嵌入式
刘航宇
5年前
0
1,282
1
嵌入式与应用知识点学习&复习提纲
自己整理的复习提纲 目录 部分程序讲解 培养目标1提示联网和UI必须答,不答0分,少答扣分 培养目标2 培养目标3 培养目标4 培养目标5 培养目标6 培养目标7 LED会有变动,后面有时间出教程,希望能先理解下面程序这个是什么意思 培养目标8 部分程序讲解 培养目标1 1.嵌入式系统分三层:应用、内核、硬件层。ARM为硬件层、驱动内核层。 2.嵌入式系统与PC的区别 讲解:嵌入式系统一般指非 pc 系统,有计算机功能但又不称之为计算机的设备或器材。它是以应用为中心,软硬件可裁减的,适应应用系统对功能、可靠性、成本、体积、功耗等综合性严格要求的专用计算机系统。简单地说,嵌入式系统集系统的应用软件与硬件于一体,类似于 pc 中 bios 的工作方式,具有软件代码小、高度自动化、响应速度快等特点,特别适合于要求实时和多任务的体系。嵌入式系统主要由嵌入式处理器、相关支撑硬件、嵌入式操作系统及应用软件系统等组成,它是可独立工作的“器件”。 答案:下面3点缺一不可 隐藏内容,请前往内页查看详情 3.嵌入式系统的特点 1)联网:嵌入式设备支持网络连接,可实现物联。 2)UI:嵌入式设备更多的采用是自定义的简单UI。 提示联网和UI必须答,不答0分,少答扣分 3)包含专用调试电路 4)具有完整的系统测试和可靠性评估体系 培养目标2 4.gcc编译hello.c为hello 答: gcc hello.c -o hello或 gcc -o hello hello.c 5.Linux 删除文件夹命令和CD命令含义 rmdir 目录 或者“rm -rf /目录” cd命令:切换当前目录至其它目录。 知识点补充: 隐藏内容,请前往内页查看详情 6.【判断题】Vi有三种基本工作模式:写程序在文本输入模式。 (对) 知识点补充: 隐藏内容,请前往内页查看详情 培养目标3 7.int p[n]:数组;int *p[n]指针; 必考补充:数组指针和指针数组区分: 隐藏内容,请前往内页查看详情 培养目标4 8.文件IO中write返回正确值为:向内核文件fd中写的字节数 参考P84 培养目标5 9.程序分析题 (1)运行时间小于20秒有几个进程? (2)什么是僵尸进程?什么孤儿进程,20秒后会产生什么? #include "stdio.h" #include "stdlib.h" int main() { int i; int pid; pid = fork(); if(pid > 0) { while(1); } if(pid == 0) { for(i=0;i<20;i++) { printf("我爱刘航宇%d次了\n",i); sleep(1); } } return 0; }答: 隐藏内容,请前往内页查看详情 培养目标6 10.创建有名管道文件函数是: mkfifo pEQzCid.png图片 11.有名管道,管道文件名chat.txt,编写A.c与B.c单向聊天 (1)B发A收 (2)程序具备退出功能 答:本题不要求实现过程可以不写,只写程序,至于过程学习参考本站其它文章 管道程序: #include "stdio.h" int main() { int ret; ret = mkfifo("./chat.txt",0777); if(ret == -1) { printf("mkfifo error\n"); return -1; } return 0; }A端程序:(收方!!!) #include "stdio.h" #include "fcntl.h" #include "string.h" int main() { int fd; int i; char buf[32] = {0}; fd = open("./chat.txt",O_RDONLY,0777); if(fd == -1) { printf("open error\n"); return -1; } //start read while(1) { read(fd,buf,32); if(buf[0] == 'q') { break; } printf("buf = %s\n",buf); for(i = 0 ;i < 32; i++ ) { buf[i] = 0; } } close(fd); return 0; }B端程序(发方): 隐藏内容,请前往内页查看详情 培养目标7 12 socket函数,UDP通信,参数: int type赋值为 SOCK_DGRAM 13 SOC全称是 System on Chip称为芯片级系统或片上系统 14 判断:AHB总线下挂接都是高速模块,如LCD控制器、中断控制器等 (×) 15 判断ARM 公司不生产芯片 (√) 16 简答:CPU、SOC和嵌入式产品关系: 三个要点:1 CPU是一台计算机的运算核心和控制核心。(第一句必答,后面可以简写)CPU由运算器、控制器和寄存器及实现它们之间联系的数据、控制及状态的总线构成。主要功能是解释计算机指令以及处理计算机软件中的数据。计算机的可编程性主要是指对中央处理器的编程。2.SOC单片系统或片上系统是一个将电脑或其他电子系统集成到单一芯片的集成电路。(第一句必答,后面可以简写)单片系统可以处理数字信号、模拟信号、混合信号甚至更高频率的信号。单片系统常常应用在嵌入式系统中。单片系统的集成规模很大,一般达到几百万门到几千万门。SoC 可以基于 MCU 或 MPU,并将提供执行某些类型的应用程序所需的一切。隐藏内容,请前往内页查看详情 17.综合题:LED问题(本文推荐用电脑或平板观看,手机可能看不清) 预测题目:点亮GPF4的LED灯,实现其亮灭,将下面程序3个空区域补充完整。 (去年题目是点亮GPF4、5、6。看明白下面程序后可以同学自行尝试做一下,不过据说今年考点亮一个) 平台原理图: pEQzPJA.png图片 例图: 图片 控制与数据端口 pEQzFzt.png图片 程序:(可能与部分同学拍的略微不同,但是程序是一个意思,变量我图快方便写换了一部分,不影响,while循环改成for也是一个道理,这个东西很灵活 ::(勉强) ) //#include "global.h" #define GPFCON 0x56000050 #define GPFDAT 0x56000054 #define MPLLCON 0x4C000004 #define CLKDIVN 0x4C000014 void init_system_clock() { int *p; p = (int *)CLKDIVN; *p = 0x03; // FCLK:HCLK:PCLK=4:2:1, HDIVN=1,PDIVN=1 __asm__ { mrc p15, 0, r1, c1, c0, 0 orr r1, r1, #0xc0000000 mcr p15, 0, r1, c1, c0, 0 } p = (int *)MPLLCON; *p = (0x5c<<12)|(0x01<<4)|(0x02); } void mymain() { int *p; int i; init_system_clock(); //FCLK:HCLK:PCLK=200:100:50MHZ (1)------------ while(1) { (2)------------ for(i = 0 ;i < 10000; i ++); (3)------------ for(i = 0 ;i < 10000; i ++); } return ; }解答: 隐藏内容,请前往内页查看详情 培养目标8 18.rmmod功能:将驱动程序从liunx内核卸载;lsmod:查看内核中存在哪些模块 19.判断:驱动程序设备号分主设备号和次设备号 (√) 20.判断:驱动程序和应用程序一样有main函数 (×) 觉得本文对你有帮助,请点赞哦
嵌入式&系统
刘航宇
5年前
263
5,958
75
2021-06-02
matlab实现(7,3)线性分组码编码和BPSK调制
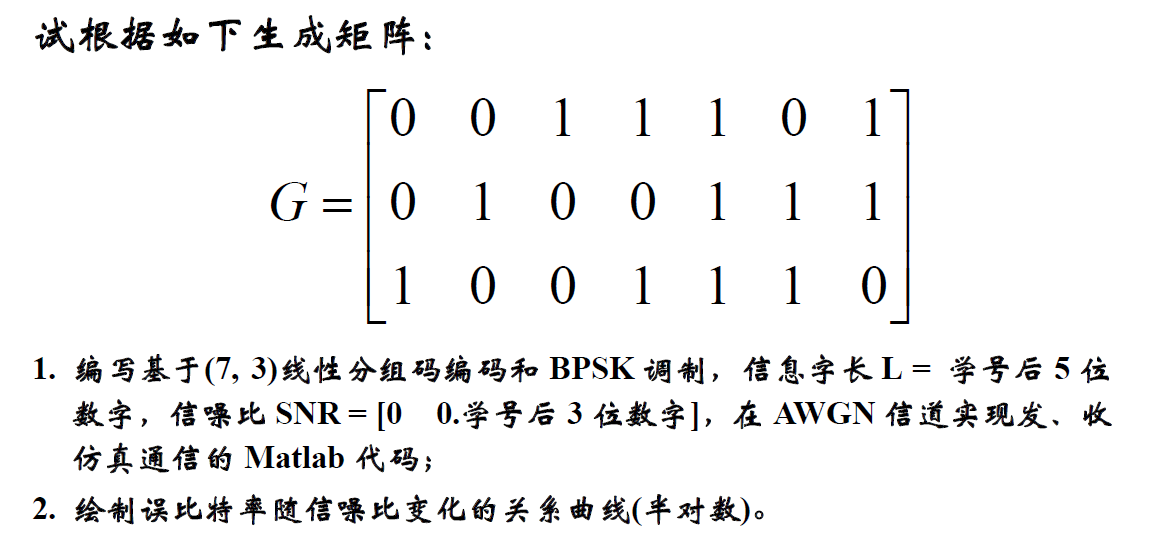
图片 1编写基于(7, 3)线性分组码编码和BPSK调制,信息字长L = 学号后5位数字,信噪比SNR = [0 0.学号后3位数字],在AWGN信道实现发、收仿真通信的Matlab代码; 2 绘制误比特率随信噪比变化的关系曲线(半对数)。 线性分组码和BPSK 程序完美版: 程序中的L与SNR需要修改为你的学号即可,不用建立脚本,直接复制命令窗口跑一下即可 提示:我们就是统计错误和误码率,不用管这个: . Single-error patterns loaded in decoding table. 8 rows remaining. 2-error patterns loaded. 1 rows remaining. 3-error patterns loaded. 0 rows remaining. clear all; close all; % specify parameters L = 64238;%学号,64238需要修改成你的后5位 SNR=[0:0.01:0.238]; %学号需要修改238为你学号后3位 G = [1 0 0 1 1 1 0;0 1 0 0 1 1 1;0 0 1 1 1 0 1];% code generator ebn0 = SNR; % db ebn0_1 = 10.^(ebn0*3.36); % linear scale fprintf('\n'); disp('-------- hamming code -------- ') fprintf('please wait '); for i = 1:length(ebn0_1) if mod(i,4) ~= 0 & i ~= length(ebn0_1) fprintf('. '); elseif mod(i,4) == 0 | i == length(ebn0_1) fprintf('. \n'); end % generate message sequence m = randsrc(L,3); % produce L message words of 3 bits long m = 0.5*(m+1); % convert to binary seq. % encoding c = encode(m,7,3,'linear/mft',G); % channel c1 = 1-2*c; % modulation, BPSK 1 -> -1, 0 -> 1 ebn0_2 = ebn0_1(i)*3/7; % es/n0 = eb/n0*coding rate ebn0_2 = 1.33*ebn0_2; %1.33可以改动,可微调 n0 = 1/ebn0_2; sigma = sqrt(n0/2); % variance n = sigma*randn(size(c1)); r = c1 + n; r = sign(r); % hard-decision r = 0.5*(-r + 1); % demodulation, BPSK to binary, 1 -> 0, -1 -> 1 % decoding m1 = decode(r,7,3,'linear',G); % calculate error rate err = find(m1 ~= m); p(i) = length(err)/(L*3); % error rate = number of errors/number of message bits end disp('-------------- simulation complete--------------') % specify parameters fprintf('\n'); disp('------------ bpsk simulation starts--------------') fprintf('please wait...'); for i = 1:length(ebn0_1) % transmit m = randsrc(L,1); % generate message sequence. note: it is already bpsk modulated % channel esn0 = ebn0_1(i); % es/n0 = eb/n0 because 1 bit/symbol es = 1; n0 = es/esn0; sigma = sqrt(n0/2); % var. n = sigma*randn(L,1); % generate awgn r = m + n; % signal comming out of channel % receive m1 = sign(r); % hard-decision % calculate error rate err = find(m1 ~= m); z(i) = length(err)/L; % error rate = number of errors / number of message bits if mod(i,3) == 0 & mod(i,15) ~= 0 & i ~= length(ebn0_1) fprintf(' ...'); elseif mod(i,15) == 0 | i == length(ebn0_1) fprintf(' ...\n'); end end disp('-------------- simulation complete--------------') p3 = 0.5*erfc(sqrt(ebn0_1)); semilogy(SNR,p,'+-',SNR,z,'--',SNR,p3,'k-'); %绘图 xlabel('信噪比(SNR)');ylabel('误码率BER');title('信噪比与误码率关系'); legend('Hamming BPSK Sim','BPSK Sim','BPSK Theory');实验现象: 图片 大作业与翻译word模板 不限速,高速下载: TIIE云盘-翻译word 下载地址:http://d0.ananas.chaoxing.com/download/61b4ebf1b6ae222d97832f7e13139fd9?at_=1622879357418&ak_=9bb313ad9b7bcbebdb76fbd797bdf4fd&ad_=fe8d1591b1f6bb18796226f291f0dd11&fn=%E4%BF%A1%E6%81%AF%E8%AE%BA%E7%BF%BB%E8%AF%91 提取码: TIIE云盘-大作业模板 下载地址:http://d0.ananas.chaoxing.com/download/e8c0456bc55692f108ac59c929ba7390?at_=1622879413856&ak_=366889da84ed6942814e677b2e374009&ad_=5c10e972165385fe02f71578d9fdc14b&fn=%E4%BF%A1%E6%81%AF%E8%AE%BA%E7%BB%BC%E5%90%88%E6%80%A7%E5%A4%A7%E4%BD%9C%E4%B8%9A 提取码:
通信&信息处理
刘航宇
5年前
8
1,337
7
2021-05-30
51单片机-汇编系列讲解-最强攻略
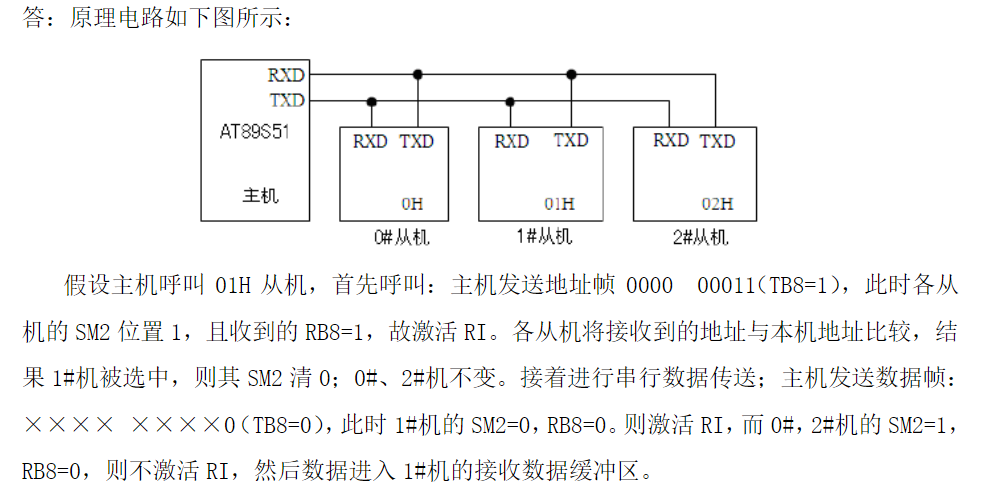
视频讲解 或者哔哩哔哩观看 https://www.bilibili.com/video/BV1fv411G7VU/ 例1 已知程序执行前有A=01H,SP=42H,(41H)=FFH,(42H)=FFH。下列程序执行后: POP DPH POP DPL MOV DPTR,#3000H RL A MOV B,A MOVC A,@A+DPTR PUSH ACC MOV A,B INC A MOVC A,@A+DPTR PUSH ACC RET ORG 3000H DB 10H,80H,30H,50H,30H,50H解答: POP DPH ; (42H)赋值给DPH,这个关系一直存在,知道程序结束。 SP= 41 H, POP DPL ;(41H)赋值给DPL,SP=40H MOV DPTR,#3000H ;DPTR=#3000H RL A ;A=02H ;16进制左移一位,先化为二进制过程更明显。 MOV B,A ;B=02H MOVC A,@A+DPTR ;查表得A=30H , 是从00H开始 查表的。 PUSH ACC ;将A 中的值赋值给,上一个空出位41H,(41H)=DPL 。 因为SP指针指向的栈 ,是有值的, 只有比他高的地址是空的。如指向(01H),那么(01H)中有值,(02H),(03H)….. 中没值。SP=41H,(41H)=#30H=DHL MOV A,B ;A=02H INC A ;A=03H MOVC A,@A+DPTR ;查表A=50H PUSH ACC ;将A 的值赋给再上一个空位,(42H)=50H=DPH 。 RET ;子程序结束!RET指令弹出断点位置即SP最近两字节数据SP=SP-2=40H,PC=5030(大端对齐) ORG 3000H DB 10H,80H,30H,50H,30H,50H例2 P1.7=ACC.0×(B.0+P2.1)+(P3.2)非 MOV C, B.0 ORL C, P2.1 ANL C, ACC.0 ORL C, /P3.2 MOV P1.7, C END例3 一台主机与三台从机通信 隐藏内容,请前往内页查看详情 例4 将片外数据存储器4004H、5005H、6006H单元的内容交换(16位交换) POP DPH POP DPL mov dptr,#4004h clr a movx a,@dptr push acc mov dptr,#5005h clr a movx a,@dptr mov b,a pop acc movx @dptr,a mov dptr,#4004h mov a,b movx @dptr,a mov dptr,#5005h clr a movx a,@dptr push acc mov dptr,#6006h clr a movx a,@dptr mov b,a pop acc movx @dptr,a mov dptr,#5005h mov a,b movx @dptr,a例5 51单片机DAC0832各种波形程序 程序: 隐藏内容,请前往内页查看详情 请勿标注电阻大小 图片 例6 如果考12MHZ单片机机器周期,切记不是1/12M,而是要先12分频,这个51单片机特点,频率是12M/12=1M,周期1/1M=1us
嵌入式&系统
刘航宇
5年前
47
3,633
14
2021-05-27
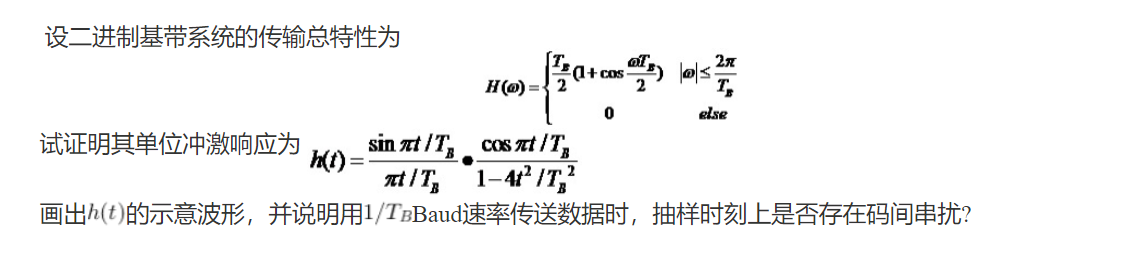
通信原理—第六章数字基带通信系统解答
通信原理—第六章数字基带通信系统解答 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 图片 提示:解答中纵坐标为H(w) 图片 图片 图片 图片 图片 图片 图片 1已知信息序列为1010000011000011,试确定相应的传号差分码、AMI码以及HDB3码。 提示可以不画波形,只要传号差分码、AMI码以及HDB3码,下图不用全画 图片 图片 图片 图片
通信&信息处理
刘航宇
5年前
1
596
9
2021-05-27
通信原理—樊昌信第七版思维导图
通信原理思维导图 本导图仅仅是最简提纲,请自行结合课本扩展知识点 请勿截图电子版,请务必认真手写! 思维导图图片 思维导图高清PDF下载 TIIE云盘—通信原理思维导图 下载地址:http://d0.ananas.chaoxing.com/download/d410f1b0c2967f6712f1fecc14ebb87d?at_=1622097687188&ak_=f1f6a18cdf3f13f1af57dd57fd6035c4&ad_=c62f9762eb479cb7ba2c9f707c66c854&fn=%E9%80%9A%E4%BF%A1%E5%8E%9F%E7%90%86%E6%80%9D%E7%BB%B4%E5%AF%BC%E5%9B%BE 提取码:
通信&信息处理
刘航宇
5年前
0
3,819
5
2021-05-26
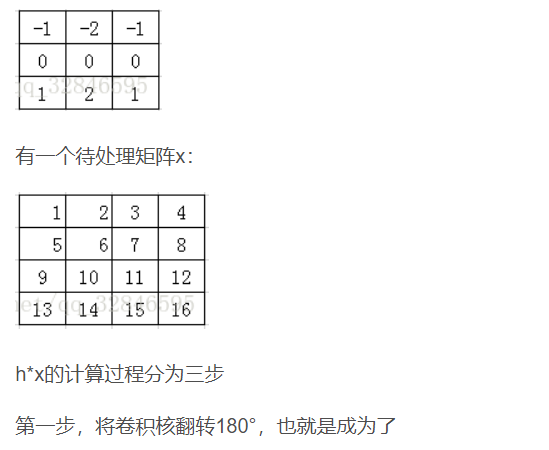
图像处理—矩阵卷积运算的具体过程
假设有一个卷积核h,就一般为3*3的矩阵: 图片 图片 图片
通信&信息处理
我的随笔
刘航宇
5年前
1
545
3
数字图像处理学习笔记
1.简述SUSAN角点检测算法的原理。对于如下图所示的大的尖角,设计一种估测其角度的方法 原理: SUSAN算法是一种直接利用灰度值进行角点检测的算法,它基于一个圆形模板,统计以每个像素为中心的模板邻域的灰度值与中心点灰度值相近点的个数。 估测办法: 1)先选取半径为R1圆形模板如下图1所示,将选取模板进行在图像的每个像素点上移动; 2)当模板核子位于图像中亮度一致的区域内时,SUSAN面积最大,其值为圆形模板的面积,随着模板核子离图像边缘越来越近,其面积越来越小。 3) 当模板中心靠近角点时,其面积值进一步减少,当模板中心落在角点上时,其面积达到局部最小值。 4) 根据C(r0,r)以及面积占比关系得出角度α1,然后分别选取R2、R3、R4模板重复以上过程,记录角度α2,α3,α4,α等于4个取平均 图片 2.简述利用一阶差分算子、二阶差分算子对图像边缘进行检测的依据;边缘检测中,为了减少噪声对边缘检测产生的影响,可采取那些措施? 检测依据: 边缘是图像上灰度变化最明显的地方,边缘检测利用此特点,对图像各像素点进行求微分或二阶微分来定位边缘像素点。由灰度变化特点,可将边缘类型分为阶梯状、脉冲状和屋顶状三种。对于阶梯状,图像边缘点对应一阶微分图像的峰值和二阶微分图像的零交叉处;对于脉冲状和屋顶状边缘,边缘点对应一阶导数的零交叉和二阶导数的峰值。如图2所示。其中边缘检测算子是利用图像边缘的突变性质来检测边缘的。主要分为两种类型,1)一阶导数为基础的边缘检测算子,通过计算图像的梯度值来检测图像边缘,如:差分边缘检测、Roberts 算子、Sobel 算子、Prewitt 算子;2)二阶导数为基础的边缘检测算子,通过寻求二阶导数中的过零点来检测边缘, 如:Laplacian 算子、LOG 算子、Canny 算子。 图片 使用该权值矩阵(高斯核)对图像做“卷积”(协相关,对应位置相乘最后求和得到一点的像素值),得到新的图像矩阵。 3.在采用直方图匹配的方法进行图像匹配时,出现如下图所示的结果(原图为彩色)。试分析: 图中哪些匹配结果是正确的,哪些是错误的? 试设计出避免错误匹配的改进方法。 图片 4.图像的数据量与哪些因素有关?试阐述采样与量化所遵循的一般原则 答: (1)图像分辨率;采样率;采样值。 (2)采样原则:采样是把空域上或时域上连续的图像(模拟图像)转换成离散采样点(像素)集合(数字图像)的操作,这些值可以是均匀间隔也可以是。采样越细,像素越小,越能精细地表现图像。 量化原则: 量化是把像素的灰度(浓淡)变换成离散的整数值的操作。量化越细致,灰度级数(浓淡层次)表现越丰富。 5.设计一组3×3模板,使其可以用于检测二值图像中的各种角点。 图片 6.在图像比例缩放变换中, 如果放大倍数太大, 按照最近邻域法处理会出现马赛克效应。 该问题有无办法解决或改善?如果有,请给出方案。 答: 有,方案:比例缩放所产生的图像中的像素可能在原图像中找不到相应的像素点,需要进行插值处理。 (1)最邻近法,以最邻近像素插入缺口即可 (2)双线性插值法更好,求出周围4个像素点距离比,根据该比率,由4个领域的像素灰度值进行双线性插值。 7.试阐述图像处理学三个层次的基本内容及相互关系。 图片 8.试讨论用于图像平滑处理的滤波器与用于图像锐化处理的滤波器之间的区别与联系。 答:1.相同点:都能减弱或消除傅里叶空间的某些分量,而不影响或较少影响其他分量,从而达到增强某些频率分量的效果。 2.不同点:频率滤波器减弱或消除了傅里叶空间的高频分量,所以达到了增强某些低频分量、平滑图像中细节的效果。锐化滤波器减弱或消除傅里叶空间的低频分量,所以达到了增强了高频分量、锐化图像中细节效果。 3.联系:两者效果相反,互为补充,从原始图像中减去平滑滤波器的结果得到锐化滤波器的效果,而从原始图像中减去锐化滤波器的结果则可以得到平滑滤波器的效果。 9.根据下列要求作图: (1) 画出用1个半径为2的圆形结构元素膨胀1个8×8的正方形的示意图; (2) 画出用1个半径为2的圆形结构元素腐蚀1个8×8的正方形的示意图。 结构元素的参考点为圆形结构的中心点。 图片 10 对于下图所示的边界,计算其8方向链码及差分链码。 图片 有任何问题或者批评建议可以评论留言或者QQ与我交流
通信&信息处理
刘航宇
5年前
8
1,195
14
2021-05-22
边界链码、归一化链码与一阶差分链码
链码(又称为freeman码)是用曲线起始点的坐标和边界点方向代码来描述曲线或边界的方法,常被用来在图像处理、计算机图形学、模式识别等领域中表示曲线和区域边界。它是一种边界的编码表示法,将图像中像素的绝对位置转换成了相对位置,用边界方向作为编码依据,为简化边界的描述,一般描述的是边界点集。 常用的链码按照中心像素点邻接方向个数的不同,分为4连通链码和8连通链码。4连通链码的邻接点有4个,分别在中心点的上、下、左和右。8连通链码比4连通链码增加了4个斜方向,因为任意一个像素周围均有8个邻接点,而8连通链码正好与像素点的实际情况相符,能够准确地描述中心像素点与其邻接点的信息。因此,8连通链码的使用相对较多。借用百度百科的一幅图: 图片 链码:11076765543322 归一化链码:把原链码看作由各方向数构成的自然数,将该码按一个方向循环,使其构成的自然数最小,此时形成归一化链码,也称规格化链码。归一化码=07676554332211 一阶差分链码:通过计算相邻两个元素方向变化(逆时针方向)的数字得到。就是前一个数字变化到后一个数字需要经过的步数,注意是逆时针方向,比如1->1经过0步,1->0经过7步,对照8链码图仔细琢磨一下就知道了。一阶差分链码=0777177077070 归一化的一阶差分链码:就是对一阶差分链码作归一化处理,即把差分链码链码看作由各方向数构成的自然数,将该码按一个方向循环,使其构成的自然数最小。归一化的一阶差分链码=0700777177077
通信&信息处理
刘航宇
5年前
1
1,390
3
2021-05-12
嵌入式第二次测试解答
具体操作流程参考上篇文章: 嵌入式实战—应用open调用内核open,应用close调用内核close通信程序 hello.c需要修改为: #include <linux/module.h> #include <linux/kernel.h> #include <linux/init.h> #include <linux/cdev.h> #include <linux/kdev_t.h> #include <linux/fs.h> //file_operations MODULE_LICENSE ("GPL"); int i = 10; struct file_operations ops; struct cdev mycdev; int major = 254; int minor = 5; dev_t dev; int j= 0; int k= 0; int open(struct inode *pinode,struct file *pfile) { j++; printk(KERN_INFO "liuhangyu myopen run j= %d\n",j); return 0; } int close(struct inode *pinode,struct file *pfile) { k++; printk(KERN_INFO "liuhangyu myclose run k= %d\n",k); return 0; } void myuart_init(void) { int ret; mycdev.owner=THIS_MODULE; dev = MKDEV(major,minor); ret = register_chrdev_region(dev,5,"myuart"); if(ret==-1) { printk(KERN_INFO "dev cant't use\n"); ret = alloc_chrdev_region(&dev,5,1,"myuart"); //automatic allocation dev if(ret==0) { printk(KERN_INFO "alloc : major= %d\n",MAJOR(dev)); } else { printk(KERN_INFO "alloc error\n"); return ; } } else { printk(KERN_INFO "dev can use\n"); } ops.owner=THIS_MODULE; ops.open=open; ops.release=close; cdev_init(&mycdev,&ops); cdev_add(&mycdev,dev,5); //mycdev send dev,equipment 1 return ; } static int __init hello_init (void) { i ++; myuart_init(); //init printk (KERN_INFO "driver init,i = %d\n",i); return 0; } static void __exit hello_exit (void) { i ++; printk (KERN_INFO "driver exit,i = %d\n",i); unregister_chrdev_region(dev,5); cdev_del(&mycdev); } module_init (hello_init); module_exit (hello_exit);app.c需要修改为 #include "stdio.h" #include "fcntl.h" #include "unistd.h" #include "stdlib.h" int main() { int fd; int q = 0; while(1) { fd = open("./myuart",O_RDWR,0777) ; if(fd==-1) { printf("open error\n"); return -1; } q ++; printf("liuhangyu open run q = %d\n",q); sleep (3); close(fd); q ++; printf("liuhangyu close run q = %d\n",q); sleep (3); } return 0; }直接在此输入下面这个命令,才能./app mknod ./myuart c 254 5
嵌入式&系统
# 嵌入式
刘航宇
5年前
3
386
5
上一页
1
...
6
7
8
...
10
下一页