首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
19,480 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
10,313 阅读
3
【高数】形心计算公式讲解大全
8,837 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,565 阅读
5
Vivado-FPGA Verilog烧写固化教程
7,088 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
21(共147篇)
找到
147
篇与
21
相关的结果
国家线已出,26复试与27届考研西北大学843电子信息该如何准备?
🔥 26届复试党(迫在眉睫版) 🌱 27届考研党(早鸟规划版) 27考研概况 843专业招生人数 考试科目 初试题型与分值 下面针对新生常见提问的一些问答: 国家线终于出了是264分!考西北大学843电子信息的宝子们看过来,这篇一次性说清26届复试和27届初试该怎么准备! 图片 peSlNL9.png图片 🔥 26届复试党(迫在眉睫版) 先联系导师,选导师!!提前占据自己喜欢的研究方向 ⏰ 时间节点要记牢 国家线公布后1-2周内,西大自划线+复试名单就会出 复试一般安排在3月底-4月初 📋 西北大学复试考什么?843电子信息复试通常包含: 专业课笔试 综合面试 实验操作 💡 现阶段必做3件事: 速查官网 → 按研究生网站或提供的资料看以往复试细则 联系导师 → 邮件模板准备好,附上简历+初试成绩 狂补专业课 → 重点看初试没考但复试常考的内容 💬 西大复试很公平,不歧视双非!本科没项目也别慌,把毕业设计吃透也能聊! 推荐的复试指导班和资料 ✅26 届 843 复试指导课仅需31(资料整理服务费68) 不到一顿饭钱轻松助你考研一臂之力,报名链接👉 https://mooc1.chaoxing.com/course/portal/f4Jg9QrC9ticE_Jwt1BcCA peSuvvj.png图片 peSlNL9.png图片 🌱 27届考研党(早鸟规划版) 📌 843电子信息考情速览 初试科目:政治、英语一、数学一、843电子基础综合 参考书:模电、数电和电路 🗓️ 全年时间轴(建议版) 图片 全科真题模拟;专业课刷西大历年真题(重点!) ⚠️ 西大843避坑提醒: 真题重复率不低!务必搞到近10年真题(报名27课程或者考研Q群519462257获取) 电路计算题要动手算,别只看不做 关注电子学院和计算机学院官网,9月看招生简章有无变动 推荐的初试系统全程班和资料(报名特惠488,该班级会送复试) ✅27 届 843 电子通信考研系统班:从基础划重点到真题逐题讲,还有复试全程指导,赠送 07-26 年 843/849 真题 + 笔记课件 + 复试资料包,报名链接👉https://mooc1.chaoxing.com/course/260044360.html peSlIW8.png图片 peSlNL9.png图片 请记住: 初试分数是硬道理,复试表现是加分项 别被"本科出身"焦虑绑架,西大真的很公平 现在准备完全来得及,执行力比完美计划更重要 27考研概况 西北大学在大厂如华为、中兴、腾讯和阿里的认可度一向不错,西北大学电子信息类专业在211中报名人数一直较少,21~25年,这几年来看,复试分数线一直都是国家线或者比国家线高几分,因此从报考性价比和上岸概率来说无疑是个不错的选择! 843专业招生人数 新一代电子信息专硕专硕专硕120人左右,电子科学与技术(学硕)20人左右,信息与通信工程(学硕)20人左右 考试科目 模电、数电、电路----(三门课不少章节不考,考的不算多) 初试题型与分值 初试:三门,每门2~3题,每科目占50分 考察基础理解程度 下面针对新生常见提问的一些问答: 问:西北大学843就业情况如何? 答:就业不错,高的有年薪50~60W的,也低的也有18W、15W的,每年有不少去大厂、银行的。 问:西北大学843三个专业初试是一样的吗? 答:完全一样,卷子也一样,复试略有不同 问:我本科不是电子信息类专业可以报名吗? 答:可以,不歧视,根据以往843考研班统计结果来看,是有不少跨专业上岸的,跨幅最大是本科土木 问:我本科是二本,专升本可以吗? 答:可以报名,考试流程都是正常的,对于这类学生可能存在自身学习能力低下,但是只要努力就会有结果,根据以往843考研班统计结果:每年都有二本上岸的,2024年有两位是专升本过来的 问:有没有843考研交流群? 答:有,推荐下面这个843群有500多人QQ群号:519462257QQ群号:519462257QQ群号:519462257 点击快速加入,西大843QQ交流大群 问:843初试都有考哪些东西? 答:模电,数电,电路分析三本书,不过不少地方不考,不用太担心!如果不知道重点可以进一步问学长 问:是否有推荐的靠谱843课程班或资料? 答:下面两个链接是推荐的843班 https://edu.ee.ac.cn/ https://mooc1.chaoxing.com/course/260044360.html peS1nSO.png图片 peSlNL9.png图片 如果只是需要考研初试复试真题资料话可以联系学长哦~ 问:843复试难吗,歧视双非吗? 答:不难中规中矩,不歧视双非,每年有二本上岸的,双非压线上岸的 问:843报考专业如何选择? 答:这个开放的,大家可能根据自己本科专业或者喜好进行选择,学硕毕业要求会难一些,其次招生人数也会少一些
我的随笔
# 西北大学843
刘航宇
1年前
0
2,405
2
2025-01-09
【FPGA】AXI DMA详解
<DMA简介 ZYNQ DMA简介 三、AXI DMA IP简介 四、AXI DMA参数与接口分析 define RX_INTR_ID XPAR_FABRIC_AXIDMA_0_S2MM_INTROUT_VEC_ID define TX_INTR_ID XPAR_FABRIC_AXIDMA_0_MM2S_INTROUT_VEC_IDXilinx FPGA里面的AXI DMA IP核的简单用法 DMA简介 DMA是一种内存访问技术,允许某些计算机内部的硬件子系统可以独立的直接读写内存,而不需要CPU介入处理,从而不需要CPU的大量中断负载,否则,CPU需要从来源把每一片段的数据复制到寄存器,然后在把他们再次写回到新的地方,在这个时间里,CPU就无法执行其他的任务。 DMA是一种快速数据传送方式,通常用来传送数据量较多的数据块。使用DMA时,CPU向DMA控制器发送一个存储器传输请求,这样当DMA控制器在传输的时候,CPU执行其他的操作,传输完成时DMA以中断的方式通知CPU。 DMA传输过程的示意图为: 图片 DMA的传输过程为: 1、为了配置用DMA传输数据到存储器,处理器(Cortex-A9)发出一条指令。 2、DMA控制器把数据从外设传输到存储器或者从存储器传输到存储器,从而较少CPU处理的事务量。 3、输出传输完成后,向CPU发出一个中断通知DMA传输可以关闭。 为了发起传输事务,DMA控制器必须得到以下信息: (1)、源地址——数据被读出的地址 (2)、目的地址——数据被写入的地址 (3)、传输长度——应传输的字节数 ZYNQ DMA简介 ZYNQ提供了两种DMA,一种是集成在PS中的硬核DMA,另一种是PL中使用的软核AXI DMA IP。 在ARM APU(Application Processor Unit,应用处理单元)设计过程中,已经考虑到大量数据搬移的情况,因此在APU中自带了一个DMA控制器DAMC,这个DMAC驻留在PS内,而且必须通过驻留在内存中的DMA指令编程,这些程序往往需要CPU准备,因此需要部分的CPU参与。DMAC支持多达8个通道,所以多个DMA结构的核可以挂载在单个DMAC上。 DMAC与PL的连接是通过AXI-GP接口,这个接口最高支持到32位宽,这也限制了这种模式下的传输速率,理论上最大为600MB/s,这种模式不占用PL资源,但需要对DMA指令编程,会增加软件的复杂性。 为了获取更高的速率,可以空间换时间,在PL中添加AXI DMA IP core,并利用AXI_HP接口完成高速的数据传输,各种接口的传输比较为: 图片 ZYNQ中ACI_HP接口的分布为: 图片 通过PL的DMA和AXI_HP接口传输方式的拓扑图为: 图片 DMA的数据传输经过S_AXI_HP接口,每一个HP接口都含有控制和数据fifo,这些fifo为大数据量突发传输提供缓冲,使得HP成为理想的高速数据接口。 对DMA的控制或配置通过M_AXI_GP接口(M代表master为PS),传输状态通过中断传达到PS的中断控制器。 对M_AXI_GP0理解是: 在ZYNQ7处理器系统IP core中,在PS-PL Configuration下的AXI Non Secure Enablement下有一个GP Master AXI Interface选项,可选一个M_AXI_GP0接口。 该接口的作用是对PL侧的IP core通过AXI-Lite总线进行配置,如果不仅需要的话直接不使能即可。 图片 图片 三、AXI DMA IP简介 ZYNQ提供了两种DMA,一种是集成在PS中的硬核DMA,另一种是PL中使用的软核AXI DMA IP。 AXI DMA IP核在AXI4-Stream IP接口之间提供高带宽直接存储访问。其可选的scatter gather(SG,链式相关)功能还可以从基于处理器的系统中的中央处理单元(CPU)卸载数据搬运任务。初始化、状态和管理寄存器通过AXI-Lite从接口访问(即数据发出方为PL,PS为Slave),核心功能组成为(这张图很有助于理解DMA中断以及SDK代码,下面会解释): 图片 原图位于AXI_DMA数据手册的第五页。 AXI DMA使用了三种总线,分别是: (1)、AXI Memory Map,用于内存交互,AXI4 Memory Map Read用于从DMA读取,AXI4 Memory Map用于向DMA写入。 (2)、AXI4-Lite同于对寄存器的配置。 (3)、AXI4-Stream接口用于对外设的读写,S2MM(Stream to Memory Mapped,数据流向内存映射)用于对外设读取。AXI_MM2S和AXI_S2MM是AXI_Stream总线,可以发送和接收连续的数据流,无需地址。 AXI DMA提供3种模式: (1)、Direct Register模式:用于在MM2S和S2MM通道上执行简单的DMA传输,小的FPGA资源少。有两个通道:一个从Device到DMA,另一个从DMA到Device。应用程序必须设置缓冲区地址和长度字段以启动相应通道中的传输。 (2)、Scatter/Gather模式:允许在单个DMA事务中将数据传输到多个存储区域传输数据。 (3)、Cyclic DMA模式: 四、AXI DMA参数与接口分析 图片 1、接口分析: (1)、M_AXI_MM2S:DMA的读通道,从DDR中读取数据。受Enable Read Channel控制,表现为M_AXI_MM2S。 (2)、M_AXI_S2MM:DMA的写通道,将数据写入DDR中。受Enable Write Channel控制,表现为M_AXI_S2MM。 (3)、M_AXIS_MM2S:DMA将数据发送到具有stream接口IP。 (4)、S_AXIS_S2MM:DMA将数据从具有Stream接口的IP中将数据读入。 (5)、mm2s_introut:DMA将数据从DDR的映射单元中读出,然后将数据发送到具有Stream接口的IP完成信号。 (6)、s2mm_introut:DMA将数据从具有stream接口的IP中读入,并写入到内存映射单元的完成中断信号。 2、参数分析 图片 (1)、Enable Scatter Gatter Engine 链式DMA操作,取消选中该选项可启用directregister模式操作。 (2)、Enable Micro DMA 改选项会生成高度优化的DMA,资源数量较少,用于传输极少量数据的应用程序。 (3)、Width of Buffer Length Register 根据IP手册pg021,在direct register模式下,此整数值用于指定控制字段缓冲区长度的有效位数,字节数等于2^(width),即字节读取和字节写入的有效长度都是2^(width)。比如宽度设置为26,可传输的字节数为2^(26)字节。(pg021,78页)。 (4)、Address Width 指定地址空间的宽度,默认32。 (5)、Enable Read Channel Memory Map Data Width:AXI MM2S存储映射读取总线的数据位宽,可为32、64、128、256、512、1024。 Stream Data Width:AXI MM2S AXI-Stream数据总线的位宽,该值必须小于等于Memory Map Data Width,可以为8、16、32、64、128、512、1024。 Max Burst Size:最大突发长度设置,指定的是MM2S的AXI4-Memory Map侧的突发周期的最大值,可为2、4、8、16、32、64、128、256。 (6)、Enable Write channel:同Read channel。 3、关于中断的理解 (1)、M_AXI_MM2S:DMA的读通道,从DDR中读取数据。受Enable Read Channel控制,表现为M_AXI_MM2S。 在AXI_DMA ip core的输出信号中,有两个中断信号,分别是s2mm_introut和mm2s_introut,mm指的是Memory Mapped,S指的是Stream。 Memory Map指的是什么?根据AXI DMA的介绍,AXI DMA提供一个介于AXI4 Memory Mapped 与AXI4 Stream IP之间的高带宽DMA: 原话位于IP参考的page5: The AXI DirectMemory Access (AXI DMA) IP core provides high-bandwidth direct memory accessbetween the AXI4 memory mapped and AXI4-Stream IP interfaces. 所以,对于DMA来说,S2MM,就是Stream形式的数据到达DDR映射空间,具体的实现方式是Stream数据流先进入DMA,之后再从DMA到Memeory Mapped。 MM2S是Memory Mapped将数据送入具有AXI Stream接口的IP。 从这里分析mm2s_introut与s2mm_introut信号的区别是分析不出来的,因为数据都是先到DMA,再从DMA发送出去。 在第5页还有一张图,讲述AXI DMA的架构: 图片 分析这张图,DDR内存映射空间的读写都是通过AXI4Memory Map完成的,也就是说s2mm与mm2s的重点不在PS DDR侧,重点在PL侧,当Stream接口的数据将输出传到DMA时候,这个过程叫做DMA的接收,DMA将映射单元的数据写到stream接口的IP,这个过程叫做DMA的发送。 所以!也就可以理解在SDK中将s2mm_introut定义为DMA接收中断,将mm2s_introut定义为发送中断了! 所以以下语句就很容易理解了: // DMA接收通道的中断ID define RX_INTR_ID XPAR_FABRIC_AXIDMA_0_S2MM_INTROUT_VEC_ID define TX_INTR_ID XPAR_FABRIC_AXIDMA_0_MM2S_INTROUT_VEC_ID Xilinx FPGA里面的AXI DMA IP核的简单用法 在FPGA里面,AXI DMA这个IP核的主要作用,就是在Verilog语言和C语言之间传输大批量的数据,使用的通信协议为AXI4-Stream。 Xilinx很多IP核都是基于AXI4-Stream协议的,例如浮点数Floating-point IP核,以及以太网Tri Mode Ethernet MAC IP核。要想将Verilog层面的数据搬运到C语言里面处理,就要使用DMA IP核。 本文以浮点数Floating-point IP核将定点数转换为浮点数为例,详细讲解AXI DMA IP核的使用方法。 浮点数IP核的输入输出数据都是32位,协议均为AXI4-Stream。C语言程序首先将要转换的定点数数据通过DMA发送给浮点数IP核,浮点数IP核转换完成后再通过DMA将单精度浮点数结果发回C语言程序,再通过printf打印出来。 定点数的数据类型为int,小数点定在第四位上,即:XXXXXXX.X。整数部分占28位,小数部分占4位。 转换后浮点数的数据类型为float,可以用printf的%f直接打印出来。 工程下载地址:https://pan.baidu.com/s/1SXppHMdhroFT8vGCIysYTQ(提取码:u7wf) MicroBlaze C语言工程的建法不再赘述,请参阅:https://blog.csdn.net/ZLK1214/article/details/111824576 以读写Floating-point IP核数据为例 图片 首先添加Floating-point IP核,作为DMA的外设端:(主存端为BRAM) 图片 图片 图片 图片 这里要注意一下,一定要勾选上TLAST,否则DMA接收端会出现DMA Internal Error的错误: 图片 下面是Xilinx DMA手册里面对DMA Internal Error错误的描述: 图片 添加AXI DMA IP核: 图片 IP核添加好了,但还没有连线: 图片 点击Run Connection Automation,自动连接DMA的S_AXI_LITE接口: 图片 图片 图片 图片 图片 自动连接浮点数IP核的时钟引脚: 图片 图片 图片 图片 图片 添加BRAM控制器: 图片 图片 最终的连线结果: 图片 修改新建的BRAM的容量为64KB: 图片 图片 最终的地址分配方式: 图片 保存Block Design,然后生成Bitstream: 图片 Bitstream生成后,导出xsa文件: 图片 Vitis Platform工程重新导入xsa文件: 图片 图片 修改C程序(helloworld.c)的代码: (这里面XPAR_BRAM_2_BASEADDR最好改成0xc0000000,因为生成的xparameters.h配置文件里面BRAM号可能有变化) /* * helloworld.c: simple test application * * This application configures UART 16550 to baud rate 9600. * PS7 UART (Zynq) is not initialized by this application, since * bootrom/bsp configures it to baud rate 115200 * * ------------------------------------------------ * | UART TYPE BAUD RATE | * ------------------------------------------------ * uartns550 9600 * uartlite Configurable only in HW design * ps7_uart 115200 (configured by bootrom/bsp) */ #include <stdio.h> #include <xaxidma.h> #include "platform.h" // DMA无法通过AXI Interconnect访问Microblaze本身的BRAM内存 // 只能访问挂接在AXI Interconnect上的内存 #define _countof(arr) (sizeof(arr) / sizeof(*(arr))) typedef struct { int numbers_in[40]; float numbers_out[40]; } BRAM2_Data; static BRAM2_Data *bram2_data = (BRAM2_Data *)XPAR_BRAM_2_BASEADDR; static XAxiDma xaxidma; int main(void) { int i, ret = 0; XAxiDma_Config *xaxidma_cfg; init_platform(); printf("Hello World\n"); printf("Successfully ran Hello World application\n"); // 初始化DMA xaxidma_cfg = XAxiDma_LookupConfig(XPAR_AXIDMA_0_DEVICE_ID); XAxiDma_CfgInitialize(&xaxidma, xaxidma_cfg); ret = XAxiDma_Selftest(&xaxidma); if (ret != XST_SUCCESS) { printf("XAxiDma_Selftest() failed! ret=%d\n", ret); goto err; } // 初始化DMA的输入数据 printf("numbers_in=%p, numbers_out=%p\n", bram2_data->numbers_in, bram2_data->numbers_out); for (i = 0; i < _countof(bram2_data->numbers_in); i++) { bram2_data->numbers_in[i] = 314 * (i + 1); if (i & 1) bram2_data->numbers_in[i] = -bram2_data->numbers_in[i]; } // DMA开始发送数据 (Length参数的单位为字节) ret = XAxiDma_SimpleTransfer(&xaxidma, (uintptr_t)bram2_data->numbers_in, sizeof(bram2_data->numbers_in), XAXIDMA_DMA_TO_DEVICE); if (ret != XST_SUCCESS) { printf("XAxiDma_SimpleTransfer(XAXIDMA_DMA_TO_DEVICE) failed! ret=%d\n", ret); goto err; } // DMA开始接收数据 ret = XAxiDma_SimpleTransfer(&xaxidma, (uintptr_t)bram2_data->numbers_out, sizeof(bram2_data->numbers_out), XAXIDMA_DEVICE_TO_DMA); if (ret != XST_SUCCESS) { printf("XAxiDma_SimpleTransfer(XAXIDMA_DEVICE_TO_DMA) failed! ret=%d\n", ret); goto err; } // 等待DMA发送完毕 i = 0; while (XAxiDma_Busy(&xaxidma, XAXIDMA_DMA_TO_DEVICE)) { i++; if (i == 200000) { // 必须确保DMA访问的内存是直接挂接在AXI Interconnect上的 // 否则这里会报DMA Decode Error的错误 (the address request points to an invalid address) printf("DMA Tx timeout! DMASR=0x%08lx\n", XAxiDma_ReadReg(xaxidma.RegBase + XAXIDMA_TX_OFFSET, XAXIDMA_SR_OFFSET)); goto err; } } printf("DMA Tx complete!\n"); // 等待DMA接收完毕 i = 0; while (XAxiDma_Busy(&xaxidma, XAXIDMA_DEVICE_TO_DMA)) { i++; if (i == 200000) { // floating-point IP核的配置里面一定要把A通道的tlast复选框勾选上, 使输入端和输出端都有tlast信号 // 否则s_axis_s2mm_tlast一直为0, DMA以为数据还没接收完, 就会报DMA Internal Error的错误 // (the incoming packet is bigger than what is specified in the DMA length register) printf("DMA Rx timeout! DMASR=0x%08lx\n", XAxiDma_ReadReg(xaxidma.RegBase + XAXIDMA_RX_OFFSET, XAXIDMA_SR_OFFSET)); goto err; } } printf("DMA Rx complete!\n"); err: for (i = 0; i < _countof(bram2_data->numbers_out); i++) printf("numbers_out[%d]=%f\n", i, bram2_data->numbers_out[i]); cleanup_platform(); return 0; }C程序的运行结果: 图片 图片 接下来讲一下我们刚才禁用掉的Scatter Gather接口的用法。取消禁用后,之前的C代码就不能运行了。 之前没有启用Scatter Gather的时候,我们一次只能提交一个DMA请求,等这个DMA请求的数据传输完毕后,我们才能提交下一个DMA传输请求。 有了Scatter Gather接口,我们就可以一次性提交很多很多DMA请求,然后CPU去干其他的事情。这可以大大提高传输效率。 除此以外,Scatter Gather还可以将多个位于不同内存地址的缓冲区合并成一个AXI4-Stream数据包传输。 下面的示例演示了如何利用Scatter Gather功能批量收发3组数据包。 启用了Scatter Gather后,DMA里面多出了一个M_AXI_SG接口,点击Run Connection Automation,连接到AXI Interconnect上: 图片 图片 Vivado工程Generate Bitstream,然后导出xsa文件。回到Vitis后,必须把Platform工程删了重建,不然XPAR_AXI_DMA_0_INCLUDE_SG的值得不到更新。 图片 图片 图片 原有的C程序不再可用,修改一下程序代码: /* * helloworld.c: simple test application * * This application configures UART 16550 to baud rate 9600. * PS7 UART (Zynq) is not initialized by this application, since * bootrom/bsp configures it to baud rate 115200 * * ------------------------------------------------ * | UART TYPE BAUD RATE | * ------------------------------------------------ * uartns550 9600 * uartlite Configurable only in HW design * ps7_uart 115200 (configured by bootrom/bsp) */ #include <stdio.h> #include <xaxidma.h> #include "platform.h" /* Xilinx的官方例程:C:\Xilinx\Vitis\2020.1\data\embeddedsw\XilinxProcessorIPLib\drivers\axidma_v9_11\examples\xaxidma_example_sg_poll.c */ // DMA无法通过AXI Interconnect访问Microblaze本身的BRAM内存 // 只能访问挂接在AXI Interconnect上的内存 #define _countof(arr) (sizeof(arr) / sizeof(*(arr))) typedef struct { int numbers_in[40]; float numbers_out[40]; } BRAM2_Data; typedef struct { uint8_t txbuf[640]; uint8_t rxbuf[640]; } BRAM2_BdRingBuffer; static BRAM2_Data *bram2_data = (BRAM2_Data *)0xc0000000; static BRAM2_BdRingBuffer *bram2_bdringbuf = (BRAM2_BdRingBuffer *)0xc0008000; static XAxiDma xaxidma; int main(void) { int i, n, ret = 0; XAxiDma_Bd *bd, *p; XAxiDma_BdRing *txring, *rxring; XAxiDma_Config *cfg; init_platform(); printf("Hello World\n"); printf("Successfully ran Hello World application\n"); // 初始化DMA cfg = XAxiDma_LookupConfig(XPAR_AXIDMA_0_DEVICE_ID); XAxiDma_CfgInitialize(&xaxidma, cfg); ret = XAxiDma_Selftest(&xaxidma); if (ret != XST_SUCCESS) { printf("XAxiDma_Selftest() failed! ret=%d\n", ret); goto err; } if (!XAxiDma_HasSg(&xaxidma)) { printf("XPAR_AXI_DMA_0_INCLUDE_SG=%d\n", XPAR_AXI_DMA_0_INCLUDE_SG); printf("Please recreate and build Vitis platform project!\n"); goto err; } // 初始化DMA的输入数据 printf("[0] numbers_in=%p, numbers_out=%p\n", bram2_data[0].numbers_in, bram2_data[0].numbers_out); printf("[1] numbers_in=%p, numbers_out=%p\n", bram2_data[1].numbers_in, bram2_data[1].numbers_out); printf("[2] numbers_in=%p, numbers_out=%p\n", bram2_data[2].numbers_in, bram2_data[2].numbers_out); for (i = 0; i < _countof(bram2_data[0].numbers_in); i++) { bram2_data[0].numbers_in[i] = 314 * (i + 1); bram2_data[1].numbers_in[i] = -141 * (i + 1); bram2_data[2].numbers_in[i] = -2718 * (i + 1); if (i & 1) { bram2_data[0].numbers_in[i] = -bram2_data[0].numbers_in[i]; bram2_data[1].numbers_in[i] = -bram2_data[1].numbers_in[i]; bram2_data[2].numbers_in[i] = -bram2_data[2].numbers_in[i]; } } // 配置DMA发送描述符 txring = XAxiDma_GetTxRing(&xaxidma); n = XAxiDma_BdRingCntCalc(XAXIDMA_BD_MINIMUM_ALIGNMENT, sizeof(bram2_bdringbuf->txbuf)); ret = XAxiDma_BdRingCreate(txring, (uintptr_t)bram2_bdringbuf->txbuf, (uintptr_t)bram2_bdringbuf->txbuf, XAXIDMA_BD_MINIMUM_ALIGNMENT, n); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingCreate(txring) failed! ret=%d\n", ret); goto err; } printf("BdRing Tx count: %d\n", n); ret = XAxiDma_BdRingAlloc(txring, 3, &bd); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingAlloc(txring) failed! ret=%d\n", ret); goto err; } p = bd; for (i = 0; i < 3; i++) { XAxiDma_BdSetBufAddr(p, (uintptr_t)bram2_data[i].numbers_in); XAxiDma_BdSetLength(p, sizeof(bram2_data[i].numbers_in), txring->MaxTransferLen); XAxiDma_BdSetCtrl(p, XAXIDMA_BD_CTRL_TXSOF_MASK | XAXIDMA_BD_CTRL_TXEOF_MASK); XAxiDma_BdSetId(p, i); p = (XAxiDma_Bd *)XAxiDma_BdRingNext(txring, p); } ret = XAxiDma_BdRingToHw(txring, 3, bd); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingToHw(txring) failed! ret=%d\n", ret); goto err; } // 配置DMA接收描述符 rxring = XAxiDma_GetRxRing(&xaxidma); n = XAxiDma_BdRingCntCalc(XAXIDMA_BD_MINIMUM_ALIGNMENT, sizeof(bram2_bdringbuf->rxbuf)); ret = XAxiDma_BdRingCreate(rxring, (uintptr_t)bram2_bdringbuf->rxbuf, (uintptr_t)bram2_bdringbuf->rxbuf, XAXIDMA_BD_MINIMUM_ALIGNMENT, n); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingCreate(rxring) failed! ret=%d\n", ret); goto err; } printf("BdRing Rx count: %d\n", n); ret = XAxiDma_BdRingAlloc(rxring, 3, &bd); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingAlloc(rxring) failed! ret=%d\n", ret); goto err; } p = bd; for (i = 0; i < 3; i++) { XAxiDma_BdSetBufAddr(p, (uintptr_t)bram2_data[i].numbers_out); XAxiDma_BdSetLength(p, sizeof(bram2_data[i].numbers_out), rxring->MaxTransferLen); XAxiDma_BdSetCtrl(p, 0); XAxiDma_BdSetId(p, i); p = (XAxiDma_Bd *)XAxiDma_BdRingNext(rxring, p); } ret = XAxiDma_BdRingToHw(rxring, 3, bd); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingToHw(rxring) failed! ret=%d\n", ret); goto err; } // 开始发送数据 ret = XAxiDma_BdRingStart(txring); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingStart(txring) failed! ret=%d\n", ret); goto err; } // 开始接收数据 ret = XAxiDma_BdRingStart(rxring); if (ret != XST_SUCCESS) { printf("XAxiDma_BdRingStart(rxring) failed! ret=%d\n", ret); goto err; } // 等待收发结束 n = 0; while (n < 6) { // 检查发送是否结束 ret = XAxiDma_BdRingFromHw(txring, XAXIDMA_ALL_BDS, &bd); if (ret != 0) { n += ret; p = bd; for (i = 0; i < ret; i++) { printf("DMA Tx%lu Complete!\n", XAxiDma_BdGetId(p)); p = (XAxiDma_Bd *)XAxiDma_BdRingNext(txring, p); } ret = XAxiDma_BdRingFree(txring, ret, bd); if (ret != XST_SUCCESS) printf("XAxiDma_BdRingFree(txring) failed! ret=%d\n", ret); } // 检查接收是否结束 ret = XAxiDma_BdRingFromHw(rxring, XAXIDMA_ALL_BDS, &bd); if (ret != 0) { n += ret; p = bd; for (i = 0; i < ret; i++) { printf("DMA Rx%lu Complete!\n", XAxiDma_BdGetId(p)); p = (XAxiDma_Bd *)XAxiDma_BdRingNext(rxring, p); } ret = XAxiDma_BdRingFree(rxring, ret, bd); if (ret != XST_SUCCESS) printf("XAxiDma_BdRingFree(rxring) failed! ret=%d\n", ret); } } err: for (i = 0; i < _countof(bram2_data[0].numbers_out); i++) printf("numbers_out[%d]=%f,%f,%f\n", i, bram2_data[0].numbers_out[i], bram2_data[1].numbers_out[i], bram2_data[2].numbers_out[i]); cleanup_platform(); return 0; }图片
FPGA&ASIC
# ASIC/FPGA
刘航宇
1年前
1
4,789
8
2024-08-23
FPGA/数字IC之FIFO深度计算
FIFO的深度计算问题1情况1:fa>fb,且在读和写中都没有空闲周期; 2情况2:fa>fb,两个连续的读写之间有一个时钟周期延迟; 3️情况3:fa>fb,在读和写中都有空闲周期; 4️情况4:fa>fb,读写使能的占空比给定; 5️情况5:fa<fb,在读和写中都没有空闲周期; 6情况6:fa<fb,在读和写中都有空闲周期 7情况7:fa=fb,在读和写中都没有空闲周期。 8️情况8:fa=fb,在写和读中都有空闲周期 情况9:数据速率如下所示; 1️0情况10:以不同的形式给出写入和读取的规则。 对于读写同时进行的FIFO,有一个简便计算公式 FIFO的深度计算问题 FIFO的最小深度问题,可以理解为两个模块之间的数据传输问题;只有在读取速度慢于写入速度的情况下,我们才需要一个FIFO,来暂时的寄存这些没有被读出去的数据; 一个最主要的逻辑思想是: 确定FIFO的大小,就是要找到在写入过程中没有被读取的数据的个数;即FIFO的深度等于未被读取的数据的数量。 现在考虑一种实例,A时钟域数据发往B时钟域,将会出现以下几种情况: 1情况1:fa>fb,且在读和写中都没有空闲周期; 例如: 写入频率fa = 80MHz,读取频率fb = 50MHz。 突发长度即要写入的数据数目为120个。 计算如下: 写入一个数据需要的时间 = 1 / 80MHz = 12.5ns; 写入突发事件中所有数据需要时间 = 120 * 12.5 = 1500ns; 读取一个数所需时间 = 1 / 50MHz = 20ns; 所有数据写入完成后使用1500ns,1500ns可以读出数据为 = 1500 / 20 = 75个。 所以,要在FIFO中存储的剩余数据量为 120 - 75 = 45; 故:设计的FIFO的最小深度为45! 2情况2:fa>fb,两个连续的读写之间有一个时钟周期延迟; 这种情况和情况1一样,仅仅是人为的制造了某种混乱; 3️情况3:fa>fb,在读和写中都有空闲周期; 例如: 写入频率fa = 80MHz,读取频率fb = 50MHz。 突发长度即要写入的数据数目为120个。 两个连续的写之间空闲周期为1,两个连续的读之间空闲周期为3; 计算如下: 可以理解为每两个时钟周期写入一次数据,每四个时钟周期读出一个数据。 写入一个数据需要的时间 = 2 (1 / 80MHz) = 2 12.5 = 25ns; 写入突发事件中所有数据需要时间 = 120 * 25 = 3000ns; 读取一个数所需时间 = 4 (1 / 50MHz) = 4 20 = 80ns; 所有数据写入完成后使用3000ns,可以读出数据为 = 3000 / 80 = 37.5 ≈ 37个。 所以,要在FIFO中存储的剩余数据量为120 - 37 = 83; 故:设计的FIFO的最小深度为83! 4️情况4:fa>fb,读写使能的占空比给定; 例如: 写入频率fa = 80MHz,读取频率fb = 50MHz。 突发长度即要写入的数据数目为120个。 写使能占空比为50%,读使能占空比为25%。 这种情况和情况3一样,没有什么区别; 【注】这里的情况2️和情况4仅仅是为了说明同一个问题可以通过不同的方式来提问。 5️情况5:fa<fb,在读和写中都没有空闲周期; 例如: 写入频率fa = 30MHz,读取频率fb = 50MHz。 突发长度即要写入的数据数目为120个。 计算如下: 在这种情况下,深度为1的FIFO就足够了,因为不会有任何数据的丢失,因为读比写快。 6情况6:fa<fb,在读和写中都有空闲周期 例如: 写入频率fa = 30MHz,读取频率fb = 50MHz。 突发长度即要写入的数据数目为120个。 两个连续的写之间空闲周期为1,两个连续的读之间空闲周期为3; 计算如下: 可以理解为每两个时钟周期写入一次数据,每四个时钟周期读出一个数据。 写入一个数据需要的时间 = 2 (1 / 30MHz) = 2 33.33 = 66.667ns; 写入突发事件中所有数据需要时间 = 120 * 66.667 = 8000ns; 读取一个数所需时间 = 4 (1 / 50MHz) = 4 20 = 80ns; 所有数据写入完成后使用8000ns,可以读出数据为 8000 / 80 = 100个。 所以,要在FIFO中存储的剩余数据量为120 - 100 = 20; 故:设计的FIFO的最小深度为20 7情况7:fa=fb,在读和写中都没有空闲周期。 例如: 写入/读取频率fa = fb = 30MHz。 突发长度即要写入的数据数目为120个。 计算如下: 如果clka和clkb之间没有相位差,则不需要FIFO; 如果clka和clkb之间有一定的相位差,一个深度为“1”的FIFO就够了。 8️情况8:fa=fb,在写和读中都有空闲周期 例如: 写入频率fa = 50MHz,读取频率fb = 50MHz。 突发长度即要写入的数据数目为120个。 两个连续的写之间空闲周期为1,两个连续的读之间空闲周期为3; 计算如下: 可以理解为每两个时钟周期写入一次数据,每四个时钟周期读出一个数据。 写入一个数据需要的时间 = 2 (1 / 50MHz) = 2 20 = 40ns; 写入突发事件中所有数据需要时间 = 120 * 40 = 4800ns; 读取一个数所需时间 = 4 (1 / 50MHz) = 4 20 = 80ns; 所有数据写入完成后使用4800ns,可以读出的数据为4800 / 80 = 60个。 所以,要在FIFO中存储的剩余数据量为120 - 60 = 60; 故:设计的FIFO的最小深度为60! 情况9:数据速率如下所示; 例如: 写入80个数据,需要100个时钟周期,(写入的时钟随机); 读出8个数据,需要10个时钟周期,(读取的时钟随机)。 计算如下: ①上述表明,书写频率等于读出频率 ②读和写都可以在任何随机的时刻发生,以下是一些可能性。 图片 在上述情况中,完成写入所需的周期如下: 图片 在FIFO设计中,为了更稳妥的考虑,我们选择最坏的情况下进行数据传输,以此来设计FIFO的深度,以避免数据丢失; 最坏的情况即:写和读之间的数据率差异应该最大,因此对于写操作,考虑最大的数据速率,对于读操作,考虑最小的数据速率。 故:考虑上述可能性中的第四种情况(即所谓的“背靠背”情况): 计算如下: 160个时钟周期内,写入160个数据; 数据的读取率为8个数据/10个时钟周期; 在160个时钟周期内可以读取的数据量为:160 * 8 / 10 = 128。 因此,需要存储在FIFO中的剩余字节数为160 - 128 = 32。 故:设计的FIFO的最小深度为32! 1️0情况10:以不同的形式给出写入和读取的规则。 例如: fa = fb / 4; Tenb = Ta * 100; enb的占空比为25%。计算如下: 在这种情况下,就需要假设一些数值: 设:fb = 100MHz。则,fa = 1 / 4 * 100 = 25MHz。 则:Ta = 40ns,Tenb = 4000ns; 又因为写使能占空比25%。 则:写使能时间为4000ns / 4 = 1000ns。【注】此处认为fb为写时钟,因为只有这样,才能是写入的比读出的快,当然了,把fa当做写时钟,下面就没法算了,哈哈。 突发长度 = 1000ns / 10ns = 100个; 在写入的1000ns内,可以读出 1000ns / 40ns = 25个; 所以,要在FIFO中存储的剩余数据量为100 - 25 = 75; 故:设计的FIFO的最小深度为75!例如 假设两个异步时钟clk_a和clk_b,clk_a = 148.5M,clk_b = 140M。如图所示,clk_a时钟域中连续1920个16bit的数据通过data_valid标记,有效数据之后,紧接着720个无效数据时钟周期。请问,该数据通过异步fifo同步到clk_b时钟域,异步fifo的最小深度是多少?请写出计算过程。 图片 【解析】 考虑情况9️中case-4案例,即所谓的“背靠背”情况: 在a时钟域通过1920 * 2 = 3840个Ta传输3840个数据; Ta = 1 / 148.5MHz ≈ 6.734ns; Tb = 1 / 140MHz ≈ 7.143ns。 3840 * 6.734 = 25858.56ns; 在25858.56ns内,通过clk_b读取的个数为:25858.56 / 7.143 ≈ 3620个。 那么,剩余未读完的个数为3840 - 3620 = 220; 即FIFO的深度最小为220。【注】在此情况下,理解清楚规则非常之重要! 对于读写同时进行的FIFO,有一个简便计算公式 FIFO_Depth >= Burst_length -Burst_length (rd_clk/ wr_clk)(rd_rate) 最后,需要注意的是,我们在本文通篇计算的都是最小FIFO深度,但是在实际应用中,尤其是异步FIFO的应用中,需要使用格雷码计数,这就要求FIFO的深度为2的整数次幂,否则格雷码计数到最大值跳变为0时,将出现多位变化的情况,不符合设计。异步FIFO深度不是2的整数次幂情况下,则可能需要特殊处理,需要使用别的编码方式了。
FPGA&ASIC
# ASIC/FPGA
刘航宇
2年前
1
1,042
2
通讯等不确定性条件下设计无人机之间的安全距离
引用文章: 简介 1. 研究问题 2. 分离原理介绍 3. 安全半径设计 4. 仿真及实验验证 引用文章: Q. Quan, R. Fu and K. -Y. Cai, "How Far Two UAVs Should Be subject to Communication Uncertainties," in IEEE Transactions on Intelligent Transportation Systems, doi: 10.1109/TITS.2022.3213555. 简介 近年来,无人机技术的快速发展使得低空空域中无人机的数量爆炸增长。碰撞避免作为无人机应用的关键技术,近年来人们已经进行了大量研究,设计出各种方法使得无人机在飞行过程中与障碍物保持一定安全距离(本文将该距离称为无人机的 安全半径)。然而, 在碰撞避免相关研究中,不确定性往往是难以处理的问题。针对不确定性,主流的方法包括对不确定性进行预测,以及在闭环控制中给予补偿。然而,以上方法很依赖于预测及补偿的精准设计,设计不当将有可能导致控制器失效。本研究受地面交通中车辆间安全距离启发,基于对通信不确定性和无人机控制器性能的假设,提出了 安全半径设计和控制器设计的原则 (本文称为 分离原理 )。进一步,安全半径具体通常通过经验预先设计,如果设计得过大或过小将分别影响无人机飞行的高效性及安全性。 如何根据无人机模型及通信不确定性确定其安全半径下界仍然是悬而未决的问题 。利用分离原理,本文研究了 设计阶段(无不确定性)和飞行阶段(受不确定性影响)的无人机安全半径设计 。最后,通过仿真和实验表明了所提方法的有效性。 图片 1. 研究问题 本研究中,无人机与障碍物的运动模型均建模为多旋翼模型,换句话说,我们考虑的障碍物可以等效为另一架多旋翼飞行器。对于多旋翼飞行器而言,其可以获得自身以及障碍物的实时位置和速度。为简单描述起见,本文建模均为二维,类似的建模及分析方法可以扩展到三维情况。 我们首先建立多旋翼的具体控制模型如下。 其中多旋翼的位置和速度分别表示为 ,速度控制模型建立为一阶惯性环节,其时间常数 与无人机的机动性能相关,控制输入 为期望速度。在此基础上,本文定义一种新的滤波位置模型如下。 多旋翼滤波位置的物理意义是根据多旋翼的当前位置、速度及机动能力,对其运动趋势预测。在此基础上,定义多旋翼的安全区域为以滤波位置为圆心的圆形区域,其半径称为安全半径 。对于障碍物,我们类似定义其滤波位置,以及以障碍物滤波位置为圆心的圆形障碍物区域,半径称为障碍物半径 。 图片 进一步,我们针对不确定性做了以下2点假设:(1)无人机和障碍物对自身的三维位置及三维速度估计均存在噪声;(2)无人机在获取障碍物状态信息时,存在通信延迟及丢包。该通信网络模型如下图所示。 图片 本研究中,丢包模型进一步建模为均值模型,且假设估计噪声、通信延迟、丢包均值模型误差均存在上界且上界已知。其数学定义如下: 图片 进一步,本文对无人机的控制器性能做出如下假设:(1)在无不确定性的理想状态下,无人机的控制器可以使无人机和障碍物之间的 真实距离 始终大于给定安全距离;(2)在存在以上不确定性的实际情况中,无人机的控制器可以使无人机和障碍物之间的 估计距离 始终保持给定安全距离。本研究的具体目标是在不确定性上界已知的条件下计算出无人机安全半径的下界。 图片 2. 分离原理介绍 无人机在理想状态下设计的控制器中给定的安全半径值 ,在实际含有不确定性的环境中将转化为估计安全半径 ;直观上理解,将含有不确定性的无人机与障碍物之间的估计位置误差代替真实位置误差作为反馈时,控制器将难以维持给定的安全半径。本研究中, 分离原理具体研究的是不确定性在满足什么条件时无人机的控制器设计和安全半径设计过程可分离 ,也就是估计安全半径和安全半径相等, 成立。分离原理具体数学描述如下: 图片 分离原理中提出的三个条件包括一个充分必要条件(i)以及两个充分条件(ii)和(iii)。其中,条件(i)为理论推导,在实际中难以得到验证,通常可通过条件(ii)和(iii)进行验证。条件(ii)对无人机速度的限制较宽,该式在障碍物主动躲避无人机的条件下容易达成。反之,条件(iii)对无人机速度的限制较苛刻,要求无人机速度严格大于障碍物速度,适用于在障碍物不主动躲避无人机的情况下。以上两种情况的区别如下图所示。 图片 3. 安全半径设计 根据上述分离原理的提出,在分离原理满足的前提下,基于无人机的安全半径模型和通信网络模型,可以进一步设计 合适大小的无人机安全半径 。如前文所述,安全半径设计过大会增加环境的冗余度,设计过小则无法保证飞行过程的安全。在本研究中,给出了在理想情况下以及实际情况下安全半径的下界,分别如下: 图片 4. 仿真及实验验证 仿真及实验验证在仿真中,我们针对单障碍物、多非合作障碍物、多合作障碍物设计了三种场景来验证我们方法的有效性。在实验中,我们使用DJI tello无人机对以上情况进行测试,结果与我们的理论一致。实验视频: https://youtu.be/LkSDPFGa_1E 论文地址 https://rfly.buaa.edu.cn/pdfs/2022/How_far_two_UAVs_should_be_subject_to_communication_uncertainties.pdf
软硬件算法
# 软件算法
刘航宇
2年前
0
971
1
泛化能力,过拟合,欠拟合,不收敛,奥卡姆剃刀
泛化能力 欠拟合过拟合与不收敛 解决手段一、模型训练拟合的分类和表现 二、欠拟合 三、过拟合 总结: 泛化能力 泛化能力(generalization ability)是指机器学习算法对新鲜样本的适应能力,简而言之是在原有的数据集上添加新的数据集,通过训练输出一个合理的结果。学习的目的是学到隐含在数据背后的规律,对具有同一规律的学习集以外的数据,经过训练的网络也能给出合适的输出,该能力称为泛化能力。 欠拟合过拟合与不收敛 用比较直白的话来讲,就是通过数据训练学习的模型,拿到真实场景去试,这个模型到底行不行,如果达到了一定的要求和标准,它就是行,说明泛化能力好,如果表现很差,说明泛化能力就差。为了更好的理解泛化能力,这里引入三种现象,欠拟合、过拟合以及不收敛。 欠拟合(under-fitting),是指模型拟合程度不高,数据距离拟合曲线较远,或指模型没有很好地捕捉到数据特征,不能够很好地拟合数据。即,在训练数据集上表现差,在测试集数据也表现差。 过拟合(over-fitting),是指模型在训练集上表现很好,在测试集上效果差。 不收敛(non-convergence),指误差函数一直在振荡,不能趋近一个定值,没有找到局部或者全局最小值。 举个例子来说明下,好比高考数学考试,为了在高考能有个好成绩,高一到高三,好多人会采用“题海战术”来训练自己的做题能力,但高考试卷上的题,都是新题,几乎没有一模一样的题,学生们为了掌握解题规律就不停的刷题,希望最后自己碰到类似的题,能够举一反三,能学以致用,这种规律掌握的适用性,就是泛化能力。 有的人对相似题型的解题规律掌握的很好,并且解题效果也很好,这种就是泛化能力强,这种同学往往数学成绩就好。 有的同学成绩不好,就是泛化能力差,可能有三种情况 1.做了不少题,但没有找到解题规律,不管碰到老题和新题都不会做,这种就是欠拟合。 2.做了很多题,自认为做过的每一类题型的解题规律都掌握了,而且在之前“题海战术”的题目中,确实表现的很好,但是一碰到新的题目,完全就不会,或者做错,这种学生就是那种喜欢死记硬背的,这种就是过拟合。 3.平常也不做题,然后每次一做题就瞎蒙,导致偶尔对,偶尔错,这种就是不收敛。 为了更直观展示,引用了几张图来说明,如下图所示,真实曲线是正弦曲线,蓝色的点是训练数据,红色的线为拟合曲线。 图片 图片 解决手段 在深度学习的模型建立过程中,一般都是用已经产生的数据训练,然后使用训练得到的模型去拟合未来的数据,借此来预测一些东西。在机器学习和深度学习的训练过程中,经常会出现欠拟合和过拟合的现象。训练一开始,模型通常会欠拟合,所以会对模型进行优化,等训练到一定程度后,就需要解决过拟合的问题了。 一、模型训练拟合的分类和表现 如何判断过拟合呢?我们在训练的时候会定义训练误差,验证集误差,测试集误差(即泛化误差)。训练误差总是减少的,而泛化误差一开始会减少,到了一定程度后不减少反而开始增加,这时候便出现了过拟合的现象。 如下图,直观理解,欠拟合就是还没有学习到数据的特征,还有待继续学习,所以此时判断的不准确;而过拟合则是学习的太彻底,以至于把数据的一些不需要的局部特征或者噪声所带来的特征都给学习到了,所以在测试的时候泛化误差也不佳。 图片 从方差和偏差的角度来说,欠拟合就是在训练集上高方差,高偏差,过拟合就是高方差,低偏差。为了更加直观,我们看下面的图 图片 对比上图,图一的拟合并没有把大体的规律给拟合出来,拟合效果不好,这个就是欠拟合,还需要继续学习规律,此时模型简单;图三的拟合过于复杂,拟合的过于细致,以至于拟合了一些没有必要的东西,这样在训练集上效果很好,但放到测试集和验证集就会不好。图二是最好的,把数据的规律拟合出来了,也没有更复杂,更换数据集后也不会效果很差。 在上面的拟合函数中,可以想到,图三过拟合的拟合函数肯定是一个高次函数,其参数个数肯定比图二多,可以说图三的拟合函数比图二要大,模型更加复杂。这也是过拟合的一个判断经验,模型是否过于复杂。另外针对图三,我们把一些高次变量对应的参数值变小,也就相当于把模型变简单了。从这个角度上讲,可以减少参数值,也就是一般模型过拟合,参数值整体比较大。从模型复杂性上讲,可以是: ——模型的参数个数; ——模型的参数值的大小。 个数越多,参数值越大,模型越复杂。 二、欠拟合 欠拟合的表现 有什么方法来判断模型是否欠拟合呢?其实一般都是依靠模型在训练集和验证集上的表现,有一个大概的判断就行了。如果要有一个具体的方法,可以参考机器学中,学习曲线来判断模型是否过拟合,如下图: 图片 欠拟合的解决方案 (1)增加数据特征:欠拟合是由于学习不足导致的,可以考虑添加特征,从数据中挖掘更多的特征,有时候嗨需要对特征进行变换,使用组合特征和高次特征; (2)使用更高级的模型:模型简单也会导致欠拟合,即模型参数过少,结构过于简单,例如线性模型只能拟合一次函数的数据。尝试使用更高级的模型有助于解决欠拟合,增加神经网络的层数,增加参数个数,或者使用更高级的方法; (3)减少正则化参数:正则化参数是用来防止过拟合的,出现欠拟合的情况就要考虑减少正则化参数。 三、过拟合 过拟合的定义 模型在训练集上表现好,但在测试集和验证集上表现很差,这就是过拟合 图片 过拟合的原因 (1)数据量太小 这是很容易产生过拟合的原因。设想我们有一组数据很好的满足了三次函数的规律,但我们只取了一小部分数据进行训练,那么得到的模型很可能是一个线性函数,把这个线性函数用于测试集上,可想而知肯定效果很差。(此时训练集上效果好,测试集效果差) (2)训练集和验证集分布不一致 这也是很大一个原因。训练集上训练出来的模型适合训练集,当把模型应用到一个不一样分布的数据集上,效果肯定大打折扣,这个是显而易见的。 (3)网络模型过于复杂 选择模型算法时,选择了一个复杂度很高的模型,然而数据的规律是很简单的,复杂的模型反而不适用了。 (4)数据质量很差 数据有很多噪声,模型在学习的时候,肯定也会把噪声规律学习到,从而减少了一般性的规律。这个时候模型预测效果也不好。 (5)过度训练 这是同第四个相联系的,只要模型训练时间足够长,那么模型肯定会把一些噪声隐含的规律学习到,这时候降低模型的性能也是显而易见的。 解决方法 (1)降低模型复杂度 处理过拟合的第一步就是降低模型复杂度。为了降低复杂度,我们可以简单地移除层或者减少神经元的数量使得网络规模变小。与此同时,计算神经网络中不同层的输入和输出维度也十分重要。虽然移除层的数量或神经网络的规模并无通用的规定,但如果你的神经网络发生了过拟合,就尝试缩小它的规模。 (2)数据集扩增 在数据挖掘领域流行着这样的一句话,“有时候往往拥有更多的数据胜过一个好的模型”。因为我们在使用训练数据训练模型,通过这个模型对将来的数据进行拟合,而在这之间又一个假设便是,训练数据与将来的数据是独立同分布的。即使用当前的训练数据来对将来的数据进行估计与模拟,而更多的数据往往估计与模拟地更准确。因此,更多的数据有时候更优秀。但是往往条件有限,如人力物力财力的不足,而不能收集到更多的数据,如在进行分类的任务中,需要对数据进行打标,并且很多情况下都是人工得进行打标,因此一旦需要打标的数据量过多,就会导致效率低下以及可能出错的情况。所以,往往在这时候,需要采取一些计算的方式与策略在已有的数据集上进行手脚,以得到更多的数据。 通俗的讲,数据机扩增即需要得到更多的符合要求的数据,即和已有的数据是独立同分布的,或者近似独立同分布的。一般有以下方法: ——从数据源头采集更多数据 ——复制原有数据加上噪声 ——重采样 ——根据当前数据集估计数据分布参数,利用该分布产生更多数据(3)数据增强 使用数据增强可以生成多幅相似图像。这可以帮助我们增加数据集从而减少过拟合。因为随着数据量的增加,模型无法过拟合所有样本,因此不得不进行泛化。计算机视觉领域通常的做法有:翻转,平移,旋转,缩放,改变亮度,添加噪声等。 (4)正则化 正则化是指在进行目标函数或者代价函数优化时,在目标函数或者代价函数后面加上一个正则项,一般有L1正则和L2正则等。 L1惩罚项的目的是使权重绝对值最小化,公式如下: 图片 L1惩罚项的目的是使权重的平方最小化,公式如下: 图片 下面对两种正则化方法进行了比较: 图片 如果数据过于复杂以致没有办法进行准确的建模,那么L2是更好的选择,因为它能够学习数据中呈现的内在模式。而当数据足够简单,可以精确建模的话,L1更合适,对于我遇到的大多数计算机视觉问题,L2正则化几乎总是可以给出最好的结果。然而L1不容易受到离群值的影响。所以正确的正则化选项取决于我们想要解决的问题。 总结: 正则项是为了降低模型的复杂度,从而避免模型过分拟合训练数据,包括噪声与异常点。从另一个角度讲,正则化即是假设模型参数服从先验概率,即为模型参数添加先验,只是不同的正则化方式的先验分布是不一样的。这样就规定了参数的分布,使得模型的复杂度降低(试想一下,限定条件多了,是不是模型的复杂度就降低了呢),这样模型对于噪声和异常点的抗干扰性的能力增强,从而提高模型的泛化能力。还有个解释,从贝叶斯学派来看,加了先验,在数据少的时候,先验知识可以防止过拟合;从频率学派来看,正则项限定了参数的取值,从而提高了模型的稳定性,而稳定性强的模型不会过拟合,即控制模型空间。 另外一个角度,过拟合从直观上理解便是,在对训练数据进行拟合时,需要照顾到每个点,从而使得拟合函数波动性非常大,即方差大。在某些小区间里,函数值的变化很剧烈,意味着函数在某些小区间的导数值的绝对值非常大,由于自变量的值在给定的训练数据集中是一定的,因为只有系数足够大,才能保证导数的绝对值足够大,如下图: 图片 另一个解释,规则化项的引入,在训练(最小化cost)的过程中,当某一维的特征所对应的权重过大时,而此时模型的预测和真实数据之间的距离很小,通过规则化项就可以使整体的cost取较大的值,从而,在训练的过程中避免了去选择了那些某一维(或几维)特征权重过大的情况,即过分依赖某一维(或几维)的特征。 L1和L2的区别是,L1正则是拉普拉斯先验,L2正则则是高斯先验。它们都是服从均值为0,协方差为1/λ。当λ=0,即没有先验,没有正则项,则相当于先验分布具有无穷大的协方差,那么这个先验约束则会非常弱,模型为了拟合拟合所有的训练集数据,参数可以变得任意大从而使得模型不稳定,即方差大而偏差小。λ越大,表明先验分布协方差越小,偏差越大,模型越稳定。即,加入正则项是在偏差bias与方差variance之间做平衡tradeoff。下图即为L2与L1正则的区别: 图片 上图中的模型是线性回归,有两个特征,要优化的参数分别是w1和w2,左图的正则化是L2,右图是L1。蓝色线就是优化过程中遇到的等高线,一圈代表一个目标函数值,圆心就是样本观测值(假设一个样本),半径就是误差值,受限条件就是红色边界(就是正则化那部分),二者相交处,才是最优参数。可见右边的最优参数只可能在坐标轴上,所以就会出现0权重参数,使得模型稀疏。 其实拉普拉斯分布和高斯分布是数学家从试验中误差服从什么分布研究得出的。一般直观上的认识是服从均值为0的对称分布,并且误差大的概率低,误差小的概率高,因为拉普拉斯使用拉普拉斯分布对误差的分布进行拟合,如下图: 图片 而拉普拉斯在最高点,即自变量为0处不可导,因为不便于计算,于是高斯在这基础上使用高斯分布对其进行拟合,如下图: 图片 (5)dropout 正则时通过再代价函数后面加上正则项来防止过拟合的。而在神经网络中,有一种方法时通过修改神经网络本身结构实现的,其名为dropout。该方法是对网络进行训练时用的一种技巧,对于如下的三层人工神经网络: 图片 对于上图所示的网络,在训练开始时,随即删除一些(可自己设定概率)隐藏层神经元,即认为这些神经元不存在,同时保持输入层和输出层的个数不变,这样便得到如下的ANN: 图片 然后按照BP学习算法对ANN中的参数进行学习更新(虚线链接的单元不更新,因为认为这些连接元被临时删除了)。这样一次迭代更新便完成了,下一次迭代中,同样随机删除一些神经元,与上次不一样,做随机选择,这样一直进行,直至训练结束。 这种技术被证明可以减少很多问题的过拟合,这些问题包括图像分类,图像切割,词嵌入,语义匹配等问题。 (6)早停 对模型的训练即是对模型的参数进行更新的过程,这个参数学习的过程往往会用到一些迭代方法,如梯度下降(Gradient descent)学习算法。Early stopping一种迭代次数截断的方法来防止过拟合的方法,即在模型对训练数据集迭代收敛之前停止迭代来防止过拟合。 Early stopping方法的具体做法是,在每一个Epoch结束时(一个Epoch集为对所有的训练数据的一轮遍历)计算验证集的正确率,当正确率不再提高时,就停止训练。这种做法很符合直观感受,因为正确率都不在提高了,再继续训练也是无益的,只会提高训练的时间。如下图,在几次迭代后,即使训练误差仍然在减少,但测验误差已经开始增加了。 图片 那么该做法的一个重点便是怎样才认为验证准确率validation accurary不再提高了呢?并不是说验证准确率validation accurary一降下来便认为不再提高了,因为可能经过这个Epoch后,正确率降低了,但是随后的Epoch又让正确率又上去了,所以不能根据一两次的连续降低就判断不再提高。一般的做法是,在训练的过程中,记录到目前为止最好的验证准确率validation accurary,当连续10次没达到最佳正确率时,认为不再提高了,此时便可以停止迭代。这种策略也称为“No-improvement-in-n”,n即Epoch的次数,可以根据实际情况取,如10、20、30…… (7)重新清洗数据 把明显异常的数据剔除。 (8)使用集成学习方法 把多个模型集成在一起,降低单个模型的过拟合风险。
机器学习
# 机器学习
刘航宇
2年前
0
1,197
1
2024-01-11
嵌入式常见知识点
图片 1、线程、进程的区别?最小执行单元是进程还是线程? 2、如何计算一个整数是不是2的n次方? 3、printf的具体实现? 4、什么是大小端?如何区分?有几种方法? 5、new与malloc的区别? 6、程序链接完毕之后分几部分? 7、Linux、Windows与FreeRtos的区别? 8、Linux系统中的中断为什么分为上下两个部分? 9、会快速排序吗?简要说一下? 10、static关键字的作用? 11、extern 关键字的作用? 12、volatile关键字的作用? 13、编译原理分哪几步? 14、内存分区? 15、freertos启动流程? 16、互斥锁与信号量的区别? 17、什么是死锁?死锁产生的原因?如何避免? 18、什么是内存泄漏? 19、系统死机了怎么排查原因?逐一看代码?工程量太大了吧? 20、同一类型的结构体定义两个变量能用内存大小来比较判断两者一样吗?(没懂) 21、freertos中EventBits_t是干啥的? 22、freertos使任务切换的方式有哪些? 23、项目中用到网络了吗? 24、了解Socket吗? 25、c++中set是什么? 26、有没有用到C++模板? 27、有没有对代码裁剪的经验 28、freertos系统是买模块时人家配置好的?还是移植的? 29、任务里有两把锁的时候该怎么处理 30、熟悉Shell脚本吗?$和#啥意思? 表示注释的开始,可以用来对代码进行说明,不会被执行,例如#echo hello,#这是一个注释,表示打印hello,后面的内容是一个注释。31、知道#error吗? 32、freertos消息队列的的具体实现? 33、堆栈区别? 34、程序存放状态和区别 1、线程、进程的区别?最小执行单元是进程还是线程? 线程和进程都是程序的执行实体,但是它们有以下区别: 进程是操作系统分配资源的基本单位,每个进程都有自己的独立的地址空间,代码段,数据段,堆栈段等。进程之间的切换需要保存和恢复上下文,开销较大。 线程是操作系统调度的基本单位,每个线程都属于某个进程,一个进程可以有多个线程,它们共享进程的地址空间,但是有自己的栈和寄存器。线程之间的切换只需要保存和恢复少量的寄存器,开销较小。 最小的执行单元是线程,因为一个进程至少要有一个线程,而一个线程可以独立运行。 2、如何计算一个整数是不是2的n次方? 一个整数是2的n次方,当且仅当它的二进制表示中只有一个1,其余都是0。例如,23=8=(1000)2 ,只有一个1。所以,我们可以用以下的方法来判断一个整数x是否是2的n次方: 如果x小于等于0,那么它不是2的n次方。 如果x大于0,那么我们可以用位运算的技巧,将x与x-1做按位与,如果结果为0,那么x是2的n次方,否则不是。例如,8&(8−1)=8&7=(1000)2&(0111)2=(0000)2=0 ,所以8是2的n次方。而9&(9−1)=9&8=(1001)2&(1000)2=(1000)2=0 ,所以9不是2的n次方。 3、printf的具体实现? printf是C语言中的一个标准库函数,用于向标准输出流(通常是屏幕)打印格式化的字符串。它的具体实现可能因编译器和操作系统的不同而有所差异,但是一般来说,它的主要步骤如下: 首先,printf会解析第一个参数,也就是格式化字符串,根据其中的转换说明符(如%d, %f, %s等),确定需要打印的数据类型和格式。 然后,printf会从第二个参数开始,依次获取对应的数据,并将其转换为字符串,拼接到格式化字符串的相应位置。如果参数的个数和类型与格式化字符串不匹配,可能会导致错误或未定义的行为。 最后,printf会调用底层的系统函数,将拼接好的字符串写入到标准输出流中,并返回成功写入的字符数。如果发生错误,返回负值。 4、什么是大小端?如何区分?有几种方法? 大小端是指数据在内存中的存储顺序,大端表示高位字节存放在低地址,低位字节存放在高地址,小端表示高位字节存放在高地址,低位字节存放在低地址。例如,一个32位的整数0x12345678,在大端模式下,存储为0x12 0x34 0x56 0x78,而在小端模式下,存储为0x78 0x56 0x34 0x12。 区分大小端的方法有以下几种: 通过联合体(union)的方式,将一个整数和一个字符数组放在同一个联合体中,然后判断字符数组的第一个元素是不是整数的最低字节,如果是,说明是小端,否则是大端。 通过指针的方式,将一个整数的地址赋给一个字符指针,然后判断指针指向的内容是不是整数的最低字节,如果是,说明是小端,否则是大端。 通过位运算的方式,将一个整数右移24位,然后与0xFF做按位与,得到的结果是不是整数的最高字节,如果是,说明是大端,否则是小端。 5、new与malloc的区别? new和malloc都是用于动态分配内存的,但是它们有以下区别: new是C++中的运算符,malloc是C语言中的函数,它们的用法不同。new可以直接分配对象,而malloc只能分配字节,需要强制类型转换。 new会调用对象的构造函数,初始化对象,而malloc只是分配原始的内存空间,不做任何初始化。 new会根据对象的类型,自动计算所需的内存大小,而malloc需要手动指定分配的字节数。 new分配失败时,会抛出异常,而malloc分配失败时,会返回NULL指针。 new对应的释放内存的运算符是delete,而malloc对应的释放内存的函数是free。 6、程序链接完毕之后分几部分? 程序链接完毕之后,一般分为以下几个部分: 代码段(text segment),存放程序的指令和常量。 数据段(data segment),存放程序的全局变量和静态变量。 堆(heap),存放程序动态分配的内存空间。 栈(stack),存放程序的局部变量,函数参数,返回地址等。 BSS段(bss segment),存放程序未初始化的全局变量和静态变量。 7、Linux、Windows与FreeRtos的区别? Linux、Windows和FreeRtos都是操作系统,但是它们有以下区别: Linux是一个开源的,基于Unix的,多用户,多任务,支持多种硬件平台的操作系统,它有很多不同的发行版,如Ubuntu,RedHat,Debian等。Linux适合用于服务器,嵌入式系统,桌面系统等。 Windows是一个闭源的,基于NT内核的,多用户,多任务,主要支持x86和x64架构的操作系统,它有很多不同的版本,如Windows 10,Windows Server,Windows CE等。Windows适合用于桌面系统,移动设备,游戏机等。 FreeRtos是一个开源的,基于微内核的,实时,多任务,支持多种嵌入式平台的操作系统,它有很多不同的移植,如ARM,MIPS,AVR等。FreeRtos适合用于实时控制,物联网,低功耗设备等。 8、Linux系统中的中断为什么分为上下两个部分? Linux系统中的中断为了提高效率和响应时间,分为上半部(top half)和下半部(bottom half)。上半部是指中断处理程序(interrupt handler),它负责处理中断的紧急事务,如保存寄存器,清除中断标志,识别中断源等。下半部是指中断延迟服务程序(interrupt deferred service routine),它负责处理中断的非紧急事务,如数据传输,设备驱动,信号发送等。上半部和下半部的区别如下: 上半部在中断上下文中执行,下半部在进程上下文中执行。 上半部不能被其他中断打断,下半部可以被其他中断打断。 上半部不能睡眠,下半部可以睡眠。 上半部不能调用可能导致阻塞的函数,如malloc,copy_to_user等,下半部可以调用这些函数。 上半部的执行时间应该尽可能短,下半部的执行时间可以较长。 9、会快速排序吗?简要说一下? 快速排序是一种基于分治思想的排序算法,它的基本步骤如下: 从待排序的数组中选择一个元素作为基准(pivot),通常选择第一个或者最后一个元素。 将数组分成两个子数组,一个子数组中的元素都小于或等于基准,另一个子数组中的元素都大于基准,这个过程称为划分(partition)。 对两个子数组递归地进行快速排序,直到子数组的长度为1或0。 将排好序的子数组合并,得到最终的排序结果。 快速排序的平均时间复杂度是O(nlogn) ,最坏情况是O(n^2) ,空间复杂度是O(logn) ,它是一种不稳定的排序算法。 10、static关键字的作用? static是一个修饰符,它可以用于变量和函数,它有以下作用: 用于全局变量,表示该变量只能在本文件中访问,不能被其他文件引用,这样可以避免命名冲突。 用于局部变量,表示该变量的生命周期是整个程序,而不是函数调用结束,这样可以保持变量的值不被销毁。 用于函数,表示该函数只能在本文件中调用,不能被其他文件引用,这样可以提高函数的封装性和安全性。 11、extern 关键字的作用? extern是一个修饰符,它可以用于变量和函数,它有以下作用: 用于变量,表示该变量是在其他文件中定义的,需要在本文件中引用,这样可以避免重复定义。 用于函数,表示该函数是在其他文件中定义的,需要在本文件中声明,这样可以避免隐式声明。 12、volatile关键字的作用? volatile是一个修饰符,它可以用于变量,它有以下作用: 用于变量,表示该变量可能会被外部因素(如中断,多线程,硬件等)改变,需要每次都从内存中读取,而不是从寄存器或缓存中读取,这样可以保证变量的实时性和一致性。 用于变量,表示该变量不会被编译器优化,需要按照程序的顺序执行,而不是进行重排或删除,这样可以避免编译器的干扰。 13、编译原理分哪几步? 编译原理是指将一种高级语言(源语言)的程序转换为另一种低级语言(目标语言)的程序的原理和方法,它一般分为以下几个步骤: 词法分析(lexical analysis),将源程序的字符序列分割成有意义的单词(token)。 语法分析(syntax analysis),将单词序列组织成语法树(parse tree)或抽象语法树(abstract syntax tree),表示程序的结构和语义。 语义分析(semantic analysis),检查程序是否符合语言的语法规则和语义规则,如类型检查,作用域分析等。 中间代码生成(intermediate code generation),将抽象语法树转换为一种中间表示(intermediate representation),如三地址码,四元式,后缀表达式等,便于优化和目标代码生成。 代码优化(code optimization),对中间表示进行一些变换,以提高程序的执行效率,如常量折叠,公共子表达式消除,循环优化,死代码删除等。 目标代码生成(target code generation),将中间表示转换为目标语言的代码,如汇编语言,机器语言等,同时进行一些分配,如寄存器分配,指令选择等。 14、内存分区? 内存分区是指将物理内存划分为若干个逻辑区域,以便于管理和使用。内存分区的方式有以下几种: 固定分区,将内存分为大小相等或不等的若干个区域,每个区域只能装入一个进程,如果进程的大小超过区域的大小,就会产生内部碎片。 动态分区,根据进程的大小和数量,动态地分配和回收内存空间,每个区域可以装入一个或多个进程,如果进程的大小不是区域的整数倍,就会产生外部碎片。 页式分区,将进程的地址空间划分为大小相等的若干个页,将物理内存划分为大小相等的若干个页框,然后将页映射到页框,实现非连续的内存分配,避免了外部碎片,但是可能产生内部碎片。 段式分区,将进程的地址空间划分为大小不等的若干个段,每个段有自己的逻辑地址和属性,然后将段映射到物理内存,实现非连续的内存分配,避免了内部碎片,但是可能产生外部碎片。 段页式分区,将进程的地址空间划分为若干个段,每个段再划分为若干个页,然后将页映射到物理内存的页框,实现非连续的内存分配,避免了内部碎片和外部碎片,但是增加了地址转换的复杂度。 15、freertos启动流程? freertos是一个实时操作系统,它的启动流程一般如下: 首先,执行硬件初始化,如设置时钟,中断,堆栈等。 然后,执行软件初始化,如创建任务,队列,信号量,定时器等。 接着,调用vTaskStartScheduler ()函数,启动调度器,选择优先级最高的就绪任务运行。 最后,当发生中断,延时,阻塞等事件时,调度器会根据算法,如优先级抢占式,时间片轮转式等,切换任务,实现多任务的并发执行。 16、互斥锁与信号量的区别? 互斥锁(mutex)和信号量(semaphore)都是用于实现多任务的同步和互斥的机制,但是它们有以下区别: 互斥锁是一个二元的同步对象,它只有两种状态:锁定和解锁。一个互斥锁只能被一个任务拥有,当一个任务获取互斥锁后,其他任务就不能再获取该互斥锁,直到拥有者释放它。互斥锁通常用于保护临界区的访问,避免数据的不一致。 信号量是一个计数的同步对象,它有一个初始值,表示可用的资源数量。一个信号量可以被多个任务共享,当一个任务获取信号量后,信号量的值减一,表示资源被占用。当信号量的值为零时,表示没有可用的资源,其他任务就要等待,直到有任务释放信号量,信号量的值加一,表示资源被释放。信号量通常用于实现生产者-消费者模型,控制资源的分配和回收。 17、什么是死锁?死锁产生的原因?如何避免? 死锁是指多个任务因为争夺有限的资源而相互等待,导致无法继续执行的现象。死锁产生的原因一般有以下四个必要条件: 互斥条件,指每个资源只能被一个任务拥有,其他任务不能访问。 占有且等待条件,指一个任务已经占有了至少一个资源,但是又申请了其他已经被占有的资源,同时不释放自己已经占有的资源。 不可抢占条件,指一个任务占有的资源不能被其他任务强行剥夺,只能由占有者主动释放。 循环等待条件,指多个任务形成一个环路,每个任务都在等待下一个任务占有的资源。 避免死锁的方法有以下几种: 破坏互斥条件,使用非互斥的资源,如可复制的资源,或者使用软件技术,如事务,来实现对资源的虚拟访问。 破坏占有且等待条件,要求一个任务在申请资源时,必须一次性申请所有需要的资源,或者在申请新的资源时,必须先释放已经占有的资源。 破坏不可抢占条件,允许一个任务在占有资源时,被其他任务抢占,或者主动释放资源,以满足其他任务的需求。 破坏循环等待条件,给每个资源分配一个优先级,要求一个任务只能申请优先级高于或等于自己已经占有的资源的资源,或者按照一定的顺序申请资源,避免形成环路。 18、什么是内存泄漏? 内存泄漏是指程序在运行过程中,动态分配了一些内存空间,但是没有及时释放,导致这些内存空间无法被其他程序使用,造成内存的浪费和紧张。内存泄漏可能会导致程序的性能下降,甚至崩溃。 19、系统死机了怎么排查原因?逐一看代码?工程量太大了吧? 系统死机是指系统无法响应用户的输入,或者出现异常的错误,导致系统无法正常运行。排查系统死机的原因有以下几种方法: 通过日志文件,查看系统在死机前的运行状态,是否有异常的信息,如错误码,警告,断言等,以及死机的时间,位置,频率等,从而定位可能的问题源。 通过调试工具,如gdb,lldb等,对系统进行调试,查看系统的内存,寄存器,堆栈,断点等,分析系统的运行流程,发现潜在的错误,如内存泄漏,空指针,死锁等。 通过测试工具,如valgrind,asan等,对系统进行测试,检测系统的内存管理,性能,覆盖率等,发现系统的缺陷,如内存错误,资源泄漏,性能瓶颈等。 通过代码审查,对系统的代码进行分析,检查代码的风格,规范,逻辑,注释等,发现代码的不合理,不一致,不完善等,提高代码的质量,可读性,可维护性等。 通过重现问题,对系统的死机现象进行复现,观察系统的表现,输入,输出等,找出问题的触发条件,规律,范围等,缩小问题的范围,提高问题的可解决性。 20、同一类型的结构体定义两个变量能用内存大小来比较判断两者一样吗?(没懂) 同一类型的结构体定义两个变量,不能用内存大小来比较判断两者一样,因为内存大小只能反映结构体的占用空间,而不能反映结构体的内容。例如,以下两个结构体变量的内存大小都是8字节,但是它们的内容是不一样的: struct Point { int x; int y; }; struct Point p1 = {1, 2}; struct Point p2 = {3, 4}; 如果要比较两个结构体变量是否一样,需要逐个比较它们的成员,或者使用memcmp函数比较它们的内存内容。例如: // 逐个比较 if (p1.x == p2.x && p1.y == p2.y) { printf("p1 and p2 are equal\n"); } else { printf("p1 and p2 are not equal\n"); } // 使用memcmp比较 if (memcmp(&p1, &p2, sizeof(struct Point)) == 0) { printf("p1 and p2 are equal\n"); } else { printf("p1 and p2 are not equal\n"); }21、freertos中EventBits_t是干啥的? EventBits_t是一个数据类型,它用于表示事件标志组(event group)中的每个位的状态,每个位可以表示一个事件的发生或者一个条件的满足。EventBits_t通常是一个无符号整数,它可以使用位运算来设置,清除,读取或等待事件标志。 22、freertos使任务切换的方式有哪些? freertos使任务切换的方式有以下几种: 时间片轮转法,按照任务的优先级和时间片的长度,依次轮流执行每个就绪任务,当一个任务的时间片用完或者主动放弃时,切换到下一个任务。 优先级抢占法,按照任务的优先级,总是执行优先级最高的就绪任务,当有更高优先级的任务就绪时,立即抢占当前任务,切换到更高优先级的任务。 混合法,结合时间片轮转法和优先级抢占法,对于同一优先级的任务,使用时间片轮转法,对于不同优先级的任务,使用优先级抢占法,实现任务的公平性和效率。 23、项目中用到网络了吗? 这个问题的答案取决于你的项目的具体情况,如果你的项目需要与其他设备或服务器进行通信,或者需要访问互联网上的资源,那么你的项目就用到了网络。如果你的项目只是在本地运行,不需要与外界交互,那么你的项目就没有用到网络。 24、了解Socket吗? Socket是一种通信机制,它可以实现不同进程或不同设备之间的数据交换。Socket通常基于TCP/IP协议,提供了可靠的,双向的,面向连接的通信服务。Socket的基本操作包括创建,绑定,监听,连接,发送,接收,关闭等。Socket的编程接口通常是一组函数或类,不同的编程语言或平台可能有不同的实现,如C语言的socket.h,Java语言的java.net.Socket等。 25、c++中set是什么? set是C++标准模板库(STL)中的一个容器,它可以存储一组不重复的元素,并且按照一定的顺序排列。set的元素可以是任意类型,但是必须支持比较操作,如<,==等。set的底层实现通常是红黑树,所以它的插入,删除,查找等操作的时间复杂度都是O(logn) ,其中n是元素的个数。set的优点是可以快速地检查一个元素是否存在,以及保持元素的有序性。set的缺点是不能存储重复的元素,以及不能直接访问元素,只能通过迭代器遍历。 26、有没有用到C++模板? C++模板是一种泛型编程的技术,它可以让程序员定义一种通用的模式,然后根据不同的类型或参数,生成不同的代码,从而实现代码的复用和抽象。C++模板有两种,一种是函数模板,用于定义通用的函数,另一种是类模板,用于定义通用的类。例如,以下是一个函数模板,用于比较两个值的大小: template <typename T> T max(T x, T y) { return (x > y) ? x : y; } 我有用过C++模板,它们可以让我的代码更简洁,更灵活,更高效。我用过STL中的一些类模板,如vector,map,set等,也用过自己定义的一些函数模板和类模板,来实现一些通用的算法和数据结构。 27、有没有对代码裁剪的经验 代码裁剪是指对代码进行优化,删除不必要的或冗余的代码,减少代码的体积和复杂度,提高代码的可读性和可维护性。代码裁剪的目的是为了提高程序的性能,节省内存空间,降低编译时间,避免错误和漏洞等。 我有对代码裁剪的经验,我用过一些工具和方法来进行代码裁剪,如: 使用编译器的优化选项,如-Os,-O3等,让编译器自动进行一些代码裁剪,如常量折叠,死代码删除,循环展开等。 使用代码分析工具,如lint,coverity等,检查代码的质量,发现代码的缺陷,如未使用的变量,函数,参数等,以及代码的风格,规范,注释等,然后根据工具的建议,修改或删除代码。 使用代码重构工具,如refactor,eclipse等,对代码进行重构,改善代码的结构,设计,逻辑等,消除代码的冗余,重复,复杂等,提高代码的可读性,可维护性,可扩展性等。 使用代码压缩工具,如upx,gzip等,对代码进行压缩,减少代码的体积,提高代码的传输速度,节省存储空间等。 28、freertos系统是买模块时人家配置好的?还是移植的? freertos系统是一个开源的,可移植的,实时的操作系统,它可以运行在多种嵌入式平台上,如ARM,MIPS,AVR等。freertos系统不是买模块时人家配置好的,而是需要根据不同的硬件和需求进行移植和定制的。移植freertos系统的步骤一般如下: 下载freertos的源码,选择合适的移植层,如portable/GCC/ARM_CM3等,根据目标平台的特性,修改一些配置参数,如configCPU_CLOCK_HZ,configTICK_RATE_HZ等。 编写启动代码,如设置时钟,中断,堆栈等,调用vPortStartFirstTask ()函数,启动第一个任务。 编写应用代码,如创建任务,队列,信号量,定时器等,调用vTaskStartScheduler ()函数,启动调度器。 编译,链接,下载,调试代码,检查系统的运行情况,如任务切换,中断响应,内存管理等。 29、任务里有两把锁的时候该怎么处理 任务里有两把锁的时候,可能会出现死锁的问题,即两个或多个任务因为互相等待对方占有的锁而无法继续执行。处理任务里有两把锁的时候,有以下几种方法: 避免使用两把锁,如果可能的话,尽量使用一把锁来保护临界区,或者使用其他同步机制,如信号量,事件标志等,来实现任务之间的协作。 按照一定的顺序获取和释放锁,如果必须使用两把锁,那么要求所有的任务都按照相同的顺序获取和释放锁,避免形成循环等待的条件。 使用超时机制,如果一个任务在获取锁时,发现锁已经被占用,那么不要无限期地等待,而是设置一个超时时间,如果超时时间到了,还没有获取到锁,那么就放弃获取,释放已经占有的锁,然后重新尝试或者执行其他操作。 使用优先级继承机制,如果一个任务在获取锁时,发现锁已经被占用,那么就把自己的优先级赋给占有锁的任务,让占有锁的任务尽快执行完毕,释放锁,然后恢复原来的优先级,这样可以避免优先级反转的问题。 30、熟悉Shell脚本吗?$和#啥意思? Shell脚本是一种用于控制Unix或Linux系统的命令行解释器,它可以实现一些自动化的任务,如文件操作,文本处理,程序运行等。Shell脚本的语法和结构类似于C语言,但是更加简洁和灵活。Shell脚本的文件名通常以.sh为后缀,例如test.sh。 $和#是Shell脚本中的两个特殊符号,它们有以下含义: $表示变量的引用,可以用来获取或设置变量的值,例如x=10,echo $x,表示将10赋值给变量x,然后打印x的值。 表示注释的开始,可以用来对代码进行说明,不会被执行,例如#echo hello,#这是一个注释,表示打印hello,后面的内容是一个注释。 31、知道#error吗? 、#error是一个预处理指令,它可以用来在编译时产生一个错误信息,中断编译过程。#error通常用来检查一些条件,如宏定义,平台,版本等,如果不满足条件,就提示错误,防止编译出错的代码。例如: #ifdef __linux__ #error This code is not compatible with Linux #endif 这段代码表示如果定义了__linux__宏,就产生一个错误信息,表示这段代码不兼容Linux系统。 32、freertos消息队列的的具体实现? freertos消息队列是一种用于实现任务之间或任务与中断之间的异步通信的机制,它可以存储一组有序的消息,每个消息可以是任意类型的数据。freertos消息队列的具体实现如下: 消息队列是一个结构体,它包含了一些成员,如队列的头指针,尾指针,长度,容量,锁,信号量等,用来管理队列的状态和操作。 消息队列的存储空间是一个数组,它可以是静态分配的或动态分配的,它的大小要能够容纳队列的最大容量乘以每个消息的大小。 消息队列的操作有以下几种,如创建,删除,发送,接收等,它们都是通过调用一些API函数来实现的,如xQueueCreate,vQueueDelete,xQueueSend,xQueueReceive等。 消息队列的操作都是原子的,即在操作过程中,不会被其他任务或中断打断,这是通过使用临界区或中断屏蔽来实现的,以保证队列的一致性和完整性。 消息队列的操作都是阻塞的,即如果队列满了,就不能发送消息,如果队列空了,就不能接收消息,这是通过使用信号量来实现的,以实现任务的同步和等待。 33、堆栈区别? 堆(heap)和栈(stack)都是程序运行时使用的内存空间,但是它们有以下区别: 堆是动态分配的,程序员可以自由地申请和释放堆上的内存空间,堆的大小受到物理内存的限制,堆上的内存空间的地址是不连续的。 栈是静态分配的,编译器会自动地分配和回收栈上的内存空间,栈的大小受到操作系统的限制,栈上的内存空间的地址是连续的。 堆是全局共享的,堆上的内存空间可以被任何函数或模块访问,堆上的内存空间的生命周期是由程序员控制的,如果不及时释放,可能会导致内存泄漏。 栈是局部私有的,栈上的内存空间只能被当前函数或模块访问,栈上的内存空间的生命周期是由编译器控制的,当函数调用结束时,栈上的内存空间就会被自动释放。 34、程序存放状态和区别 程序存放状态是指程序在运行过程中的不同阶段,它有以下几种: 新建状态,指程序刚刚被创建,还没有被加载到内存中,等待调度器的调度。 就绪状态,指程序已经被加载到内存中,已经分配了必要的资源,等待处理器的分配。 运行状态,指程序已经被分配了处理器,正在执行程序的指令。 阻塞状态,指程序在执行过程中,因为等待某些事件的发生,如输入输出,信号量,中断等,而暂时停止执行,释放处理器,等待事件的完成。 终止状态,指程序已经执行完毕,或者因为某些原因,如错误,异常,中断等,而被终止,释放内存和资源,从系统中消失。
嵌入式&系统
# 嵌入式
刘航宇
2年前
0
647
4
嵌入式/SOC开发利器-ZYNQ简介与入门
ZYNQ是什么? ZYNQ为什么厉害 ZYNQ的结构 开发工具 ZYNQ开发流程 ZYNQ是什么? 这是一款由Xilinx公司开发的集成了ARM处理器和FPGA可编程逻辑的片上系统(SoC)芯片。ZYNQ7000有多个型号,根据处理器核心数和FPGA系列的不同,可以应用于多种领域,如图像处理,通信,嵌入式系统等。 ZYNQ中国人读法 “zingke”、“任克”,“Soc”,英文全称叫 System on one Chip ,也就是片上系统的意思。没有微机基础的同学可能不明白什么叫Soc,但是你可以细细琢磨一下,我们的手机和台式电脑的不同,你就可以理解Soc的内含了。 传统计算机是将CPU,内存,GPU,南北桥焊接在印刷电路板上,各个组件之间是分立的。但是Soc则将CPU和各种外设集中到一块芯片上,集合成一个系统,因此像手机这种使用了Soc芯片的这种微机可以做的很轻薄,我们可以说,Soc是未来微机发展的一个趋势,我之前遇见过的像什么全志的A33就是典型的Soc。 ZYNQ为什么厉害 就在于它是一块可编程的Soc。其内部往往有处理器硬核和一些定制外设,并且外设当中有一个很厉害的玩意:PL,即可编程逻辑模块,也就是我们一般意义上的FPGA,所以简单理解ZYNQ就是“ 单片机 + FPGA “,它既可以执行代码程序,也可以实现FPGA。因此我们设计ZYNQ就是在做Soc设计。 ZYNQ的结构 我们先来开一下简化版的模型 图片 上面的模型细致低展开后就是下图的样子: 图片 图是 ZYNQ 7000的结构图,大体分为PS(Processing System)和 PL(Programmable Logic)两部分,其中的PS部分主要是由双核APU和外围的一些外设组成,说实话很像单片机的结构,而外围的PL则类似FPGA,并且两者通过AXI接口进行互联以实现功能. 重点介绍一下APU,应用处理单元:Application Processing Unit,位于PS(processing system)中,包括一个单核或者双核的cortex-A9处理器,处理器连接一个512KB的共享L2cache,每个处理器都有一个32KB的高速L1 cache,A9支持虚拟内存和32bit arm 指令。APU中的A9处理器由可配置的MP组成,MP包含SCU(snoop control unit:监控控制单元)单元,这个单元主要负责获取两个处理器的L1 cache和ACP(accelerator coherency port:加速器相关接口) PL的一致性。应用单元还有一个低延迟的片上memory,与L2 cache并行的,ACP(加速器接口)是PL与APU通信接口,该接口是PL作为主机的AXI协议的接口,最多支持64bit位宽,PL通过ACP接口访问L2 cache 和片上memory,同时保持和L1 cache的内存一致性。L2 cache 可以访问 DDR 控制,这个ddr 控制器是专用的,大大降低内存读写的延迟APU 还包括一个32bit的看门狗,一个64bit的全局定时器,APU 架构图如下所示: 图片 开发工具 在Vivado 19.2之前,我们开发Zynq需要三样必须的软件: Vivado SDK PetaLinux 其中Vivado用来开发硬件平台,SDK开发软件,PetaLinux则制作配套的Linux系统。可能有些人还有用到HLS ,即VIvado HLS 或者Vitis HLS;其中Vivado HLS 2020.1将是Vivado HLS的最后一个版本,取而代之的是VitisHLS。 到了Vivado 19.2之后,事情发生了变化。为了方便大家理解,我愿意称之这些软件成了为Vitis 家族的各个部分,原来的SDK被Vitis IDE取代,Vivado导出的 .hdf 文件被 .xsa文件代替,用来给vitis平台使用。因此我们需要的开发Zynq 最基本的软件变成了 Vivado Vitis IDE PetaLinux 各软件发挥的作用和之前的差不多,不过除了上面提到的四款软件外,Vitis家族还有 Vitis AI 等组件,他们共同组成了所谓的“Vitis™ Unified Software Platform ”,从发展趋势来看,这些开发软件应该会逐步的统一,入门的同学也不会再一头雾水地纠结 Vitis 和 Vivado 的区别和联系了。 ZYNQ开发流程 ZYNQ类似于一个 单片机 + FPGA的结构,其实我觉得如果大家接触过一些 Soc就会更好地理解ZYNQ的作用,就例如全志A33这块Soc,它是一块ASIC,不可以通过编程来对芯片的硬件进行重设计的。 图片 我们可以看到,灰色部分的外设都是固定的,像什么摄像头接口,什么视频接口都是设计好的,定制化的好处就使得总体比较高效,制造成本也低;但是如果我要运用到其它场景下,比如说我需要多个摄像头,那这块芯片就不再适合了(硬件控制的上限就是前后两颗摄像头) 而ZYNQ的意义相当于只给你定制的蓝色部分,也就是处理器内核,灰色的部分都可以通过FPGA实现,这让电子工程师们可以快速开发出各种各样有针对性的Soc;当然了,看过我第一篇博客的同学都知道,其实固定的硬核不止只有处理器内核,其实还有串口和内存控制器之类的外设,这其实是追寻一种固定和变化之间的平衡。 咱们把话说回ZYNQ的开发上来。 图片 ZYNQ的开发流程分为硬件和软件两部分,在SDK之前的属于硬件开发,也就是我们常说的PL部分的开发,而SDK后就属于软件部分的开发了,类似单片机,属于PS部分。当然现在最新的Vitis IDE已经取代了SDK,所以后半部分一般在SDK中进行。 PL部分的开发包括对 嵌入式最小系统的构建,以及FPGA外设的设计两个方面。我觉得要转变的一个思维是,我们现在不是在开发一个什么SDRAM控制器,什么IIC协议控制器,我们在开发的是一个小型的微机系统!因此嵌入式最小系统的设计是我们的核心。 首先,在IP INTEGRATOR中我们要创建BLOCK DESIGN。 图片 IP是用来进行 Embedded System Design ,也就是咱们常说的嵌入式系统设计。也就是咱们上面说的嵌入式最小系统的设计。 图片 大家可以看到,一个最小的系统其实不需要PL参与的,PL可以作为PS的一个外设使用,或者是自己做自己的事情,仅仅作为一个PL工作。既然是外设,当然是可用可不用的,毕竟咱们有好多的外设可以在Block Design 中直接配置使用,即下图绿色部分。 图片 配置好嵌入式系统后,咱们根据需要进行PL部分的设计。这里涉及一个问题,那就是PS和PL之间的数据传输方式有哪些: 中断 IO方式:MIO EMIO GPIO BRAM或FIFO或EMIF AXI DMA:PS通过AXI-lite向AXI DMA发送指令,AXI DMA通过HP通路和DDR交换数据,PL通过AXI-S读写DMA的数据。 等等。。。 可以看出,其实两个部分的交互方式还是很多的,以后咱们遇到一个说一个。 在Vivado端完成对嵌入式系统的设计后,我们就要进入Vitis IDE 端进行软件的开发。 图片 Vitis IDE简单来说流程一般是:新建一个工程,选择Platform ,也就是我们之前在Vivado中生成的 XSA文件,然后添加文件,进行开发。我相信使用过Keil 5的同学们应该心中对文件目录结构应该更胸有成竹,Src文件夹中存放的是源文件。 代码编写完之后是编译,编译完就是下载了。不过这里要注意以下,如果我们使用了PL的资源,那么在下载软件编译生成的 elf 文件之前,需要先下载硬件设计过程中生成的 bitstream 文件,对 PL 部分进行配置。 最后就是验证工作了,上述的流程是普通的ZYNQ开发流程;玩的花一点的同学可能是直接上Linux操作系统,这部分等后面我接触到了再说吧! 其实我觉得ZYNQ入门简单,精通的话需要大量的知识储备,但也不是不可能,开发ZYNQ相比于做单片机开发肯定路子会更广一些,向上可以做IC设计,向下嵌入式、单片机什么的工作也能胜任。
FPGA&ASIC
IP&SOC设计
# ASIC/FPGA
# 嵌入式
# SOC设计
刘航宇
3年前
0
4,214
4
2023-11-01
机器学习/深度学习-10个激活函数详解
图片 综述 1. Sigmoid 激活函数 2. Tanh / 双曲正切激活函数 3. ReLU 激活函数 4. Leaky ReLU 5. ELU 6. PReLU(Parametric ReLU) 7. Softmax 8. Swish 9. Maxout 10. Softplus 综述 激活函数(Activation Function)是一种添加到人工神经网络中的函数,旨在帮助网络学习数据中的复杂模式。类似于人类大脑中基于神经元的模型,激活函数最终决定了要发射给下一个神经元的内容。 在人工神经网络中,一个节点的激活函数定义了该节点在给定的输入或输入集合下的输出。标准的计算机芯片电路可以看作是根据输入得到开(1)或关(0)输出的数字电路激活函数。因此,激活函数是确定神经网络输出的数学方程式,本文概述了深度学习中常见的十种激活函数及其优缺点。 首先我们来了解一下人工神经元的工作原理,大致如下: 图片 上述过程的数学可视化过程如下图所示: 图片 1. Sigmoid 激活函数 lofj8ajx.png图片 Sigmoid 函数的图像看起来像一个 S 形曲线。 函数表达式如下: $$\[\mathrm{f(z)=1/(1+e^{\wedge}-z)}\]$$ 在什么情况下适合使用 Sigmoid 激活函数呢? Sigmoid 函数的输出范围是 0 到 1。由于输出值限定在 0 到 1,因此它对每个神经元的输出进行了归一化; 用于将预测概率作为输出的模型。由于概率的取值范围是 0 到 1,因此 Sigmoid 函数非常合适; 梯度平滑,避免「跳跃」的输出值; 函数是可微的。这意味着可以找到任意两个点的 sigmoid 曲线的斜率; 明确的预测,即非常接近 1 或 0。 Sigmoid 激活函数有哪些缺点? 倾向于梯度消失; 函数输出不是以 0 为中心的,这会降低权重更新的效率; Sigmoid 函数执行指数运算,计算机运行得较慢。 2. Tanh / 双曲正切激活函数 图片 tanh 激活函数的图像也是 S 形,表达式如下: $$f(x)=tanh(x)=\frac{2}{1+e^{-2x}}-1$$ tanh 是一个双曲正切函数。tanh 函数和 sigmoid 函数的曲线相对相似。但是它比 sigmoid 函数更有一些优势。 图片 首先,当输入较大或较小时,输出几乎是平滑的并且梯度较小,这不利于权重更新。二者的区别在于输出间隔,tanh 的输出间隔为 1,并且整个函数以 0 为中心,比 sigmoid 函数更好; 在 tanh 图中,负输入将被强映射为负,而零输入被映射为接近零。 注意:在一般的二元分类问题中,tanh 函数用于隐藏层,而 sigmoid 函数用于输出层,但这并不是固定的,需要根据特定问题进行调整。 3. ReLU 激活函数 图片 ReLU 激活函数图像如上图所示,函数表达式如下: 图片 ReLU 函数是深度学习中较为流行的一种激活函数,相比于 sigmoid 函数和 tanh 函数,它具有如下优点: 当输入为正时,不存在梯度饱和问题。 计算速度快得多。ReLU 函数中只存在线性关系,因此它的计算速度比 sigmoid 和 tanh 更快 当然,它也有缺点: Dead ReLU 问题。当输入为负时,ReLU 完全失效,在正向传播过程中,这不是问题。有些区域很敏感,有些则不敏感。但是在反向传播过程中,如果输入负数,则梯度将完全为零,sigmoid 函数和 tanh 函数也具有相同的问题; 我们发现 ReLU 函数的输出为 0 或正数,这意味着 ReLU 函数不是以 0 为中心的函数。 4. Leaky ReLU 它是一种专门设计用于解决 Dead ReLU 问题的激活函数: 图片 ReLU vs Leaky ReLU 为什么 Leaky ReLU 比 ReLU 更好? $$f(y_i)=\begin{cases}y_i,&\text{if }y_i>0\\a_iy_i,&\text{if }y_i\leq0\end{cases}.$$ 1、Leaky ReLU 通过把 x 的非常小的线性分量给予负输入(0.01x)来调整负值的零梯度(zero gradients)问题; 2、leak 有助于扩大 ReLU 函数的范围,通常 a 的值为 0.01 左右; 3、Leaky ReLU 的函数范围是(负无穷到正无穷)。 注意:从理论上讲,Leaky ReLU 具有 ReLU 的所有优点,而且 Dead ReLU 不会有任何问题,但在实际操作中,尚未完全证明 Leaky ReLU 总是比 ReLU 更好。 5. ELU 图片 ELU vs Leaky ReLU vs ReLU ELU 的提出也解决了 ReLU 的问题。与 ReLU 相比,ELU 有负值,这会使激活的平均值接近零。均值激活接近于零可以使学习更快,因为它们使梯度更接近自然梯度。 图片 显然,ELU 具有 ReLU 的所有优点,并且: 没有 Dead ReLU 问题,输出的平均值接近 0,以 0 为中心; ELU 通过减少偏置偏移的影响,使正常梯度更接近于单位自然梯度,从而使均值向零加速学习; ELU 在较小的输入下会饱和至负值,从而减少前向传播的变异和信息。 一个小问题是它的计算强度更高。与 Leaky ReLU 类似,尽管理论上比 ReLU 要好,但目前在实践中没有充分的证据表明 ELU 总是比 ReLU 好。 6. PReLU(Parametric ReLU) 图片 PReLU 也是 ReLU 的改进版本: $$f(y_i)=\begin{cases}y_i,&\text{if }y_i>0\\a_iy_i,&\text{if }y_i\leq0\end{cases}.$$ 看一下 PReLU 的公式:参数α通常为 0 到 1 之间的数字,并且通常相对较小。 如果 a_i= 0,则 f 变为 ReLU 如果 a_i> 0,则 f 变为 leaky ReLU 如果 a_i 是可学习的参数,则 f 变为 PReLU PReLU 的优点如下: 在负值域,PReLU 的斜率较小,这也可以避免 Dead ReLU 问题。 与 ELU 相比,PReLU 在负值域是线性运算。尽管斜率很小,但不会趋于 0。 7. Softmax 图片 Softmax 是用于多类分类问题的激活函数,在多类分类问题中,超过两个类标签则需要类成员关系。对于长度为 K 的任意实向量,Softmax 可以将其压缩为长度为 K,值在(0,1)范围内,并且向量中元素的总和为 1 的实向量。 图片 Softmax 与正常的 max 函数不同:max 函数仅输出最大值,但 Softmax 确保较小的值具有较小的概率,并且不会直接丢弃。我们可以认为它是 argmax 函数的概率版本或「soft」版本。 Softmax 函数的分母结合了原始输出值的所有因子,这意味着 Softmax 函数获得的各种概率彼此相关。 Softmax 激活函数的主要缺点是: 在零点不可微; 负输入的梯度为零,这意味着对于该区域的激活,权重不会在反向传播期间更新,因此会产生永不激活的死亡神经元。 8. Swish 图片 函数表达式:y = x * sigmoid (x) Swish 的设计受到了 LSTM 和高速网络中 gating 的 sigmoid 函数使用的启发。我们使用相同的 gating 值来简化 gating 机制,这称为 self-gating。 self-gating 的优点在于它只需要简单的标量输入,而普通的 gating 则需要多个标量输入。这使得诸如 Swish 之类的 self-gated 激活函数能够轻松替换以单个标量为输入的激活函数(例如 ReLU),而无需更改隐藏容量或参数数量。 Swish 激活函数的主要优点如下: 「无界性」有助于防止慢速训练期间,梯度逐渐接近 0 并导致饱和;(同时,有界性也是有优势的,因为有界激活函数可以具有很强的正则化,并且较大的负输入问题也能解决); 导数恒 > 0; 平滑度在优化和泛化中起了重要作用。 9. Maxout 图片 在 Maxout 层,激活函数是输入的最大值,因此只有 2 个 maxout 节点的多层感知机就可以拟合任意的凸函数。 单个 Maxout 节点可以解释为对一个实值函数进行分段线性近似 (PWL) ,其中函数图上任意两点之间的线段位于图(凸函数)的上方。 $ReLU=\max\bigl(0,x\bigr),\mathrm{abs}\bigl(x\bigr)=\max\bigl(x,-x\bigr)$ Maxout 也可以对 d 维向量(V)实现: 图片 假设两个凸函数 h_1(x) 和 h_2(x),由两个 Maxout 节点近似化,函数 g(x) 是连续的 PWL 函数。 $$g\bigl(x\bigr)=h_1\bigl(x\bigr)-h_2\bigl(x\bigr)$$ 因此,由两个 Maxout 节点组成的 Maxout 层可以很好地近似任何连续函数。 图片 10. Softplus 图片 Softplus 函数:f(x)= ln(1 + exp x) Softplus 的导数为 f ′(x)=exp(x) / ( 1+exp x ) = 1/ (1 +exp(−x )) ,也称为 logistic / sigmoid 函数。 Softplus 函数类似于 ReLU 函数,但是相对较平滑,像 ReLU 一样是单侧抑制。它的接受范围很广:(0, + inf)。
机器学习
# 机器学习
# 软件算法
# DL/ML
刘航宇
3年前
0
628
0
2023-10-15
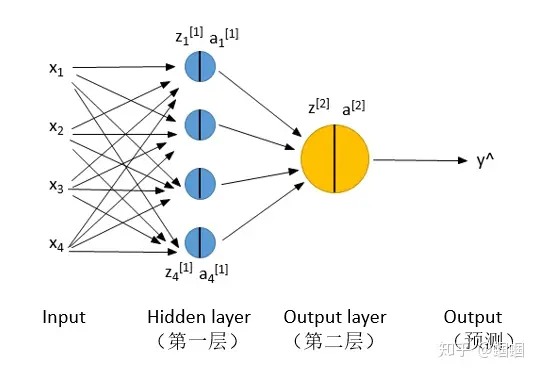
DL-神经网络的正向传播与反向传播
神经网络简述 前向传播 反向传播 四、深层神经网络(Deep Neural Network) 1.单个神经元 2.由神经元组成的神经网络 3.目标函数 4.求解损失函数对某个权值的梯度 5.反向传播算法Backpropgation 5.2 计算一个梯度 5.3 反向传播误差 6.优化示例 神经网络简述 神经网络,就是在Logistic regression的基础上增加了一个或几个隐层(hidden layer),下面展示的是一个最最最简单的神经网络,只有两层: 两层神经网络 图片 需要注意的是,上面的图是“两层”,而不是三层或者四层,输入和输出不算层! 这里,我们先规定一下记号(Notation): z是x和w、b线性运算的结果,z=wx+b; a是z的激活值; 下标的1,2,3,4代表该层的第i个神经元(unit); 上标的[1],[2]等代表当前是第几层。 y^代表模型的输出,y才是真实值,也就是标签 另外,有一点经常搞混: 上图中的x1,x2,x3,x4不是代表4个样本!而是一个样本的四个特征(4个维度的值)! 你如果有m个样本,代表要把上图的过程重复m次: 图片 神经网络的“两个传播”: 前向传播(Forward Propagation)前向传播就是从input,经过一层层的layer,不断计算每一层的z和a,最后得到输出y^ 的过程,计算出了y^,就可以根据它和真实值y的差别来计算损失(loss)。 反向传播(Backward Propagation)反向传播就是根据损失函数L(y^,y)来反方向地计算每一层的z、a、w、b的偏导数(梯度),从而更新参数。 前向传播和反向传播: 图片 每经过一次前向传播和反向传播之后,参数就更新一次,然后用新的参数再次循环上面的过程。这就是神经网络训练的整个过程。 前向传播 如果用for循环一个样本一个样本的计算,显然太慢,是使用Vectorization,把m个样本压缩成一个向量X来计算,同样的把z、a都进行向量化处理得到Z、A,这样就可以对m的样本同时进行表示和计算了。不熟悉的朋友可以看这里: 这样,我们用公式在表示一下我们的两层神经网络的前向传播过程: Layer 1:Z[1] = W[1]·X + b[1]A[1] = σ(Z[1]) Layer 2:Z[2] = W[2]·A[1] + b[2]A[2] = σ(Z[2]) 而我们知道,X其实就是A[0],所以不难看出:每一层的计算都是一样的: Layer i:Z[i] = W[i]·A[i-1] + b[i]A[i] = σ(Z[i]) (注:σ是sigmoid函数) 因此,其实不管我们神经网络有几层,都是将上面过程的重复。 对于 损失函数,就跟Logistic regression中的一样,使用 “交叉熵(cross-entropy)”,公式就是 二分类问题:L(y^,y) = -[y·log(y^ )+(1-y)·log(1-y^ )]- 多分类问题:L=-Σy(j)·y^(j) 这个是每个样本的loss,我们一般还要计算整个样本集的loss,也称为cost,用J表示,J就是L的平均: J(W,b) = 1/m·ΣL(y^(i),y(i)) 上面的求Z、A、L、J的过程就是正向传播。 反向传播 反向传播说白了根据根据J的公式对W和b求偏导,也就是求梯度。因为我们需要用梯度下降法来对参数进行更新,而更新就需要梯度。 但是,根据求偏导的链式法则我们知道,第l层的参数的梯度,需要通过l+1层的梯度来求得,因此我们求导的过程是“反向”的,这也就是为什么叫“反向传播”。 具体求导的过程,这里就不赘述了。像各种 深度学习框架TensorFlow、Keras,它们都是 只需要我们自己构建正向传播过程, 反向传播的过程是自动完成的,所以大家也确实不用操这个心。 进行了反向传播之后,我们就可以根据每一层的参数的梯度来更新参数了,更新了之后,重复正向、反向传播的过程,就可以不断训练学习更好的参数了。 四、深层神经网络(Deep Neural Network) 前面的讲解都是拿一个两层的很浅的神经网络为例的。 深层神经网络也没什么神秘,就是多了几个/几十个/上百个hidden layers罢了。 可以用一个简单的示意图表示: 深层神经网络: 图片 注意,在深层神经网络中,我们在中间层使用了 “ReLU”激活函数,而不是sigmoid函数了,只有在最后的输出层才使用了sigmoid函数,这是因为 ReLU函数在求梯度的时候更快,还可以一定程度上防止梯度消失现象,因此在深层的网络中常常采用。 关于深层神经网络,我们有必要再详细的观察一下它的结构,尤其是 每一层的各个变量的维度,毕竟我们在搭建模型的时候,维度至关重要。 图片 我们设: 总共有m个样本,问题为二分类问题(即y为0,1); 网络总共有L层,当前层为l层(l=1,2,...,L); 第l层的单元数为n[l];那么下面参数或变量的维度为: W[l]:(n[l],n[l-1])(该层的单元数,上层的单元数) b[l]:(n[l],1) z[l]:(n[l],1) Z[l]:(n[l],m) a[l]:(n[l],1) A[l]:(n[l],m) X:(n[0],m) Y:(1,m) 可能有人问,为什么 W和b的维度里面没有m? 因为 W和b对每个样本都是一样的,所有样本采用同一套参数(W,b), 而Z和A就不一样了,虽然计算时的参数一样,但是样本不一样的话,计算结果也不一样,所以维度中有m。 深度神经网络的正向传播、反向传播和前面写的2层的神经网络类似,就是多了几层,然后中间的激活函数由sigmoid变为ReLU了。 1.单个神经元 神经网络是由一系列神经元组成的模型,每一个神经元实际上做得事情就是实现非线性变换。 如下图就是一个神经元的结构: 图片 神经元将两个部分:上一层的输出(x1,x2,....,xn)与权重(w1,w2,....,wn),对应相乘相加,然后再加上一个偏置 b之后的值经过激活函数处理后完成非线性变换。 记 z = w ⋅ x + b ,a=σ(z),则 z 是神经元非线性变换之前的结果,这部分仅仅是一个简单的线性函数。σ 是Sigmod激活函数,该函数可以将无穷区间内的数映射到(-1,1)的范围内。a 是神经元将 z z 进行非线性变换之后的结果。 Sigmod函数图像如下图 $$\mathrm{sigmod(x)=\frac{1}{1+e^{-x}}}$$ 图片 因此,结果 a 就等于: 图片 这里再强调一遍,神经元的本质就是做非线性变换 2.由神经元组成的神经网络 神经元可以理解成一个函数,神经网络就是由很多个非线性变换的神经元组成的模型,因此神经网络可以理解成是一个非常复杂的复合函数。 图片 对于上图中的网络: (x1,x2,....,xn)为n维输入向量 Wij,表示后一层低i个神经元与前一层第j个神经元之间的权值 z = Wx + b是没有经过激活函数非线性变换之前的结果 a=σ(z),是 z 经过激活函数非线性变换之后的结果 \mathrm{s=U^Ta},为网络最终的输出结果。 3.目标函数 以折页损失为目标函数: $$\mathrm{minmizeJ}=\max(\Delta+s_{c}-s,0)$$ 其中$\mathrm{s_c=U^T\sigma(Wx_c+b),s=U^T\sigma(Wx+b)}$。一般可以把$\Delta$固定下来,比如设为1或者10。 一般来说,学习算法的学习过程就是优化调整参数,使得损失函数,或者说预测结果和实际结果的误差减小。BP算法其实是一个双向算法,包含两个步骤: 1.正向传递输入信息,得到 Loss 值。 2.反向传播误差,从而由优化算法来调整网络权值。 4.求解损失函数对某个权值的梯度 图片 其中$\mathrm{s_c=U^T\sigma(Wx_c+b),s=U^T\sigma(Wx+b)}$。一般可以把$\Delta$固定下来,比如设为1或者10。 对于上面的图, 假设图中指示出的网络中的某个权值 w$_\mathrm{jk}^\mathrm{l}$ 发生了一个小的改变 $\Delta w_\mathrm{jk}^\mathrm{l}$ , 假设网络最终损失函数的输出为$\mathbb{C}$,则 C 应该是关于 $\mathrm{w}_\mathrm{jk}^{\mathrm{l}}$ 的一个复合函数。 所谓复合函数,就是把 $\mathbb{C}$ 看成因变量,则$\mathrm{w}_\mathrm{jk}^{\mathrm{l}}$ 可以看成导致 C 改变的自变量, 比如假设有一个复 合函数 $\mathrm{y=f(g(x))}$,则 y 就好比这里的$\mathbb{C}$ , x 就好比$\mathrm{w}_{\mathrm{jk}}^{\mathrm{l}}$, w$_{jk}^{\mathrm{l}}$ 每经过一层网络可以看成是经过某个函数的处理。而下面求写的时候都用偏导数, 是因为虽然我们这里只关注了一个 w$_\mathrm{jk}^{\mathrm{l}}$,但是实际上网络中的每一个 w 都可以看成一个 x。 显然,这个$\Delta w_\mathrm{jk}^\mathrm{l}$的变化会引起下一层直接与其相连的一个神经元,以及下一层之后所有神经元直到 最终输出 C 的变化, 如图中蓝线标记的就是该权值变化的影响传播路径。 把 C 的改变记为 $\Delta\mathbb{C}$, 则根据高等数学中导数的知识可以得到: 则神经元 a$_\mathrm{j}^1$ 下面一层第 q 个与其相连的神经元 a$_{\mathrm{q}}^{1+1}$ 的变化为: $$ \Delta\mathrm{a_q^{1+1}}\approx\frac{\partial\mathrm{a_q^{1+1}}}{\partial\mathrm{a_j^1}}\Delta\mathrm{a_j^1} $$将 $(2)$ 代入 (3) 可以得到: $$ \Delta\mathrm{a_{q}^{l+1}}\:\approx\:\frac{\partial\mathrm{a_{q}^{l+1}}}{\partial\mathrm{a_{j}^{l}}}\:\frac{\partial\mathrm{a_{j}^{l}}}{\partial\mathrm{w_{jk}^{l}}}\:\Delta\mathrm{w_{jk}^{l}} $$假设从 $\mathrm{a_j}^1$ 到 C的一条路径为$\mathrm{a_j}^1,\mathrm{a_q}^{1+1},...,\mathrm{a_n}^{\mathrm{L-1}},\mathrm{a_m}^{\mathrm{L}}$,则在该条路径上 C 的变化量 $\Delta C$ 为: $$\Delta\mathrm{C}\approx\frac{\partial\mathrm{C}}{\partial\mathrm{a}_\mathrm{m}^\mathrm{L}}\frac{\partial\mathrm{a}_\mathrm{m}^\mathrm{L}}{\partial\mathrm{a}_\mathrm{n}^\mathrm{L-1}}\frac{\partial\mathrm{a}_\mathrm{n}^\mathrm{L-1}}{\partial\mathrm{a}_\mathrm{p}^\mathrm{L-2}}[USD3P]\frac{\partial\mathrm{a}_\mathrm{q}^\mathrm{l+1}}{\partial\mathrm{a}_\mathrm{j}^\mathrm{l}}\frac{\partial\mathrm{a}_\mathrm{j}^\mathrm{l}}{\partial\mathrm{w}_\mathrm{jk}^\mathrm{l}}\Delta\mathrm{w}_\mathrm{jk}^\mathrm{l}$$ 至此,我们已经得到了一条路径上的变化量, 其实本质就是链式求导法则,或者说是复合函数求导法则。那么整个的变化量就县把所有可能链路上的变化量加起来: $$\Delta\mathrm{C}\approx\sum_{\mathrm{minp[USD3P]q}}\frac{\partial\mathrm{C}}{\partial\mathrm{a_{m}^{L}}}\frac{\partial\mathrm{a_{m}^{L}}}{\partial\mathrm{a_{n}^{L-1}}}\frac{\partial\mathrm{a_{n}^{L-1}}}{\partial\mathrm{a_{p}^{L-2}}}[USD3P]\frac{\partial\mathrm{a_{q}^{l+1}}}{\partial\mathrm{a_{j}^{l}}}\frac{\partial\mathrm{a_{j}^{l}}}{\partial\mathrm{w_{jk}^{l}}}\Delta\mathrm{w_{jk}^{l}}$$ $$\begin{aligned}\text{则 C 对某个权值 w}_{\mathrm{jk}}^{\dagger}&\text{的梯度为:}\\&\frac{\partial\mathrm{C}}{\partial\mathrm{w}_{\mathrm{jk}}^{\dagger}}\approx\sum_{\mathrm{nmp},<0}\frac{\partial\mathrm{C}}{\partial\mathrm{a}_{\mathrm{m}}^{\mathrm{L}}}\frac{\partial\mathrm{a}_{\mathrm{m}}^{\mathrm{L}}}{\partial\mathrm{a}_{\mathrm{n}}^{\mathrm{L}-1}}\frac{\partial\mathrm{a}_{\mathrm{n}}^{\mathrm{L}-1}}{\partial\mathrm{a}_{\mathrm{p}}^{\mathrm{L}-2}}[USD3P]\frac{\partial\mathrm{a}_{\mathrm{q}}^{\mathrm{l}+1}}{\partial\mathrm{a}_{\mathrm{j}}^{\mathrm{l}}}\frac{\partial\mathrm{a}_{\mathrm{j}}^{\mathrm{l}}}{\partial\mathrm{w}_{\mathrm{jk}}^{\mathrm{l}}}\end{aligned}$$ 到这里从数学分析的角度来说,我们可以知道这个梯度是可以计算和求解的。 总结: 1.每两个神经元之间是由一条边连接的,这个边就是一个权重值,它是后一个神经元 z 部分,也就是未经激活函数非线性变换之前的结果对前一个神经元的 a 部分,也就是经激活函数非线性变换之后的结果的偏导数。 2.一条链路上所有偏导数的乘积就是这条路径的变化量。 3.所有路径变化量之和就是整个损失函数的变化量。 5.反向传播算法Backpropgation 5.1 明确一些定义 图片 对于上面的神经网络, 首先明确下面一些定义: 图片 5.2 计算一个梯度 假设损失函数为:J=(1+sc −s) 来计第一下 $\frac{\partial\mathrm{J}}{\partial\mathrm{W}_{14}^{(1)}}$,由于 s 是网络的输出, $\frac{\partial\mathrm{J}}{\partial\mathrm{s}}=-1$, 所以只需要计算$\frac{\partial\mathrm{s}}{\partial\mathrm{W}_{14}^{(1)}}$ 即可。 而由于 s 激活函数就是1, 所以有: $$ \mathrm{s=a_1^{(3)}=z_1^{(3)}=W_{11}^{(2)}a_1^{(2)}+W_{12}^{(2)}a_2^{(2)}} $$$$ \frac{\partial\mathrm{s}}{\partial\mathrm{W}_{14}^{(1)}}=\frac{\partial(\mathrm{W}_{11}^{(2)}\mathrm{a}_{1}^{(2)}+\mathrm{W}_{12}^{(2)}\mathrm{a}_{2}^{(2)})}{\partial\mathrm{W}_{14}^{(1)}} $$图片 所以: $$\frac{\partial s}{\partial\mathrm{W}_{14}^{(1)}}=\frac{\partial\mathrm{W}_{11}^{(2)}\mathrm{a}_{1}^{(2)}}{\partial\mathrm{W}_{14}^{(1)}}=\mathrm{W}_{11}^{(2)}\frac{\partial\mathrm{a}_{1}^{(2)}}{\partial\mathrm{W}_{14}^{(1)}}$$ 由于图片代入公式(9)可以得到 $$\begin{gathered} \frac{\partial\mathrm{s}}{\partial\mathrm{W}_{14}^{(1)}}=\mathrm{W}_{11}^{(2)}\frac{\partial\mathrm{a}_{1}^{(2)}}{\partial\mathrm{W}_{14}^{(1)}}=\mathrm{W}_{11}^{(2)}\frac{\partial\mathrm{a}_{1}^{(2)}}{\partial\mathrm{z}_{1}^{(2)}}\frac{\partial\mathrm{z}_{1}^{(2)}}{\partial\mathrm{W}_{14}^{(1)}1} \ =\operatorname{W}_{11}^{(2)}\mathfrak{\sigma}^{\prime}(\mathfrak{z}_{1}^{(2)})\frac{\partial(\mathfrak{b}_{1}^{(1)}+\sum_{\mathrm{k}}\mathfrak{a}_{\mathrm{k}}^{(1)}\mathfrak{W}_{1\text{k}} ^ { ( 1 ) })}{\partial\mathrm{W}_{14}^{(1)}} \end{gathered}$$ $$ \text{公式}(10)中\frac{\partial(\mathrm{h}_{1}^{(1)}+\sum_{k}a_{k}^{(1)}W_{1k}^{(1)})}{\partial\mathrm{W}_{14}^{(1)}}=\mathrm{a}_{4}^{(1)}。 $$此外还有一个更重要的变换, 同样的方法可以求出: $$ \frac{\partial\mathrm{J}}{\partial\mathrm{z}_1^{(2)}}=\mathrm{W}_{11}^{(2)}\mathrm{\sigma}^{\prime}(\mathrm{z}_1^{(2)}) $$$$ \frac{\partial\mathrm{s}}{\partial\mathrm{W}_{14}^{(1)}}=\frac{\partial\mathrm{J}}{\partial\mathrm{z}_1^{(2)}}\mathrm{a}_4^{(1)}=\delta_1^{(2)}\mathrm{a}_4^{(1)} $$并且结合前面对 $\delta_\mathrm{j}^{(\mathrm{k})}$ 的定义,公式 (10) 可以写成: 所以损失函数对任离一个网络权伯的梯度可以弓成两个值相乘的形式。对于$\mathrm{a}_4^{(1)}$,它是网络前向传递过程中的一个神经元的输出, 我们当然可以在网络前向传递的时候将它保存下来。而对于 $\delta_1^{(2)}$,它是反向传播过来的梯度,也就是 J 对 z 的梯度, 下面来者如何通过后面神经元的 $\delta_{\mathrm{i}}^{(\mathrm{k})}$ 反向传播得到 前一个神经元处的 $\delta_\mathrm{j}^{(k-1)}$ 。 5.3 反向传播误差 到这里需要注意,反向传播仅指用于计算梯度的方法,它并不是用于神经网络的整个学习算法。通过反向传播算法算法得到梯度之后,可以使用比如随机梯度下降算法等来进行学习。 反向传播算法传播的是误差,传播方向是从最后一层依次往前,这是一个迭代的过程。在上面的过程中,我们求得了损失函数对于某个权值的梯度,通过该处的梯度值,可以将其向前传播,得到前一个结点的梯度。 图片 $(k-1)$ 例如对于上面的图, 假设已经求出 z$^{(\mathrm{k})}$ 处的柠伊卡$^{(\mathrm{k})}$,则行误差仅照某杀连接路径, 传递到 $\mathrm{a_j}^{[\mathrm{l}]}$ per 处,则该处的梯度为$\delta_{\mathrm{i}}^{(\mathrm{k})}W_{\mathrm{ij}}^{(\mathrm{k}-1)}$。实际上这只是一条路径, $\mathrm{a_j}^{(\mathrm{k-1})}$处可能会收到很多个不同的误差, 例如下面该神经元后面有两条权值 边的情况: 图片 这个时候只要把它们相加就好了,所以 a$_{\mathrm{j}}^{(\mathrm{k}-1)}$处,则该处的梯度为$\sum_{\mathrm{i}}\delta_{\mathrm{i}}^{(\mathrm{k})}\mathrm{W}_{\mathrm{ij}}^{(\mathrm{k}-1)}$。 图片 6.优化示例 再次说一下,反向传播仅指用于计算梯度的方法,它并不是用于神经网络的整个学习算法。通过反向传播算法算法得到梯度之后,还需要使用比如随机梯度下降算法等来进行学习。 在上面的过程中, 我们通过反向传播弹法求解出了任意一个$z_j^{(\mathrm{i})}$处的梯度$\delta_j^{(\mathrm{i})}$,为什么是$z_j^{(\mathrm{i})}$而不是$a_j^{(\mathrm{i})}$,因为$z_j^{(\mathrm{i})}$前面就是连接它的w,以随机梯度下降算法为例,w的优化方法为: $$\mathrm{w_{ijnew}^{(1)}=w_{ijold}^{(1)}-\eta\cdot\frac{\partial J}{\partial w_{ij}^{(1)}}=w_{ijold}^{(1)}-\eta\cdot\delta_{i}^{(1+1)}\cdot a_{j}^{(1)}}$$
机器学习
# DL/ML
刘航宇
3年前
0
621
2
2023-07-21
嵌入式软件-无需排序找数字
题目 示例 解答code1 code2 题目 有1000个整数,每个数字都在1~200之间,数字随机排布。假设不允许你使用任何排序方法将这些整数有序化,你能快速找到从0开始的第450小的数字吗?(从小到大第450位) 示例 输入 - [184, 87, 178, 116, 194, 136, 187, 93, 50, 22, 163, 28, 91, 60, 164, 127, 141, 27, 173, 137, 12, 169, 168, 30, 183, 131, 63, 124, 68, 136, 130, 3, 23, 59, 70, 168, 194, 57, 12, 43, 30, 174, 22, 120, 185, 138, 199, 125, 116, 171, 14, 127, 92, 181, 157, 74, 63, 171, 197, 82, 106, 126, 85, 128, 137, 106, 47, 130, 114, 58, 125, 96, 183, 146, 15, 168, 35, 165, 44, 151, 88, 9, 77, 179, 189, 185, 4, 52, 155, 200, 133, 61, 77, 169, 140, 13, 27, 187, 95, 140, 196, 171, 35, 179, 68, 2, 98, 103, 118, 93, 53, 157, 102, 81, 87, 42, 66, 90, 45, 20, 41, 130, 32, 118, 98, 172, 82, 76, 110, 128, 168, 57, 98, 154, 187, 166, 107, 84, 20, 25, 129, 72, 133, 30, 104, 20, 71, 169, 109, 116, 141, 150, 197, 124, 19, 46, 47, 52, 122, 156, 180, 89, 165, 29, 42, 151, 194, 101, 35, 165, 125, 115, 188, 57, 144, 92, 28, 166, 60, 137, 33, 152, 38, 29, 76, 8, 75, 122, 59, 196, 30, 38, 36, 194, 19, 29, 144, 12, 129, 130, 177, 5, 44, 164, 14, 139, 7, 41, 105, 19, 129, 89, 170, 118, 118, 197, 125, 144, 71, 184, 91, 100, 173, 126, 45, 191, 106, 140, 155, 187, 70, 83, 143, 65, 198, 108, 156, 5, 149, 12, 23, 29, 100, 144, 147, 169, 141, 23, 112, 11, 6, 2, 62, 131, 79, 106, 121, 137, 45, 27, 123, 66, 109, 17, 83, 59, 125, 38, 63, 25, 1, 37, 53, 100, 180, 151, 69, 72, 174, 132, 82, 131, 134, 95, 61, 164, 200, 182, 100, 197, 160, 174, 14, 69, 191, 96, 127, 67, 85, 141, 91, 85, 177, 143, 137, 108, 46, 157, 180, 19, 88, 13, 149, 173, 60, 10, 137, 11, 143, 188, 7, 102, 114, 173, 122, 56, 20, 200, 122, 105, 140, 12, 141, 68, 106, 29, 128, 151, 185, 59, 121, 25, 23, 70, 197, 82, 31, 85, 93, 173, 73, 51, 26, 186, 23, 100, 41, 43, 99, 114, 99, 191, 125, 191, 10, 182, 20, 137, 133, 156, 195, 5, 180, 170, 74, 177, 51, 56, 61, 143, 180, 85, 194, 6, 22, 168, 105, 14, 162, 155, 127, 60, 145, 3, 3, 107, 185, 22, 43, 69, 129, 190, 73, 109, 159, 99, 37, 9, 154, 49, 104, 134, 134, 49, 91, 155, 168, 147, 169, 130, 101, 47, 189, 198, 50, 191, 104, 34, 164, 98, 54, 93, 87, 126, 153, 197, 176, 189, 158, 130, 37, 61, 15, 122, 61, 105, 29, 28, 51, 149, 157, 103, 195, 98, 100, 44, 40, 3, 29, 4, 101, 82, 48, 139, 160, 152, 136, 135, 140, 93, 16, 128, 105, 30, 50, 165, 86, 30, 144, 136, 178, 101, 39, 172, 150, 90, 168, 189, 93, 196, 144, 145, 30, 191, 83, 141, 142, 170, 27, 33, 62, 43, 161, 118, 24, 162, 82, 110, 191, 26, 197, 168, 78, 35, 91, 27, 125, 58, 15, 169, 6, 159, 113, 187, 101, 147, 127, 195, 117, 153, 179, 130, 147, 91, 48, 171, 52, 81, 32, 194, 58, 28, 113, 87, 15, 156, 113, 91, 13, 80, 11, 170, 190, 75, 156, 42, 21, 34, 188, 89, 139, 167, 171, 85, 57, 18, 7, 61, 50, 38, 6, 60, 18, 119, 146, 184, 74, 59, 74, 38, 90, 84, 8, 79, 158, 115, 72, 130, 101, 60, 19, 39, 26, 189, 75, 34, 158, 82, 94, 159, 71, 100, 18, 40, 170, 164, 23, 195, 174, 48, 32, 63, 83, 191, 93, 192, 58, 116, 122, 158, 175, 92, 148, 152, 32, 22, 138, 141, 55, 31, 99, 126, 82, 117, 117, 3, 32, 140, 197, 5, 139, 181, 19, 22, 171, 63, 13, 180, 178, 86, 137, 105, 177, 84, 8, 160, 58, 145, 100, 112, 128, 151, 37, 161, 19, 106, 164, 50, 45, 112, 6, 135, 92, 176, 156, 15, 190, 169, 194, 119, 6, 83, 23, 183, 118, 31, 94, 175, 127, 194, 87, 54, 144, 75, 15, 114, 180, 178, 163, 176, 89, 120, 111, 133, 95, 18, 147, 36, 138, 92, 154, 144, 174, 129, 126, 92, 111, 19, 18, 37, 164, 56, 91, 59, 131, 105, 172, 62, 34, 86, 190, 74, 5, 52, 6, 51, 69, 104, 86, 7, 196, 40, 150, 121, 168, 27, 164, 78, 197, 182, 66, 161, 37, 156, 171, 119, 12, 143, 133, 197, 180, 122, 71, 185, 173, 28, 35, 41, 84, 73, 199, 31, 64, 148, 151, 31, 174, 115, 60, 123, 48, 125, 83, 36, 33, 5, 155, 44, 99, 87, 41, 79, 160, 63, 63, 84, 42, 49, 124, 125, 73, 123, 155, 136, 22, 58, 166, 148, 172, 177, 70, 19, 102, 104, 54, 134, 108, 160, 129, 7, 198, 121, 85, 109, 135, 99, 192, 177, 99, 116, 53, 172, 190, 160, 107, 11, 17, 25, 110, 140, 1, 179, 110, 54, 82, 115, 139, 190, 27, 68, 148, 24, 188, 32, 133, 123, 82, 76, 51, 180, 191, 55, 151, 132, 14, 58, 95, 182, 82, 4, 121, 34, 183, 182, 88, 16, 97, 26, 5, 123, 93, 152, 98, 33, 135, 182, 107, 16, 58, 109, 196, 200, 163, 98, 84, 177, 155, 178, 110, 188, 133, 183, 22, 67, 164, 61, 83, 12, 86, 87, 86, 131, 191, 184, 115, 77, 117, 21, 93, 126, 129, 40, 126, 91, 137, 161, 19, 44, 138, 129, 183, 22, 111, 156, 89, 26, 16, 171, 38, 54, 9, 123, 184, 151, 58, 98, 28, 127, 70, 72, 52, 150, 111, 129, 40, 199, 89, 11, 194, 178, 91, 177, 200, 153, 132, 88, 178, 100, 58, 167, 153, 18, 42, 136, 169, 99, 185, 196, 177, 6, 67, 29, 155, 129, 109, 194, 79, 198, 156, 73, 175, 46, 1, 126, 198, 84, 13, 128, 183, 22] 输出 - 94 解答 解法一:1、不能排序 2、找从0开始的第450位小的数,注意的“从0开始”这句话。[0-450]这个区间总共有451个数,因此我们需要找的是第451位小的数 开始做题---------------------------------------------------------- 可以利用hash表的特性,使用一个201大小的数组,数组的下标为数据的值,数组的值为数据出现的次数。 可以这么理解 key->代表数据,同时也是数组下标 value->代表数据出现的次数 首先给数组元素初始化为0,也就是每个数据出现的次数都是0。 接着使用循环将每个数据出现的次数添加到数组中 再利用循环将出现的次数累加,如果次数累加到450,就说明找到了第450大的数 code1 /* 1、定义一个大小为201的整型数组arr,用来存储每个数在数组numbers中出现的次数。使用memset函数将所有元素初始化为0。 2、定义一个整型变量i,用来作为循环的计数器。初始化为0。 3、使用while循环遍历数组numbers,对于每个数,将其作为arr的下标,将arr对应的元素加一,表示该数出现了一次。同时将i加一,表示下一个数。 4、重新将i赋值为1,表示从第一个数开始计算出现次数之和。 5、定义一个整型变量sum,用来累计前面的数出现的次数之和。初始化为0。 6、使用while循环遍历arr,从下标1开始,对于每个元素,将其加到sum上,然后判断sum是否大于或等于451。如果是,则跳出循环,表示找到了满足条件的数。如果不是,则继续遍历。 7、返回i,表示找到的数。 */ int find(int* numbers, int numbersLen ) { // write code here int arr[201], i=0, sum=0; //定义一个大小为201的整型数组arr,用来存储每个数在数组numbers中出现的次数。定义一个整型变量i,用来作为循环的计数器。定义一个整型变量sum,用来累计前面的数出现的次数之和。 //初始化数组元素 memset(arr,0,sizeof(arr)); //使用memset函数将所有元素初始化为0。 //循环添加每个数据出现的次数 while(i < numbersLen){ //使用while循环遍历数组numbers arr[numbers[i]]++; //对于每个数,将其作为arr的下标,将arr对应的元素加一,表示该数出现了一次。 i++; //同时将i加一,表示下一个数。 } //循环计算次数,当次数超过451次,那就是找到了 i=1; //重新将i赋值为1,表示从第一个数开始计算出现次数之和。 while((sum=sum+arr[i]) < 451){ //使用while循环遍历arr,从下标1开始 i++; //对于每个元素,将其加到sum上,并将i加一。 } return i; //返回i,表示找到的数。 } code2 解法二:因为知道每个数字的大小:1~200,所以无论序列有多少个数字,可以根据一个200行的表,然后统计所有数字出现的频率。 这个思路在硬件设计上常见,即用数字的值代表查表的地址。 /* 1、定义一个大小为201的整型数组table,用来存储每个数在数组numbers中出现的次数。初始化为0。 2、遍历数组numbers,对于每个数,将其作为table的下标,将table对应的元素加一,表示该数出现了一次。 3、定义一个整型变量acc,用来累计前面的数出现的次数之和。初始化为0。 4、遍历table,从下标1开始,对于每个元素,将其加到acc上,然后判断acc是否大于或等于451。如果是,则返回当前的下标,表示找到了满足条件的数。如果不是,则继续遍历。 5、如果遍历完table都没有找到满足条件的数,则返回0。 */ /** * 代码中的类名、方法名、参数名已经指定,请勿修改,直接返回方法规定的值即可 * * * @param numbers int整型一维数组 * @param numbersLen int numbers数组长度 * @return int整型 */ int find(int* numbers, int numbersLen ) { // write code here int table[201] = {0}; //定义一个大小为201的整型数组table,用来存储每个数在数组numbers中出现的次数。初始化为0。 for (int i = 0; i < numbersLen; i++) { table[numbers[i]]++; //遍历数组numbers,对于每个数,将其作为table的下标,将table对应的元素加一,表示该数出现了一次。 } int acc = 0; //定义一个整型变量acc,用来累计前面的数出现的次数之和。初始化为0。 for (int i = 1; i < 201; i++) { acc += table[i]; //遍历table,从下标1开始,对于每个元素,将其加到acc上。 if (acc >= 451) return i; //判断acc是否大于或等于451。如果是,则返回当前的下标,表示找到了满足条件的数。 } return 0; //如果遍历完table都没有找到满足条件的数,则返回0。 }
嵌入式&系统
编程&脚本笔记
# 嵌入式
# C/C++
刘航宇
3年前
0
356
0
2023-07-19
嵌入式软件-基于C语言小端转大端
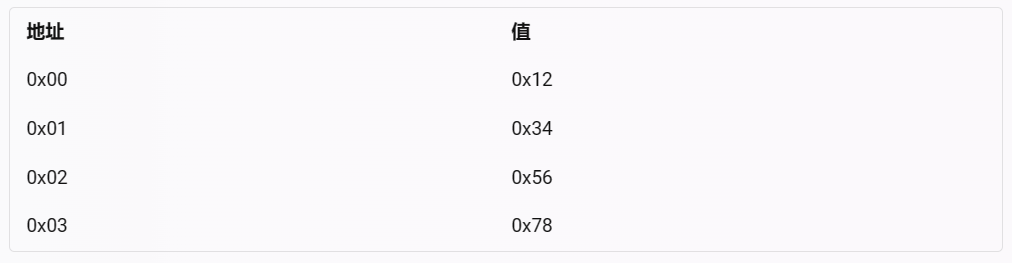
意义 题目 示例 解答1.char指针,按字节替换 2.利用union联合体共用内存空间特性,使用char数组来改变 3. 使用按位与运算保留以获取每个字节,然后按位左移到正确位置并拼接 4. 使用预定义好的宏函数 意义 大端小端转化对嵌入式系统有意义,因为不同的处理器或者通信协议可能采用不同的字节序来存储或者传输数据。字节序是指一个多字节数据在内存中的存放顺序,它有两种主要的形式: 大端:最高有效位(MSB)存放在最低的内存地址,最低有效位(LSB)存放在最高的内存地址。 小端:最低有效位(LSB)存放在最低的内存地址,最高有效位(MSB)存放在最高的内存地址。 例如,一个32位的整数0x12345678,在大端系统中,它的内存布局是: pC703EF.png图片 而在小端系统中,它的内存布局是: pC70G4J.png图片 如果一个嵌入式系统需要和不同字节序的设备或者网络进行交互,就需要进行字节序的转换,否则会导致数据错误或者通信失败。例如,TCP/IP协议族中的所有层都采用大端字节序来表示数据包头中的16位或32位的值,如IP地址、包长、校验和等。如果一个嵌入式系统使用小端字节序的处理器,并且想要建立一个TCP连接,就需要将IP地址等信息从小端转换为大端再发送出去,否则对方无法正确解析。 题目 输入一个数字n,假设它是以小端模式保存在机器的,请将其转换为大端方式保存时的值。 示例 输入:1 返回值:16777216 解答 1.char指针,按字节替换 /* * @param n int整型 * @return int整型 */ int convert(int n ) { // write code here int tmp = 0x00000000; //开辟新的int空间用于接收转化结果 unsigned char *p = &tmp, *q = &n; p[0] = q[3]; p[1] = q[2]; p[2] = q[1]; p[3] = q[0]; return tmp; }2.利用union联合体共用内存空间特性,使用char数组来改变 /** * 代码中的类名、方法名、参数名已经指定,请勿修改,直接返回方法规定的值即可 * * * @param n int整型 * @return int整型 */ typedef union { int i; unsigned char c[4] } inc_u; int convert(int n ) { // write code here inc_u x; //这里也可以用新开辟空间进行置换 x.i = n; //利用按位异或运算可叠加、可还原性 x.c[0] ^= x.c[3], x.c[3] ^= x.c[0], x.c[0] ^= x.c[3]; //首尾两字节对调 x.c[1] ^= x.c[2], x.c[2] ^= x.c[1], x.c[1] ^= x.c[2]; //中间两字节对调 return x.i; /* 按位<<到正确位置,并用|拼装 return (x.c[0]<<24)|(x.c[1]<<16)|(x.c[2]<<8)|x.c[3]; */ }3. 使用按位与运算保留以获取每个字节,然后按位左移到正确位置并拼接 /** * 代码中的类名、方法名、参数名已经指定,请勿修改,直接返回方法规定的值即可 * * * @param n int整型 * @return int整型 */ int convert(int n ) { // write code here return (((n & 0xff000000)>>24) | ((n & 0x00ff0000)>>8 ) | ((n & 0x0000ff00)<<8 ) | ((n & 0x000000ff)<<24); //按位与时,遇0清零,遇1保留 ); }4. 使用预定义好的宏函数 本条方法参考 https://www.codeproject.com/Articles/4804/Basic-concepts-on-Endianness 文中提到网络上常用的套接字接口(socket API)指定了一种称为网络字节顺序的标准字节顺序,这个顺序其实就是大端模式;而当时,同时代的 x86 系列主机反而是小端模式。所以就促使产生了如: ntohs() convert Network order TO Host order in Short (16 bit 大转小); ntohl() convert Network order TO Host order in Long (32 bit 大转小); htons() convert Host order TO Network order in Short (16 bit 小转大); htonl() convert Host order TO Network order in Long (32 bit 小转大). 所以我们这里使用 32 bit 小转大的 htonl() 宏函数来解决这个问题。 /** * 代码中的类名、方法名、参数名已经指定,请勿修改,直接返回方法规定的值即可 * * * @param n int整型 * @return int整型 */ int convert(int n ) { // write code here return htonl(n); ); }
嵌入式&系统
编程&脚本笔记
# 嵌入式
# C/C++
刘航宇
3年前
0
562
1
2023-07-13
反向散射理论与ADG902电路实现
后向散射通信技术,是在天线对信号散射的基础上,采用标签后向散射的方式,通过改变发射端标签的反射系数来实现后向散射通信。无线电波在传输过程中,当通过不同介质时,因为介质阻抗的差异性,会产生反射作用,根据介质材料和阻抗的不同,会产生不同的反射量。因此通过调节天线端口的阻抗匹配度,入射的无线电波就可以产生不同反射量,导致入射信号和反射信号的差异性,也就是反射系数 Γ 。具体表示如下: $$\Gamma=\frac{Z_L-Z_0}{Z_L+Z_0}$$ 式中 Z0表示天线端的特征阻抗,一般是 50 Ω,ZL表示标签端口的输入阻抗,Γ表示入射信号振幅和反射信号振幅的复数比。当Γ=0 时,阻抗匹配,入射信号全部传递,无反射信号的产生;Γ = 1时,标签端的输入阻抗为开路,阻抗失配,入射信号被全部反射,产生幅值相同相位相同的反射信号;Γ = −1时,标签端的输入阻抗为短路状态,阻抗失配,入射信号被全部反射,产生幅值相同相位相反的反射信号。因此,通过改变标签的输入阻抗,产生不同的反射系数,就可以控制无线电波的入射和反射,实现有效信号的传递,这也就是后向散射通信的基本原理。为了实现上述后向散射通信,还需要加载天线端口的控制,结构如下图。通过射频开关来控制两个不同的负载阻抗与天线端口的连接,实现阻抗的匹配和失调,完成信号的入射和反射。当开关在负载 Z1和 Z2间转化时,由于负载阻抗的不同,载波信号在天线端的反射比例也不同,因此就产生了不同的调制载波。在实际通信中,为了达到最优传输质量,通常要使反射信号的差异最大,对应完全反射和完全吸收两种形式。对调制后的反射信号进行解调处理后,就可以得到所传递的基带信号,完成后向散射的通信。采用负载 50 Ω 的完全吸收和负载短路的完全反射两种信号传输差异,来实现后向散射的信息传输。 图片 使用后向散射开关 ADG 902 来实现基带信号对天线状态的控制,ADG 902 电路结构如图 4.12 所示。将数字基带信号的接入 ADG 902 的 CTRL 端,通过数字基带信号的“0”、“1”来控制 ADG 902 的关断和闭合,RF2 端连接射频天线。通过 ADG 902 中开关的关断,来控制天线对外界调制载波的反射和吸收。 注意:RF1接天线,RF2接地也可以,这里读者可自行证明 图片 当逻辑电平 CTRL=0时,S1关断,S2闭合,此时天线接收端口接地,由式可得,Z=0,T=1,载波信号被完全反射;当逻辑电平 CTRL=1 时,S1 闭合,S2 关断,此时天线接收端匹配,载波被完全吸收。
通信&信息处理
# 通信&射频
# 物联网
刘航宇
3年前
1
1,494
1
1
2
...
13
下一页