首页
📁归档
⏳时光机
📫留言
🚩友链
💰资助名单
推荐
🎧音乐
🏜️ 壁纸
❤ 捐助
Search
1
【NPN/PNP三极管】放大电路饱和失真和截止失真的区别
19,945 阅读
2
论文写作中如何把word里面所有数字和字母替换为新罗马字体
10,529 阅读
3
【高数】形心计算公式讲解大全
8,984 阅读
4
【概论】一阶矩、二阶矩原点矩,中心矩区别与概念
7,743 阅读
5
Vivado-FPGA Verilog烧写固化教程
7,641 阅读
🪶微语&随笔
励志美文
我的随笔
写作办公
📡电子&通信
嵌入式&系统
通信&信息处理
编程&脚本笔记
⌨️IC&系统
FPGA&ASIC
VLSI&IC验证
EDA&虚拟机
💻电子&计算机
IP&SOC设计
机器学习
软硬件算法
登录
三个(共39篇)
找到
39
篇与
三个
相关的结果
- 第 2 页
2023-03-03
天线设计1-基本参数
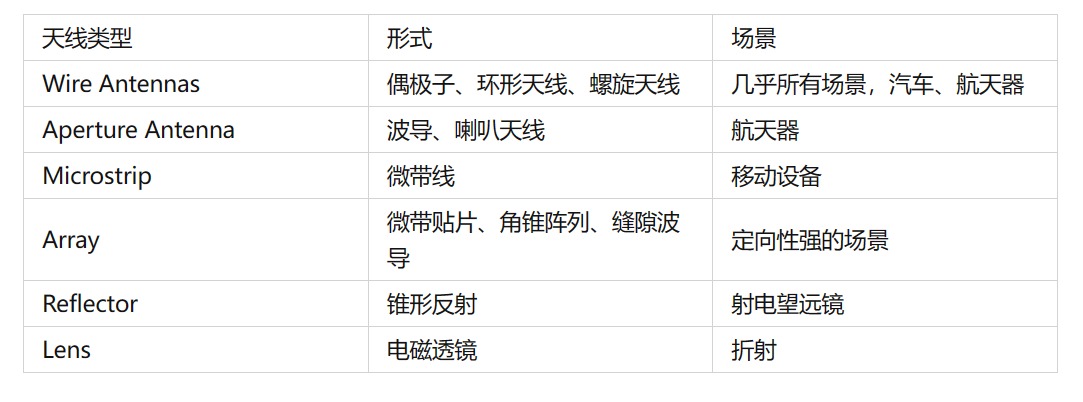
第一章 导言 天线类型 图片 辐射机理 电磁波是如何产生,并最终与天线“分离”而在自由空间中传播的呢? 我们讨论以下几种辐射源的辐射原理。 单根导线 图片 图片 这一方程表示了电流和电荷之间的关系,也是电磁辐射的基本条件:要产生电磁辐射,需要有电流或电荷的加速(或减速)。 要产生电荷的加速或减速,需要导线弯曲、不连续、或者端接。就如同水流一样,当管道宽度变化,流速发生变化,在管道宽度变化的区域,就有水流的加速/减速。 为了定性的的了解辐射机理。考虑一个脉冲源连接到一个导线,导线与GND存在RC寄生参数,到导线通电时,导体中的电子被加速;在终端的电子被减速,即反射;从而在导线的两端和导线上产生辐射场。在这个过程中,电荷加速是外部源造成的,电场使电荷运动;电荷减速,则于是由于感应场有关的力造成的,例如导线两端的电荷积累。因此激励电场引起电荷加速,而导线阻抗不连续导致辐射的产生。 传输线 图片 考虑一个电压源连接到图1.11(a)所示的两根导线上。导线间的交变电压使得电荷加速或减速,交变电场感应出交变的磁场,反之亦然,因此,从天线端产生了电磁波,并传播到自由空间中。 结论:激发电场需要电荷,单维持电场不需要。(这就类似水波的产生) 偶极子 首先我们要接受电磁场传播的速度是有限的。两个偶极子在每T/2的时间内交换位置,每个T/2时间内,电场只能传播的距离。每次偶极子交换位置时,电场的极性发生了变化,因此传播的电场变成交变电场,产生交变磁场,从而形成了脱离源的电磁波。 图片 电流在细导线上的分布 讨论天线的辐射场时,需要知道电流的分布。 图片 图片 图片 图片 分析方法 在过去,分析复杂天线问题通常用积分方程方法、几何衍射理论来求解。此类方法用于线型天线较为方便。然而当辐射系统为多个波长时,低频的方法计算效率不高,最近广为关注和应用的GTD/UTD方法,它是几何光学的拓展,通过引入衍射机制,克服了几何光学的局限性。有限差分时域是另一种在散射方面受到广泛关注的方法,现已应用到天线辐射问题。有限元是一种在解决天线问题中获得巨大成功的方法。 遇到的挑战 目前仍有许多挑战和需要解决的问题,例如单片集成MIC技术和相控阵架构依然是最具挑战的问题。复杂问题的计算电磁学。创新的天线设计。多功能、多频带、超宽带、可重构天线等。 第二章 天线的基本参数和FOM 在描述天线性能前,需要定义一些参数,一些参数可能是相互关联的。书中的许多带引号的定义来源于 IEEE Standard Definitions of Terms for Antennas [IEEE Std 145-1993.Reaffirmed 2004(R2004)] Radiation Pattern 辐射图 在天线研究中,通常用球面坐标来表示电磁场会较为方便,因此首先介绍球面坐标系 图片 图片 图片 辐射波瓣(radiation lobe):以辐射强度较弱的区域为边界,将辐射图分割成几个区域。 最大的辐射波瓣称为主瓣(major lobe),其他则为次瓣(minor lobe)。副瓣(side lobe)通常表示功率水平最高的次瓣。后瓣(back lobe)方向与主瓣方向相反的次瓣。 图片 图片 图片 各向同性、定向、全向天线 图片 其中全向天线是定向天线的特殊类型。 主平面 对于线性极化的天线,通常用其主要平面图来描述其性能,包括: 电场平面(E-plane):包含最大电场矢量与最大辐射方向的平面。 磁场平面(H-plane):包含最大磁场矢量与最大辐射方向的平面。 大多数天线的通常的做法是让至少一个电磁平面与几何平面重合。例如图2.5中,可以定义XOZ平面为电场的主平面,而XOY为磁场的主平面。 图片 图片 Field Regions 场区 天线周围空间可分成三个区域: 图片 图2.8显示了,从近场到远场时,场的形状随距离的典型变化趋势。在近场中,场更加分散,几乎均匀,只有很小的变化,随着距离到辐射近场区,图案变得圆滑,逐渐形成波瓣。在远场区,形成了类似花瓣的图案。 图片 弧度和球面度 图片 图片 波束宽度 HPBW Half power beam width 半波束宽度 FNBW First Null Beam width 第一组零点之间的宽度 方向性 定义:在给定方向上的辐射强度与各项同性源的辐射强度之比。 图片 波束立体角 波束立体角定义:假如辐射强度是恒定的,且等于最大值,流过某一个立体角的功率等于天线辐射功率,那么该立体角称为波束立体角。 图片 图片 图片 传导效率和介电效率通常很难计算,可以通过实验测量,但也很难区分出二者,因此把两项合并成传导-介电效率 极化 辐射波的极化定义为:沿着传播方向观察电场的矢量箭头,随时间变化,绘制的轨迹图。 极化可以分成线性、圆形和椭圆。如果电场的矢量始终沿着一条直线变化,则该电场称为线性极化;但一般而言,电场矢量箭头的路径通常是椭圆形,这称为椭圆极化。圆形和线性实际上是椭圆的特赦情况。 假如有一个沿着负z轴方向传播的平面波。其电场可以写成: 图片 图片 输入阻抗 图片 重要公式 图片
通信&信息处理
# 天线设计
刘航宇
3年前
0
1,632
1
VLSI设计基础10-时序逻辑电路设计(二)
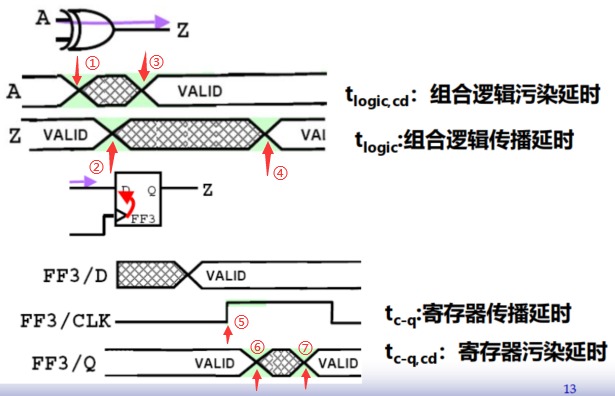
参考书:数字集成电路-电路、系统与设计,本文栏目对其重点进行精简化 目录 1. 时序基础概念 2. 时序分析的分类4. 时序约束参数(重点) 5. 各种信号路径、时序路径 6. 时钟参数两大条件(重点) 2. 时间偏差与抖动(重点)1. 时钟偏差(Clock Skew) 2. 时钟抖动(Clock Jitter) 1. 时序基础概念 时序分析的目的 对数字系统进行时序检查,判断电路是否可以正常工作(常面临建立时间和保持时间等问题),判断电路的性能等。 常常分析电压、温度、工艺(工艺角)等参数进行分析。 2. 时序分析的分类 静态时序分析(STA) 主要研究对象:建立时间、保持时间、传播延时 常用于分析同步时序电路(源时钟和目的时钟相同) 时序分析模型: 同步时钟/异步时钟 D触发器分割组合逻辑 图片 一般不需要进行太复杂的仿真,仅需要计算就可以进行分析,运行速度快。 不依赖于激励,根据穷尽信号路径上的器件就可以进行计算 常用方法是使用查找表——①输入跳变时间②输出负载(电容)→①传播延时②输出跳变(下一级的输入跳变)。 动态时序分析(DTA) 指门级仿真 主要用于异步逻辑、多周期路径 在FPGA中,将RTL代码综合利用综合工具综合成门级网络进行仿真,其中各种门级器件的逻辑是厂家提供的。 【时钟】沿 发送沿:发送数据的源时钟活动沿 捕获沿:接收数据的目的时钟的活动沿 源时钟:用于发送数据的时钟 目的时钟:用于接受数据的时钟 小贴士:在同步电路中,源时钟和目的时钟是同一个 4. 时序约束参数(重点) 即:建立时间tsu、保持时间thold、传播延时tc-q,同时我们引入污染时间tcd 建立时间: 对于捕获沿到来之前,数据需要保持稳定的时间 间接约束了组合逻辑的最大延时 保持时间: 对于捕获沿到来之后,数据需要保持稳定的时间 间接约束了组合逻辑的最小延时 传播时间(延时): 即 最大延时 时间 捕获沿50%(数据输入沿50%【注意:数据输入沿其实就是捕获沿!!!】)到数据稳定输出(输出数据50%)的时间 根据器件不同,可以分为组合逻辑传播延时tlogic和寄存器传播延时tc-q,详细见后文。 污染时间: 可以理解为 最短延时 时间——理想状态下 从输入“扰动”到输出“扰动”的时间,下文进行解释。 根据器件不同,可以分为组合逻辑污染延时tlogic,cd和寄存器污染延时tc-q,cd,详细见后文 所谓理想状态,指的是数据没有跳变时间,即数据跳变是瞬间完成的,数据跳变的90%、50%、10%是在同一个时间。 根据以上理想状态的定义,可认为一有扰动,数据就跳变完成。 计算污染时间和传播时间 图片 现对图中四个时间进行解释: 图片 图片 5. 各种信号路径、时序路径 信号的路径主要分为三个 图片 时钟路径 源时钟路径&目的时钟路径 图片 数据路径 图片 数据起点: 对于时序逻辑电路,为某时序单元的时钟引脚 对于组合逻辑电路,为某逻辑单元的数据输入端口 数据终点: 对于组合逻辑电路、时序逻辑电路都一样,均为某单元的数据输出端口 异步路径(如异步复位) 根据路径可将分析类型分为 同步分析:时钟路径+数据路径 异步分析:时钟路径+异步路径 6. 时钟参数两大条件(重点) 周期条件 图片 保持时间条件 图片 图片 2. 时间偏差与抖动(重点) 理想时钟: 从时钟沿到各个单元的时钟端口的延时相等(即路径均匀); 同一个时刻,各个单元的时钟端的时钟相位相等。 实际时钟: 时钟偏差:各个时钟端口的时钟的周期没有改变,但是相位可能略有差别。 时钟抖动:时钟的周期存在一些差别,或长或短。 1. 时钟偏差(Clock Skew) 定义与成因 指同一个时钟域之间,时钟信号到达各个寄存器的最大时间差 产生原因: 时钟源到达各个端点的路径长度不同 各个端口的负载不同 时钟网络中插入的缓存器不等 计算【全局偏差、局部偏差】 图片 全局时钟偏差 图片 局部时钟偏差 图片 时钟偏差分类(正负) 正偏差 正偏差,即时钟延迟方向与数据流方向一致,如图所示。 图片 负偏差 正偏差,即时钟延迟方向与数据流方向相反,如图所示。 图片 利用时间偏差修补建立时间 图片 【周期T】时钟偏差对于周期的影响 前文提到,负偏差使得实际逻辑计算的时间减小,为了填补裕量,只能增加时间周期,而提高时间周期会使得电路的性能下降。 图片 2. 时钟抖动(Clock Jitter) 定义与计算 定义:芯片某一给定点上,时钟周期宽度发生变化,或缩短或变宽 计算: 图片 图片 【周期T】时钟抖动对于周期的影响 因为时钟抖动是难以预料的,在确定时钟周期的时候,我们应该考虑最坏的情况,即$T-2 t_{\text {jitter }}>t_{c-q}+t_{\text {logic }}+t_{s u}$ 即上图所示的③-④。因为这意味着周期T需要增加tjitter,性能降低 总结 图片 图片
VLSI&IC验证
# VLSI
刘航宇
3年前
0
1,509
1
VLSI设计基础2-器件之MOS晶体管
参考书:数字集成电路-电路、系统与设计,本文栏目对其重点进行精简化 目录 MOS晶体管1. 数字电路的晶体管——最直观 2. MOS静态特性——稳定性(CMOS模电基础) 3. 数字电路手工分析模型——开关+Req 4. 【重点】MOS管的动态特性——性能(tp) 4. 寄生电阻(了解) 5.求tPHL例子(重点) MOS晶体管 1. 数字电路的晶体管——最直观 执行开关功能 非常小的寄生电容 非常高的集成度 相对简单的制造工艺 符号: 图片 2. MOS静态特性——稳定性(CMOS模电基础) 阈值电压 考虑体效应对于阈值电压的影响——偏执效应系数 图片 阈值电压与材料常数(氧化层厚度、费米电势、注入离子剂量等)有关 2.三个工作区: 截止—(亚阈值导电)—线性—饱和—(击穿) 沟长调制效应 图片 4. 速度饱和-重点 短沟道的饱和区范围更大,故常常工作在饱和区。 图片 图片 以下适用于NMOS,PMOS讨论需要取绝对值 图片 漏电流ID和VGS 长沟道,呈现平方关系 短沟道,不那么显著 3. 数字电路手工分析模型——开关+Req 常用开关模型——晶体管=开关+无穷大断开电阻Ron or 有限导通电阻Ron 【计算等效导通电阻Req】:2种方法 图片 例题与方法: 图片 图片 图片 图片 4. 【重点】MOS管的动态特性——性能(tp) 电容的分类 MOS管的动态响应取决于: 本征电容: 基本的MOS结构:结构电容 沟道电荷:沟道电容 漏源反向偏置的PN结耗尽电容:结电容 注意:除了结构电容外,其他两个电容是非线性、随电压变化的 寄生电容 (连线和负载引起) 略解本征电容 简单归类: 图片 小贴士:红色框框:结构电容;灰色框框:沟道电容;蓝色框框:结电容 两个覆盖(结构)电容: $\begin{gathered}C_O=C_{G C O}+C_{G D O}=2 C_o W \\ C_{G C O}=C_{G D O}=C_{o x} x_d W=C_o W\end{gathered}$ 覆盖电容是由于源漏横向扩散到栅氧下形成的寄生电容,故而有两个——栅源之间(CGSO)和栅漏之间(CGDO) 由于这个电容是由于扩散形成的,只要器件做成之后就电容大小就确定,于是结构电容是三类电容中唯一可以确定确切大小的 图片 三个沟道电容: 沟道电容,即栅到沟道之间的电容,称为CGC,即 (Gate Channel)。其中,$C_{G C}=C_{G C B}+C_{G C S}+C_{G C D}$ 即,栅至体、栅至源、栅至漏电容。 由于和沟道有关,又因为沟道形成和工作点有关,于是三个工作点下,CGC不同。 图片 图片 两个(PN)结(耗尽层)电容: PN结电容是由于源-体和漏-体之间反向偏置造成的。 由于工艺上面,我们是在体上“挖一个坑“放漏和源,故而他们之间存在着”立体“的关系。 故而需要关注”四周立体接触“,如图所示, 图片 图片 图片 我们关注的【本征电容】有哪些 我们研究电容是为了利用$\tau=R C$计算tp的值,故而我们在意的是输入和输出通路上的电容。 图片 输入电容——栅极电容 图片 2.输出电容——漏极电容 图片 4. 寄生电阻(了解) 源漏区的串联电阻。 图片 危害: 当晶体管尺寸进一步缩小,会使结变浅、接触孔变小。使得这个影响更加显著。 当给定一个电压,由于分压作用,会使得漏极电流变小。 改善: 源漏极铺一层低电阻材料(如钨或者钛) 5.求tPHL例子(重点) 图片
VLSI&IC验证
# VLSI
刘航宇
3年前
0
1,113
0
2023-02-23
VLSI设计基础1-数字IC引论:度量指标及版图基础
参考书:数字集成电路-电路、系统与设计,本文栏目对其重点进行精简化 目录 引论1. 数字设计中需解决的问题 2. 集成电路质量评价-重点 3. 数字IC基本概念-重点 4. IC全定制流程 版图基础1. CMOS版图 2. 设计规则检查 3.棍棒图 引论 1. 数字设计中需解决的问题 摩尔定律:技术突破才能推动摩尔定律 特征尺寸:28nm是传统制程和先进制程的分界点 存储器容量:存储器的容量增大,意味着功耗增大,意味着稳定性下降(发热)。如果想要实现更大容量的突破,需要寻找新技术或者新架构使功耗不能超过功耗红线 晶圆尺寸:晶圆尺寸增加,单位硅片数量增加,所需的技术越先进,最终成品芯片价格也越低 技术突破:大直径的硅片可以大大提高成品率 2. 集成电路质量评价-重点 图片 注: ① 是取决于制造工艺复杂行参数,常取值3 ②单位面积缺陷数常取值0.5~1个缺陷/cm² ③芯片成本 $=f(\text { 芯片面积 })^4$ 稳定性与功能性 噪声:电容耦合、电感耦合、地线耦合 ※※※【重点】性能——延时tp、工作频率性能常与时钟周期、时钟频率相关 重点:延时 图片 1、传播延时:输入和输入波形的50%翻转点之间的时间 如图: 定义传播时间tp为 $t_p=\frac{t_{p L H}+t_{p H L}}{2}$ 一般而言, ①TpLH和TpHL不会完全相等 ②如果要求传输延时<t,则意味着TpLH<t并且TpHL<t 图片 图片 2、上升时间tr 3、下降时间tf 功耗和能耗 取决的因素太多了。 常常有:瞬时功耗、峰值功耗(研究电源线尺寸)、平均功耗(研究冷却或者对电池的要求) 3. 数字IC基本概念-重点 电压传输特性VTC(DC传输曲线) 可接受的高电压、低电压区域:VIH和VIL定义为VTC增益=-1的点 噪声容限=min{NMH.NML} NMH=|VOH-VIH| NML=|VIL-VOL| 再生性 保证一个受干扰的信号经过若干个组合逻辑之后依旧回到一个额定电平(高或者低,不是不确定态) 抗干扰能力 方向性 6.扇入和扇出 扇入和扇出个数和一些延迟有关 4. IC全定制流程 图片 版图基础 1. CMOS版图 1、图编辑工具:virtuoso、max 2、工艺层的概念:将cmos使用中难以理解的掩膜转化为一组简单概念化的版图层 3、可伸缩的设计:将版图所有参数定义与$\lambda$,利用EDA工具使之在想要兼容的工艺间转换。如0.25转为0.18。早期的工艺中,这个缩放比例可以达到75%左右,随着如今器件尺寸的减小,该比例只有90%左右了。 不足:①由于不同工艺之间的非线性,线性缩放仅在有限尺寸范围内;②可缩放规则是保守的,结果会使得标准单元尺寸过大或者过小。 4、晶体管的尺寸由W/L指定。 给定一个工艺,最小线宽为2$\lambda$; 图片 5、在版图中,只要多晶硅穿过扩散区,就形成一个晶体管 随着工艺的发展,电源电压VDD呈现下降趋势。 2. 设计规则检查 设计规则检查工具:Calibre DRC 设定规则的目的:可以很容易的把电路的概念转换为硅上的几何关系。 Calibre的规则相当于是行业的标准了。 其规则是基于边(edge)的DRC/LVE工具,所有的计算都是基于边来计算的,其中”边“分为”内边“和”外边“ 常见的三个指令: internal:检查多边形的内边距 external:检查多边形的外边距 enclosure:检查多边形的交迭 3.棍棒图 1、要求:①将棍棒图转为管级电路图、并且写出输出表达式;②将管级电路图转化为棍棒图 2、特点: 仅用象征性的符号表示电路的拓扑结构 不需要标尺寸大小 棍棒图中棍棒的位置很重要 3、棍棒图中的串并联 以下为版图的: 串联: 图片 并联: 图片
VLSI&IC验证
# VLSI
刘航宇
3年前
0
799
2
TCL脚本语言用法简介
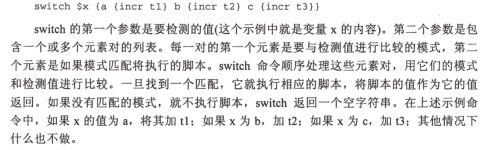
前言(TCL综述) TCL(Tool Command Language)是一种解释执行的脚本语言(Scripting Language)。 它提供了 通用的编程能力:支持变量、过程和控制结构;同时 TCL还拥有一个功能强大的固有的核心命令集。 由于TCL的解释器是用一个C\C++语言的过程库实现的,因此在某种意义上我们又可以把TCL看作一个C库,这个库中有丰富的用于扩展TCL命令的C\C++过程和函数,可以很容易就在C\C++应用程序中嵌入TCL,而且每个应用程序都可以根据自己的需要对TCL语言进行扩展。我们可以针对某一特定应用领域对TCL语言的核心命令集进行扩展,加入适合于自己的应用领域的扩展命令,如果需要,甚至可以加入新的控制结构,TCL解释器将把扩展命令和扩展控制结构与固有命令和固有控制结构同等看待。扩展后的TCL语言将可以继承TCL 核心部分的所有功能,包括核心命令、控制结构、数据类型、对过程的支持等。根据需要,我们甚至可以屏蔽掉TCL的某些固有命令和固有控制结构。通过对TCL的扩展、继承或屏蔽,用户用不着象平时定义一种计算机语言那样对词法、语法、语义、语用等各方面加以定义,就可以方便的为自己的应用领域提供一种功能完备的脚本语言。 TCL良好的可扩展性使得它能很好地适应产品测试的需要,测试任务常常会由于设计和需求的改变而迅速改变,往往让测试人员疲于应付。利用TCL的可扩展性,测试人员就可以迅速继承多种新技术,并针对产品新特点迅速推出扩展TCL命令集,以用于产品的测试中,可以较容易跟上设计需求的变化。 另外,因为TCL是一种比C\C++ 语言有着更高抽象层次的语言,使用TCL可以在一种更高的层次上编写程序,它屏蔽掉了编写C\C++程序时必须涉及到的一些较为烦琐的细节,可以大大地提高开发测试例的速度。而且, 使用TCL语言写的测试例脚本,即使作了修改,也用不着重新编译就可以调用TCL解释器直接执行。可以省却不少时间。TCL 目前已成为自动测试中事实上的标准。 目录 前言(TCL综述) 语法脚本,命令和单词符号 置换(substitution) 变量置换variable subtitution 命令置换command substitution反斜杠置换backslash substitution 双引号和花括号 变量简单变量 数组 append和incr expr List concat lindex llength linsert lreplace lrange lappend lsearch 控制流 if 循环命令:while 、for 、 foreach while for break和continue命令 switch source 过程(procedure) 附录(Tcl的安装) 直接打开终端(terminal),输入 sudo apt install tcl即可进行安装,这里的截图是笔者安装成功后的实例。 图片 之后输入tclsh即可 语法 脚本,命令和单词符号 一个TCL脚本可以包含一个或多个命令。命令之间必须用换行符或分号隔开,下面的两个脚本都是合法的: set a 1 set b 2 或使用分号隔开 set a 1;set b 2TCL解释器对一个命令的求值过程分为两部分:分析和执行。在分析阶段,TCL 解释器运用规则把命令分成一个个独立的单词,同时进行必要的置换(substitution); 在执行阶段,TCL 解释器会把第一个单词当作命令名,并查看这个命令是否有定义,如果有定义就激活这个命令对应的C/C++过程,并把所有的单词作为参数传递给该命令过程,让命令过程进行处理。 置换(substitution) TCL解释器在分析命令时,把所有的命令参数都当作字符串看待,例如: %set x 10 //定义变量x,并把x的值赋为10 10 %set y x+100 //y的值是x+100,而不是我们期望的110 x+100上例的第二个命令中,x被看作字符串x+100的一部分,如果我们想使用x的值’10’ ,就必须告诉 TCL解释器:我们在这里期望的是变量x的值,而非字符’x’。怎么告诉TCL解释器呢,这就要用到TCL语言中提供的置换功能。置换功能分为三种.TCL提供三种形式的置换:变量置换、命令置换和反斜杠置换。每种置换都会导致一个或多个单词本身被其他的值所代替。置换可以发生在包括命令名在内的每一个单词中,而且置换可以嵌套。 变量置换variable subtitution 变量置换由一个$符号标记,变量置换会导致变量的值插入一个单词中。例如之前的一个例子 %set x 10 //定义变量x,并把x的值赋为10 10 %set y x+100 //y的值是x+100,而不是我们期望的110 x+100 %set y $x+100 //y的值是我们期望的110 110命令置换command substitution 命令置换是由[]括起来的TCL命令及其参数,命令置换会导致某一个命令的所有或部分单词被另一个命令的结果所代替。例如: %set y [expr $x+100] 110这里当TCL解释器遇到字符’[‘时,它就会把随后的expr作为一个命令名,从而激活与expr对应的C/C++过程,并把expr和变量置换后得到的10+100传递给该命令过程进行处理。 反斜杠置换backslash substitution TCL语言中的反斜杠置换类似于C语言中反斜杠的用法,主要用于在单词符号中插入诸如换行符、空格、[、$等被TCL解释器当作特殊符号对待的字符。 %set msg money\ \$3333\ \nArray\ a\[2] //这个命令的执行结果为: money $3333 Array a[2]双引号和花括号 除了使用反斜杠外,TCL提供另外两种方法来使得解释器把分隔符和置换符等特殊字符当作普通字符,而不作特殊处理,这就要使用双引号和花括号({})。 TCL解释器对双引号中的各种分隔符将不作处理,但是对换行符 及$和[]两种置换符会照常处理。而在花括号中,所有特殊字符都将成为普通字符,失去其特殊意义,TCL解释器不会对其作特殊处理。 %set y "$x ddd" 100 ddd %set y {/n$x [expr 10+100]} /n$x [expr 10+100]注释 TCL中的注释符是#,#和直到所在行结尾的所有字符都被TCL看作注释,TCL解释器对注释将不作任何处理。不过,要注意的是,#必须出现在TCL解释器期望命令的第一个字符出现的地方,才被当作注释。 %set a 100 # Not a comment wrong # args: should be "set varName ?newValue?" %set b 101 ; # this is a comment 101变量 变量分为简单变量和数组 简单变量 一个 TCL 的简单变量包含两个部分:名字和值。名字和值都可以是任意字符串。 % set a 2 2 set a.1 4 4 % set b $a.1 2.1在最后一个命令行,我们希望把变量a.1的值付给b,但是TCL解释器在分析时只把$符号之后直到第一个不是字母、数字或下划线的字符(这里是’.’)之间的单词符号(这里是’a’)当作要被置换的变量的名字,所以TCL解释器把a置换成2,然后把字符串“2.1”付给变量b。这显然与我们的初衷不同。 当然,如果变量名中有不是字母、数字或下划线的字符,又要用置换,可以用花括号把变量名括起来。例如: %set b ${a.1} 4数组 数组是一些元素的集合。TCL的数组和普通计算机语言中的数组有很大的区别。在TCL中,不能单独声明一个数组,数组只能和数组元素一起声明。数组中,数组元素的名字包含两部分:数组名和数组中元素的名字,TCL中数组元素的名字(下标〕可以为任何字符串。 例如: set day(monday) 1 set day(tuesday) 2 set a monday set day(monday) 1 set b $day(monday) //b 的值为 1 ,即 day(monday) 的值。 set c $day($a) //c 的值为 1 ,即 day(monday) 的值。其他命令 unset % unset a b day(monday)上面的语句中删除了变量a、b和数组元素day(monday),但是数组day并没有删除,其他元素还存在,要删除整个数组,只需给出数组的名字。 append和incr 这两个命令提供了改变变量的值的简单手段。 append命令把文本加到一个变量的后面,例如: % set txt hello hello % append txt "! How are you" hello! How are youincr命令把一个变量值加上一个整数。incr要求变量原来的值和新加的值都必须是整数。 expr 可以进行基本的数学函数计算 %expr 1 + 2*3 7List list这个概念在TCL中是用来表示集合的。TCL中list是由一堆元素组成的有序集合,list可以嵌套定 义,list每个元素可以是任意字符串,也可以是list。下面都是TCL中的合法的list: {} //空list {a b c d} {a {b c} d} //list可以嵌套list是TCL中比较重要的一种数据结构,对于编写复杂的脚本有很大的帮助 list 语法: list ? value value…? 这个命令生成一个list,list的元素就是所有的value。例: % list 1 2 {3 4} 1 2 {3 4}使用置换将其相结合 % set a {1 2 3 4 {1 2}} 1 2 3 4 {1 2} % puts $a 1 2 3 4 {1 2}concat 语法:concat list ?list…? 这个命令把多个list合成一个list,每个list变成新list的一个元素。 % set a {1 2 3} 1 2 3 % set b {4 5 6} 4 5 6 % concat $a $b 1 2 3 4 5 6lindex 语法:lindex list index 返回list的第index个(0-based)元素。例: % lindex {1 2 {3 4}} 2 3 4llength 语法:llength list 返回list的元素个数。例 % llength {1 2 {3 4}} 3 % set a {1 2 3} 1 2 3 % llength $a 3linsert 语法:linsert list index value ?value…? 返回一个新串,新串是把所有的value参数值插入list的第index个(0-based)元素之前得到。例: % linsert {1 2 {3 4}} 1 7 8 {9 10} 1 7 8 {9 10} 2 {3 4} % linsert {1 2 {3 4}} 1 {1 2 3 {4 5}} 1 {1 2 3 {4 5}} 2 {3 4} % set a {1 2 3} 1 2 3 % linsert $a 1 {2 3 4} 1 {2 3 4} 2 3lreplace 语法:lreplace list first last ?value value …? 返回一个新串,新串是把list的第firs (0-based)t到第last 个(0-based)元素用所有的value参数替换得到的。如果没有value参数,就表示删除第first到第last个元素。例: % lreplace {1 7 8 {9 10} 2 {3 4}} 3 3 1 7 8 2 {3 4} % lreplace {1 7 8 2 {3 4}} 4 4 4 5 6 1 7 8 2 4 5 6 % set a {1 2 3} 1 2 3 % lreplace $a 1 2 4 5 6 7 1 4 5 6 7 % lreplace $a 1 end 1lrange 语法:lrange list first last 返回list的第first (0-based)到第last (0-based)元素组成的串,如果last的值是end。就是从第first个直到串的最后。 例: % lrange {1 7 8 2 4 5 6} 3 end 2 4 5 6 % set a {1 2 3} 1 2 3 % lrange $a 0 end 1 2 3lappend 语法:lappend varname value ?value…? 把每个value的值作为一个元素附加到变量varname后面,并返回变量的新值,如果varname不存在,就生成这个变量。例: % set a {1 2 3} 1 2 3 % lappend a 4 5 6 1 2 3 4 5 6lsearch 语法:lsearch ?-exact? ?-glob? ?-regexp? list pattern 返回list中第一个匹配模式pattern的元素的索引,如果找不到匹配就返回-1。-exact、-glob、 -regexp是三种模式匹配的技术。-exact表示精确匹配;-glob的匹配方式和string match命令的匹配方式相同;-regexp表示正规表达式匹配。缺省时使用-glob匹配。例: % set a { how are you } how are you % lsearch $a y* 2 % lsearch $a y? -1-all 返回一个列表,返回的列表中的数值就是字符在列表中的位置 默认全局匹配,返回第一个字符在列表中的位置,其位缺省状态 % lsearch {a b c d e} c 2 % lsearch -all {a b c a b c} c 2 5 % lsearch {a b c d c} c 2匹配不到返回-1 % lsearch {a b c d e} g -1控制流 主要是对于所有的控制流,包括 if、while、for、foreach、switch、break、continue 等以及过程, if 语法: if test1 body1 ?elseif test2 body2 elseif…. ? ?else bodyn? TCL先把test1当作一个表达式求值,如果值非0,则把body1当作一个脚本执行并返回所得值,否则把test2当作一个表达式求值,如果值非0,则把body2当作一个脚本执行并返回所得值……。例如: if { $x>0 } { ..... }elseif{ $x==1 } { ..... }elseif { $x==2 } { .... }else{ ..... }if { $x<0 } { puts "x is smaller than zero" } elseif {$x==1} { puts "x is equal 1" } elseif {$x==2} { puts "x is equal 2" } else { puts "x is other" } 这里需要注意的是, if 和{之间应该有一个空格,否则TCL解释器会把’if{‘作为一个整体当作一个命令名,从而导致错误。 ‘{‘一定要写在上一行,因为如果不这样,TCL 解释器会认为if命令在换行符处已结 束,下一行会被当成新的命令,从而导致错误的结果需要将}{ 分开写, 否则会报错extra characters after close-brace 循环命令:while 、for 、 foreach while 语法为: while test body 参数test是一个表达式,body是一个脚本,如果表达式的值非0,就运行脚本,直到表达式为0才停止循环,此时while命令中断并返回一个空字符串。 例如:假设变量 a 是一个链表,下面的脚本把a 的值复制到b: % #首先生成一个集合 % set a {1 2 3 4} 1 2 3 4 % set b " " % #计算生成集合的长度(从0开始这里需要减去1例如:0-3一共有四个数) % set i [expr [llength $a] -1] 3 #接下来进行判断,将集合a中的元素全部按顺序写入b中 % while {$i>=0} { #思考执行该行代码替换会有怎样的结果打印出来 #lappend b [lindex $a $i] lappend b [lindex $a [expr [llength $a] - 1 - $i]] incr i -1 } #打印观察结果 % puts $b 1 2 3 4对代码进行分析 set 变量a为一个list,b为一个空list 然后计算列表里有几个元素,将其减一后的值赋值给i,这里减一的目的是从零开始计数会多一个 开始进行循环,首先i的值是4大于0,表达式为真,开始执行脚本。 脚本为将数组a的第i个位置的元素添加到b list 里,然后给i减一同时进行下一次判断即可。 最后输出b的值 for 语法为: for init test reinit body 参数init是一个初始化脚本,第二个参数test是一个表达式,用来决定循环什么时候中断,第三个参数reinit是一个重新初始化的脚本,第四个参数body也是脚本,代表循环体。下例与上例作用相同:(注意这里复制打印顺序的不同) % set a {1 2 3 4} 1 2 3 4 % set b " " % for {set i [expr [llength $a] -1]} {$i>=0} {incr i -1} { lappend b [lindex $a $i] } % puts $b 4 3 2 1例 % for {set i 0} {$i<4} {incr i} { puts "I is: $i " } I is: 0 I is: 1 I is: 2 I is: 3 foreach 这个命令有两种语法形式 1, foreach varName list body 第一个参数varName是一个变量,第二个参数list 是一个表(有序集合),第三个参数body是循环体。每次取得链表的一个元素,都会执行循环体一次。 下例与上例作用相同: % set a {1 2 3 4} 1 2 3 4 % set b " " % foreach i $a { set b [linsert $b 0 $i] } % puts $b 4 3 2 1% foreach var {a b c d e f} { puts $var } a b c d e f2, foreach varlist1 list1 ?varlist2 list2 ...? Body 这种形式包含了第一种形式。第一个参数varlist1是一个循环变量列表,第二个参数是一个列表list1,varlist1中的变量会分别取list1中的值。body参数是循环体。 ?varlist2 list2 …?表示可以有多个变量列表和列表对出现。例如: set x {} foreach {i j} {a b c d e f} { lappend x $j $i }这时总共有三次循环,x的值为”b a d c f e”。 % foreach i {a b c} j {d e f g} { puts $i puts $j } a d b e c f gset x {} foreach i {a b c} j {d e f g} { lappend x $i $j }这时总共有四次循环, x的值为”a d b e c f {} g set x {} foreach i {a b c} {j k} {d e f g} { lappend x $i $j $k }这时总共有三次循环,x的值为”a d e b f g c {} {}”。 例子: 图片 break和continue命令 在循环体中,可以用break和continue命令中断循环。其中break命令结束整个循环过程,并从循环中跳出,continue只是结束本次循环 这里有一个特别好的例子 说明:这里首先进行给一个list,然后使用foreach循环进行写入数据当遇见break时候直接退出了循环,而continue仅仅只是跳出此次循环继续向b里写入数 % set b {} % set a {1 2 3 4 5} 1 2 3 4 5 % foreach i $a { if {$i == 4} break set b [linsert $b 0 $i] } % puts $b 3 2 1% set b {} % set a {1 2 3 4 5} 1 2 3 4 5 % foreach i $a { if {$i == 4} continue set b [linsert $b 0 $i] } % puts $b 5 3 2 1switch 和 C 语言中 switch 语句一样,TCL 中的 switch 命令也可以由 if 命令实现。只是书写起来较为烦琐。 switch 命令的语法为: switch ? options? string { pattern body ? pattern body …?} 注意这里进行的是字符匹配 图片 set x a; set t1 0;set t2 0;set t3 0; switch $x { a - b {incr t1} c {incr t2} default {incr t3} } puts "t1=$t1,t2=$t2,t3=$t3"x=a时执行的是t1加2 其中 a 的后面跟一个’-’表示使用和下一个模式相同的脚本。default 表示匹配任意值。一旦switch 命令 找到一个模式匹配,就执行相应的脚本,并返回脚本的值,作为 switch 命令的返回值。 source source 命令读一个文件并把这个文件的内容作为一个脚本进行求值 以上边的switch第一段代码为例 使用VIM新建一个文件,写入文件后保存退出 vim switch1.tcl键入wish然后输入source switch1.tcl 图片 过程(procedure) TCL 支持过程的定义和调用,在 TCL 中,过程可以看作是用 TCL 脚本实现的命令,效果与 TCL的固有命令相似。我们可以在任何时候使用 proc 命令定义自己的过程,TCL 中的过程类似于 C中的函数。 TCL 中过程是由 proc 命令产生的: 例如: % proc add {x y } {expr $x+$y} roc 命令的第一个参数是你要定义的过程的名字,第二个参数是过程的参数列表,参数之间用空格隔开,第三个参数是一个 TCL 脚本,代表过程体。 proc 生成一个新的命令,可以象固有命令一样调用: % add 1 2 3
编程&脚本笔记
# TCL脚本
刘航宇
3年前
0
1,750
0
2023-01-29
CSA&4-2压缩器电路设计及verilog代码
进位保留加法器和4-2压缩加法器是加法阵列中主要采用基本单元 目录 CSA-保留进位加法器 32计数器/32压缩器 5-3计数器/53压缩器 4-2压缩器 Verilog代码 CSA-保留进位加法器 保留进位加法器( carry-save-adder)即为一位全加器 逻辑表达式: \begin{aligned} & S_i=A_i \oplus B_i \oplus C_{i-1} \ & C_i=A_i B_i+C_{i-1}\left(A_i+B_i\right) \end{aligned} CSA电路结构图 图片 图片 如果把保留进位加法器的进位端输出到下一级 图片 这样第一级的延时为一个进位保留加法器的延时 32计数器/32压缩器 此进位保留加法器输入3个一位的数据A、B、Ci; 输出两个1位的数据D、Co。 代数运算式如下: Co*2+D=A+B+Ci ●非常明显,保留进位加法器为一计数器--计算输入信号中“1”的个数,计数值由Co、D指示,且: ●Co权值为2; A、B、Ci、D权值为1。 ●其逻辑表达式如下: \begin{aligned} & D=A @ B @ C i \ & C o=A \& B \# A \& C i \# C i \& A \end{aligned} 5-3计数器/53压缩器 ●CSA将3个数据转换成2个数据为3-2计数器,如果能把5个数据转换成3个数据则称之为5-3计数器。 ●它有五个输入端: I0、I1、I2、I3、Ci; 三个输出端: D、C、Co。 ●代数运算式如下: $$ D+C * 2+C_0 * 2=10+11+12+13+C i $$即: I0、 l1、 12、13、Ci、D权值为1; C、Co权值为2。 其真值表如下页: 图片 图片 有数据表示优化后的结构可以减小门延时,传统结构为2个CSA延时,而优化后的延时大约为1.5个CSA延时 4-2压缩器 ●如果连续的两个高低位5-3计数器之间Ci和Co级联的话,则称为4-2压缩加法器 ●如下图 图片 42压缩加法器 图片 ●对于更多位的部分积也有其他的一些结构树,结构的选取要考虑到电路结构的规整 性对后端布局的影响。 ●左边延时比较小但结构不规整。右边正好相反有时候会选取一些折中的结构。 Verilog代码 //----------------------------------------------------------------------- //module : compressor42 //Description : The function of this module is to compress the partial product //----------------------------------------------------------------------- //author : li hangyu //Email : hyliu@ee.ac.cn //time : 01/28, 2023 //----------------------------------------------------------------------- `timescale 1ns/1ps module compressor42 ( in1,in2,in3,in4,cin,out1,out2,cout ); parameter length = 8; input [length*2-1 : 0] in1,in2,in3,in4; input cin; output [length*2 : 0] out1,out2; output cout; wire [length*2-1 : 0] w1,w2,w3; assign w1 = in1 ^ in2 ^ in3 ^ in4; assign w2 = (in1 & in2) | (in3 & in4); assign w3 = (in1 | in2) & (in3 | in4); assign out2 = { w1[length*2-1] , w1} ^ {w3 , cin}; assign cout = w3[length*2-1]; assign out1 = ({ w1[length*2-1] , w1} & {w3 , cin}) | (( ~{w1[length*2-1] , w1}) & { w2[length*2-1] , w2}); endmodule
VLSI&IC验证
# VLSI
刘航宇
3年前
0
3,290
12
2023-01-14
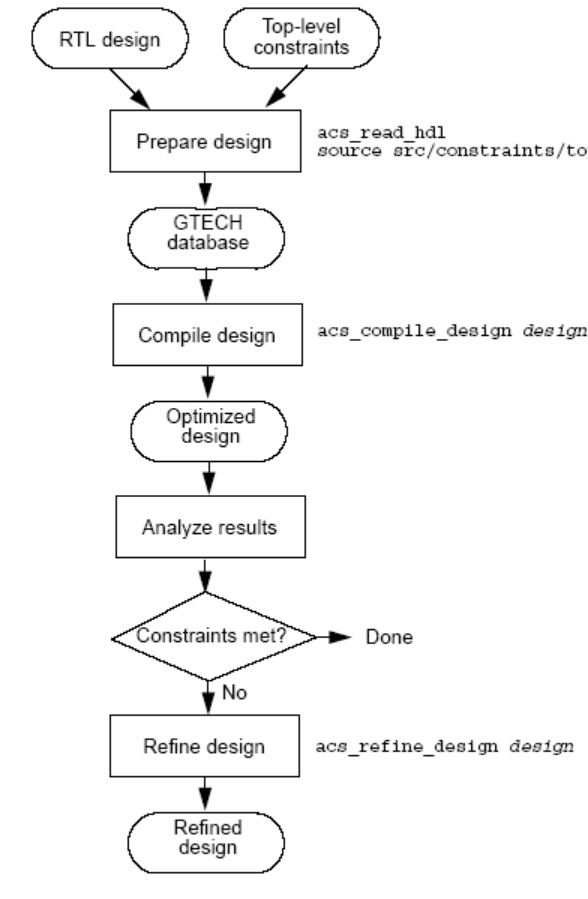
Design Compile(DC)使用简版
Design Compile是synopsys的综合软件,它的功能是把RTL级的代码转化为门级网表。综合包括转译(Translation),优化(Opitimization),映射(Mapping)三个过程。在转译的过程中,软件自动将源代码翻译成每条语句所对应的功能模块以及模块之间的拓扑结构,这一过程是在综合器内部生成电路的布尔函数的表达,不做任何的逻辑重组和优化。优化:基于所施加的一定时序和面积的约束条件,综合器按照一定的算法对转译结果作逻辑优化和重组。在映射过程中,根据所施加的一定的时序和面积的约束条件,综合器从目标工艺库中搜索符合条件的单元来构成实际电路。 图片 DC 又称为设计综合 将设计的RTL代码综合成门级网表的过程。 在 DC 流程中 一般要经过以下几个步骤,以项目A为例 做如下分析: 1】 在项目子目录下创建DC文件夹,在DC文件夹下分别创建db in lib_syn log netlist rpt和 script 文件夹 以及一个makefile 文件用来运行DC 脚本 。 2】 第二步就是复制相应工艺技术库文件到lib_syn ,一般有2种文件各3个分别包括了typical worst 和 best情况,一类是db,文件一类是lib 文件 也可以在lc_shell 下读取lib 得到相应的db文件。 3】 第三步将需要综合的设计RTL代码(Verilog 文件)复制到in 文件夹 4】 第四步在script 创建综合脚本,脚本创建过程将在后面介绍 5】 第五步编写运行脚本的makefile 文件 6】 第六步运行脚本而后查看综合报告,是否有违例现象出现,如果有修改脚本加以修复直到最终通过设计。 注意 另外的几个文件夹作用 db文件夹存放DC综合生成的项目db文件,综合网表输出到netlist 文件夹,综合程序运行报告存放在log文件夹中,而综合结果的数据报告则存放在rpt 文件夹中。 DC脚本的编写(A.scr) DC综合脚本基本上有几大部分组成 1】定义综合环境中命名规则(分别对net cell port 命名) define_name_rules verilog –casesensitive define_name_rules verilog –type net –allowed “a-z A-Z 0-9 _ ” \ -first_restricted “ _ 0-9 N ” \ -replacement_char “_ ” \ -prefix “n” define_name_rules verilog –type cell –allowed “a-z A-Z 0-9 _ ” \ -first_restricted “ _ 0-9 ” \ -replacement_char “_” \ -prefix “u” define_name_rules verilog –type port –allowed “a-z A-Z 0-9 _ ” \ -first_restricted “ _ 0-9 ” \ -replacement_char “_” \ -prefix “p”2】综合环境的建立 指明库所在的位置 Search_path = { lib_syn/db } 指定综合所需目标库一般选用最恶劣情况worst 库作目标库 target_library = { slow.db} 创建链接库,链接库中包括了一些已经做好的设计和子模块,又包括了当前设计的目标库是设计实例化时所用的库文件 link_library = { “ * ” , slow.db } + synthetic_library 在上述的环境建立所需的各类库中,一般有生产商提供目标库,库中的各类cell用于逻辑映射,链接库则包括了目标库,还包括其他一些以前设计实例基本单元,我们门级网表实例化元件和单元都来自于它。 3】RTL 代码的读入 read –format verilog ./in/ Encoder_32k.v read –format verilog ./in/ Encoder_DBLOCK.v read –format verilog ./in/ Encoder.v read –format verilog ./in/ Step_rom.v指明设计顶层 current_design = Encoder 展开设计分解原设计组 ungroup -all –flatten 设计唯一实例化 uniquify 4】综合环境约束 用户往往需要设置worst case 和 best case 的库来验证setup timing 修复 hold timing 不清楚命令使用和属性 可使用 man set_min_library 查看 set_min_library lib_syn/db/slow.db -min_version lib_syn/db/fast.db 编译操作条件的表述 set_operating_conditions -min slow –min_library slow \ -max fast –max_library fast 设置wire_load_model wire_load_model 负载模型的每一种模型定义,它定义相关的net_length 和 net fanout 属性 而wire_load_mode 则不同指的是不同logic margin 连线net的处理方式 一般我们只设置前者 set_wire_load_model -name “ Silterra18_w110 ” –min set_wire_load_model -name “ Silterra18_w110 ” –max设置模块输入驱动强度信息 man set_driving_cell 查看帮助 set_driving_cell -lib_cell BUFX1 –pin Y –library slow –dont_scale –no_design_rule all_input ( )5】设计时钟相关约束 create_clock clk -period 40 set_clock_latency 0.3 –rise { clk } set_clock_latency 0.3 –fall { clk } set_clock_uncertainty –setup 0.3 { clk } set_clock_uncertainty –hold 0.3 { clk }6】禁止改变门电路控制结构 芯片中的时钟和复位电路一般由门电路控制的,我们不希望DC在综合时候改变它的结构以保证时钟信号和复位信号的稳定性和可靠性需要设置,禁止对某些单元进行优化 set_dont_touch_network { clk, rstn } set_dont_touch { rstn }7】异步电路处理 任何跨越异步边界的路径我们都对其禁止时序分析 set_false_path -from { rstn } –to { clk } 8】设置其他可选约束和禁用单元 可选约束一般包括 set_max_fanout set_max_capacitance set_max_transition set_load 等 这些属性一般在技术库中已经设置了,只有技术库不能满足设计要求时才使用脚本增加约束选项 本脚本中只增加了 set_load 0.02 all_output ( ) Set_max_transition 2.5 current_design 输入输出直通buffer 插入,多重端口的连接插入buffer (选用) set_fix_multiple_port_nets –feedthrough 输出端口插入buffer , 隔离端口 (必须) set_isolate_ports –type buffer all_output ( ) 9】检查设计层次关系进行单元映射 check_design –one_level compile –map_effort medium10】修复hold时序 重新编译 set_fix_hold {clk } compile –only_hold_time 11】导出编译综合相关报告 核对网表命名规则修改相关信息 change_names –rules verilog –hierarchy –verbose 检查整体设计导出报告 check_design > ./rpt/adpcm.rpt 移除未连接的相关端口 remove_unconnected_ports find ( hierarchy cell , “ * ”) 导出设计面积报告 report_area > ./rpt/adpcm_area.txt 导出设计违例报告 report_constraint –all_violators > ./rpt/adpcm_cons.txt 导出setup时序违例的详细报告 report_timing –nworst 50 > ./rpt/adpcm_max_time.txt 导出hold 时序违例的详细报告 report_timing -delay min –nworst 20 > ./rpt/adpcm_min_time.txt 导出综合的设计中cell和reg_cel的报告 report_cell > ./rpt/adpcm_cell.txt report_cell {find (cell, “* _reg *”)} > ./rpt/adpcm_reg_cell.txt12】生成综合网表和pnr 所需的时序约束文件 write -hierarchy -output ./db/adpcm.db write -format verilog –hierarchy -output ./netlist/adpcm.sv write_sdf ./netlist/adpcm.sdf write_sdc ./netlist/adpcm.sdc exit13】compile-ultra 图片
EDA&虚拟机
# EDA&虚拟机
刘航宇
3年前
0
1,566
0
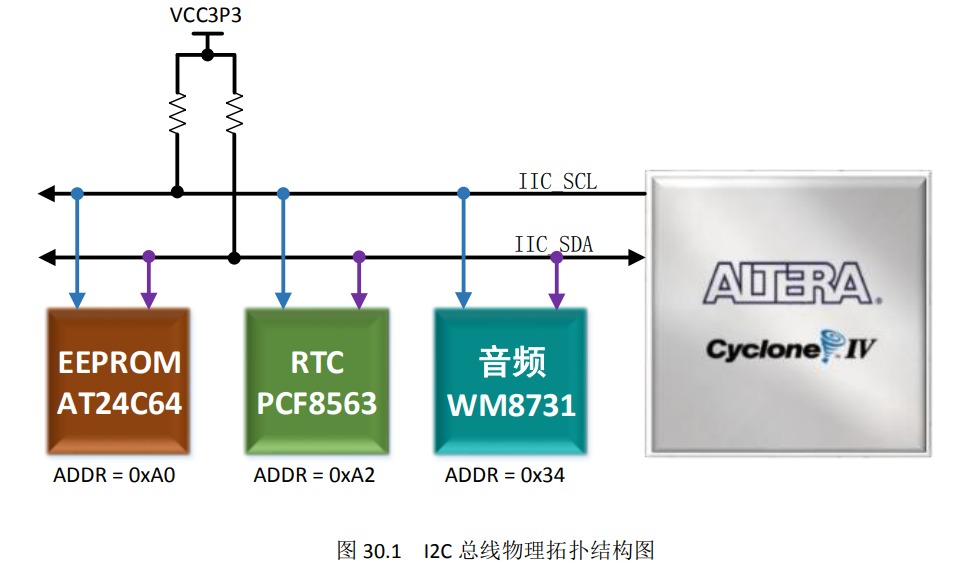
I2C协议及verilog实现-串口读写 EEPROM
I2C 基本概念 I2C 总线(I2C bus,Inter-IC bus)是一个双向的两线连续总线,提供集成电路(ICs)之间的通信线路。I2C 总线是一种串行扩展技术,最早由 Philips 公司推出,广泛应用于电视,录像机和音频设备。I2C 总线的意思是“完成集成电路或功能单元之间信息交换的规范或协议”。Philips 公司推出的 I2C 总线采用一条数据线(SDA),加一条时钟线(SCL)来完成数据的传输及外围器件的扩展。I2C 总线物理拓扑结构如图 30.1 所示。 图片 I2C 总线在物理连接上比较简单,分别由 SDA(串行数据线)和 SCL(串行时钟线)两条总线及上拉电阻组成。通信的原理是通过控制 SCL 和 SDA 的时序,使其满足 I2C 的总线协议从而进行数据的传输。 I2C 总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址(可以从 I2C 器件数据手册得知),主从设备之间就是通过这个地址来确定与哪个器件进行通信。本次实验我们把 FPGA 作为主设备,把挂载在总线上的其他设备(如 EEPROM、PFC8563 等 I2C 器件)作为从设备。 I2C 总线数据传输速率在标准模式下可达 100kbit/s,快速模式下可达 400kbit/s,高速模式下可达 3.4Mbit/s。I2C 总线上的主设备与从设备之间以字节(8 位)为单位进行双向的数据传输。 目录 I2C 基本概念 I2C 协议时序介绍 inout信号原理 I2C 器件地址 I2C 存储器地址 I2C 单字节写时序 I2C 连续写时序(页写时序) I2C 单字节读时序 I2C 连续读时序(页读取) I2C 读写器件控制程序 本节小结 I2C 协议时序介绍 I2C 协议整体时序图如图 30.2 所示 图片 I2C 协议整体时序说明如下: (1) 总线空闲状态:SDA 为高电平,SCL 为高电平; (2) I2C 协议起始位:SCL 为高电平时,SDA 出现下降沿,产生一个起始位; (3) I2C 协议结束位:SCL 为高电平时,SDA 出现上升沿,产生一个结束位; (4) I2C 读写数据状态:主要包括数据的串行输出输入和数据接收方对数据发送方的响应信号。具体时序如图 30.3 所示。 图片 当 I2C 主机(后面简称主机)向 I2C 从机(后面简称从机)写入数据时,SDA 上的每一位数据在 SCL 的高电平期间被写入从机中。从主机角度来看,需要在 SCL 低电平期间改变要写入的数据。而当主机读取从机中数据时,从机在 SCL 低电平期间将数据输出到 SDA 总线上,在 SCL 的高电平期间保持数据稳定,从主机角度来看,需要在 SCL 的高电平期间将 SDA 线上的数据读取并存储。 每当一个字节的数据或命令传输完成时,数据接收方都会向发送方响应一位应答位。在响应应答位时,数据发出方将 SDA 总线设置为三态输入,由于 I2C 总线上都有上拉电阻,因此此时总线默认为高电平,若数据接收方正确接收到数据,则数据接收方将 SDA 总线拉低,以示正确应答。例如当主机向从机写入数据或命令时,每个字节都需要从机产生应答信号以告诉主机此次的数据或命令是否成功被写入。所以,当主机将一字节的数据或命令传出后,会将 SDA 信号设置为三态输入,等待从机应答(等待 SDA 被从机拉低为低电平),若从机正确应答,表明当前数据或命令传输成功,可以结束或开始下一个数据或命令的传输,否则表明数据或命令写入失败,主机就可以决定是否放弃写入或者重新发起写入。 inout信号原理 图片 图片 I2C 器件地址 每个 I2C 器件都有一个器件地址,有的器件地址在出厂时地址就设置好了,用户不可以更改(例如 OV7670 器件地址为固定的 0x42),有的确定了几位,剩下几位由硬件确定(比如常见的 I2C 接口的 EEPROM 存储器,留有 3 个控制地址的引脚,由用户自己在硬件设计时确定)。严格讲,主机不是直接向从机发送地址,而是主机往总线上发送地址,所有的从机都能接收到主机发出的地址,然后每个从机都将主机发出的地址与自己的地址比较,如 果匹配上了,这个从机就会向主机发出一个响应信号。主机收到响应信号后,开始向总线上发送数据,与这个从机的通讯就建立起来了。如果主机没有收到响应信号,则表示寻址失败。 通常情况下,主从器件的角色是确定的,也就是说从机一直工作在从机模式。不同器件定义地址的方式是不同的,有的是软件定义,有的是硬件定义。例如某些单片机的I2C 接口作为从机时,其器件地址是可以通过软件修改从机地址寄存器确定的。而对于一些其他器件,如 CMOS 图像传感器、EEPROM 存储器,其器件地址在出厂时就已经设定好了,具体值可以在对应的数据手册中查到。 对于 AT24C64 这样一颗 EEPROM 器件,其器件地址为 1010 加 3 位的片选信号。3位片选信号由硬件连接决定。例如 SOIC 封装的该芯片 PIN1、PIN2、PIN3 为片选地址。当硬件电路上分别将这三个 pin 连接到 GND 或 VCC 时,就可以设置不同的片选地址。I2C 协议在进行数据传输时,主机需要首先向总线上发出控制命令,其中,控制命令就包含了从机地址/片选信号+读写控制。然后等待从机响应。如图 30.4 所示为 I2C 控制命令传输的数据格式。 图片 I2C 传输时,按照从高到低的位序进行传输。控制字节的最低位为读写控制位,当该位为 0 时表示主机对从机进行写操作,当该位为 1 时表示主机对从机进行读操作。例如,当需要对片选地址为 100 的 AT24LC64 发起写操作,则控制字节应该为 1010_100_0。若进行读操作,则控制字节应该为 1010_100_1。 I2C 存储器地址 每个支持 I2C 协议的器件,内部总会有一些可供读写的寄存器或存储器,例如,对于我们用到的 EEPROM 存储器,内部就是顺序编址的一系列存储单元。对于我们常接触的 CMOS 摄像头如 OV7670(OV7670 的该接口叫 SCCB 接口,其实质也是一种特殊的 I2C协议,可以直接兼容 I2C 协议),其内部就是一系列编址的可供读写的寄存器。因此,我们要对一个器件中的存储单元(寄存器和存储器以下简称存储单元)进行读写,就必须要能够指定存储单元的地址。I2C 协议设计了有从机存储单元寻址地址段,该地址段为一个字或两个字节长度,在主机确认收到从机返回的控制字节响应后由主机发出。地址段长度视不同的器件类型,长度不同,例如同是 EEPROM 存储器,AT24C04 的址段长度为一个字节,而 AT24C64 的地址段长度为两个字节。具体是一个字节还是两个字节,与器件的存储单元数量有关。如图 30.5 和图 30.6 分别为 1 字节地址和 2 字节地址器件的地址分布图,其中 1 字节地址的器件是以内存为 1kbit 的 EEPROM 存储器 AT24C01 举例,2 字节地址的器件是以内存为 64kbit 的 EEPROM 存储器 AT24C64 举例的。 图片 I2C 单字节写时序 根据前面讲的,不同器件,I2C 器件地址字节不同,这样对于 I2C 单字节写时序就会有所差别,图 30.7 和图 30.8 分别为 1 字节地址段器件和 2 字节地址段器件单字节写时序图。 图片 图片 根据时序图,从主机角度来描述一次写入单字节数据过程如下: a. 主机设置 SDA 为输出; b. 主机发起起始信号; c. 主机传输器件地址字节,其中最低位为 0,表明为写操作; d. 主机设置 SDA 为三态门输入,读取从机应答信号; e. 读取应答信号成功,主机设置 SDA 为输出,传输 1 字节地址数据; f. 主机设置 SDA 为三态门输入,读取从机应答信号; g. 读取应答信号成功,对于两字节地址段器件,传输地址数据低字节,对于 1 字节地址段器件,主机设置 SDA 为输出,传输待写入的数据; h. 设置 SDA 为三态门输入,读取从机应答信号,对于两字节地址段器件,接着步骤 i;对于 1 字节地址段器件,直接跳转到步骤 k; i. 读取应答信号成功,主机设置 SDA 为输出,传输待写入的数据(对于两字节地址段器件); j. 设置 SDA 为三态门输入,读取从机应答信号(两字节地址段器件); k. 读取应答信号成功,主机产生 STOP 位,终止传输。 I2C 连续写时序(页写时序) 注:I2C 连续写时序仅部分器件支持。 连续写是主机连续写多个字节数据到从机,这个和单字节写操作类似,连续多字节写操作也是分为 1 字节地址段器件和 2 字节地址段器件的写操作,图 30.9 和图 30.10 分别为 1 字节地址段器件和 2 字节地址段器件连续多字节写时序图。 图片 根据时序图,从主机角度来描述一次写入多字节数据过程如下: a. 主机设置 SDA 为输出; b. 主机发起起始信号; c. 主机传输器件地址字节,其中最低位为 0,表明为写操作; d. 主机设置 SDA 为三态门输入,读取从机应答信号; e. 读取应答信号成功,主机设置 SDA 为输出,传输 1 字节地址数据; f. 主机设置 SDA 为三态门输入,读取从机应答信号; g. 读取应答信号成功后,主机设置 SDA 为输出,对于两字节地址段器件,传输低字节地址数据,对于 1 字节地址段器件,传输待写入的第 1 个数据 h. 设置 SDA 为三态门输入,读取从机应答信号,对于两字节地址段器件,接着步骤 i;对于 1 字节地址段器件,直接跳转到步骤 k; i. 读取应答信号成功后,主机设置 SDA 为输出,传输待写入的第 1 个数据(两字节地址段器件); j. 设置 SDA 为三态门输入,读取从机应答信号(两字节地址段器件); k. 读取应答信号成功后,主机设置 SDA 为输出,传输待写入的下一个数据; l. 设置 SDA 为三态门输入,读取从机应答信号;n 个数据被写完,转到步骤 m,若数据未被写完,转到步骤 k; m. 读取应答信号成功后,主机产生 STOP 位,终止传输。 注:对于 AT24Cxx 系列的 EEPROM 存储器,一次可写入的最大长度为 32 字节。 I2C 单字节读时序 同样的,I2C 读操作时序根据不同 I2C 器件具有不同的器件地址字节数,单字节读操作分为 1 字节地址段器件单节数据读操作和 2 字节地址段器件单节数据读操作。图30.11 和图 30.12 分别为 不同情况的时序图。 图片 根据时序图,从主机角度描述一次读数据过程,如下: a. 主机设置 SDA 为输出; b. 主机发起起始信号; c. 主机传输器件地址字节,其中最低位为 0,表明为写操作; d. 主机设置 SDA 为三态门输入,读取从机应答信号; e. 读取应答信号成功,主机设置 SDA 输出,传输 1 字节地址数据; f. 主机设置 SDA 为三态门输入,读取从机应答信号; g. 读取应答信号成功,主机设置 SDA 输出,对于两字节地址段器件,传输低字节地址数据;对于 1 字节地址段器件,无此步骤,直接跳转到步骤 h; h. 主机发起起始信号; i. 主机传输器件地址字节,其中最低位为 1,表明为读操作; j. 设置 SDA 为三态门输入,读取从机应答信号; k. 读取应答信号成功,主机设置 SDA 为三态门输入,读取 SDA 总线上的一个字节的数据; l. 产生无应答信号(高电平)(无需设置为输出高电平,因为总线会被自动拉高);m. 主机产生 STOP 位,终止传输。 I2C 连续读时序(页读取) 连续读是主机连续从从机读取多个字节数据,这个和单字节读操作类似,连续多字节读操作也是分为 1 字节地址段器件和 2 字节地址段器件的读操作,图 30.13 和图 30.14 分别为 1 字节地址段器件和 2 字节地址段器件连续多字节读时序图。 图片 根据时序图,从主机角度描述多字节数据读取过程如下: a. 主机设置 SDA 为输出 b. 主机发起起始信号 c. 主机传输器件地址字节,其中最低位为 0,表明为写操作。 d. 主机设置 SDA 为三态门输入,读取从机应答信号。 e. 读取应答信号成功,主机设置 SDA 输出,传输 1 字节地址数据 f. 主机设置 SDA 为三态门输入,读取从机应答信号。 g. 读取应答信号成功,主机设置 SDA 输出,对于两字节地址段器件,传输低字节地址数据;对于 1 字节地址段器件,无此步骤;直接跳转到步骤h; h. 主机发起起始信号; i. 主机传输器件地址字节,其中最低位为 1,表明为读操作; j. 设置 SDA 为三态门输入,读取从机应答信号; k. 设置 SDA 为三态门输入,读取 SDA 总线上的第 1 个字节的数据; l. 主机设置 SDA 输出,发送一位应答信号; m. 设置 SDA 为三态门输入,读取 SDA 总线上的下一个字节的数据;若 n 个字节数据读完成,跳转到步骤 n,若数据未读完,跳转到步骤 l;(对于 AT24Cxx,一次读取长度最大为 32 字节,即 n 不大于 32) n. 主机设置 SDA 输出,产生无应答信号(高电平)(无需设置为输出高电平,因为总线会被自动拉高); o. 主机产生 STOP 位,终止传输。 I2C 读写器件控制程序 通过上述的讲述,对 I2C 读写器件数据时序有了一定的了解,下面将开始进行控制程序的设计。根据上面 I2C 的基本概念中有关读写时 SDA 与 SCL 时序,不管对于从机还是主机,SDA 上的每一位数据在 SCL 的高电平期间保持不变,而数据的改变总是在 SCL的低电平期间发生。因此,我们可以选用 2 个标志位对时钟 SCL 的高电平和低电平进行标记,如下图所示:scl_high 对 SCL 高电平期间进行标志,scl_low 对 SCL 低电平期间进行标志。这样就可以在 scl_high 有效时读 SDA 数据,在 scl_low 有效时改变数据。scl_high和 scl_low 产生的时序图如图 30.15 所示。 图片 在本实验中,时钟信号 SCL 采用计数器方法产生,计数器最大计数值为系统时钟频率除以 SCL 时钟频率,即:SCL_CNT_M = SYS_CLOCK/SCL_CLOCK。对于 scl_high 和 scl_low则只需要分别在计数到四分之一的最大值和四分之三的最大值时产生标志位即可,具体的时钟信号 SCL 和标志信号 scl_high、scl_low 产生实现代码如下: //系统时钟采用 50MHz parameter SYS_CLOCK = 50_000_000; //SCL 总线时钟采用 400kHz parameter SCL_CLOCK = 400_000; //产生时钟 SCL 计数器最大值 localparam SCL_CNT_M = SYS_CLOCK/SCL_CLOCK; reg [15:0]scl_cnt; //SCL 时钟计数器 reg scl_vaild; //I2C 非空闲时期 reg scl_high; //SCL 时钟高电平中部标志位 reg scl_low; //SCL 时钟低电平中部标志位 //I2C 非空闲时期 scl_vaild 的产生 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) scl_vaild <= 1'b0; else if(Wr | Rd) scl_vaild <= 1'b1; else if(Done) scl_vaild <= 1'b0; else scl_vaild <= scl_vaild; end //scl 时钟计数器 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) scl_cnt <= 16'd0; else if(scl_vaild)begin if(scl_cnt == SCL_CNT_M - 1) scl_cnt <= 16'd0; else scl_cnt <= scl_cnt + 16'd1; end else scl_cnt <= 16'd0; end //scl 时钟,在计数器值到达最大值一半和 0 时翻转 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) Scl <= 1'b1; else if(scl_cnt == SCL_CNT_M >>1) Scl <= 1'b0; else if(scl_cnt == 16'd0) Scl <= 1'b1; else Scl <= Scl; end //scl 时钟高低电平中部标志位 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) scl_high <= 1'b0; else if(scl_cnt == (SCL_CNT_M>>2)) scl_high <= 1'b1; else scl_high <= 1'b0; end //scl 时钟低电平中部标志位 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) scl_low <= 1'b0; else if(scl_cnt == (SCL_CNT_M>>1)+(SCL_CNT_M>>2)) scl_low <= 1'b1; else scl_low <= 1'b0; end上述代码中 Wr 和 Rd 信号为 I2C 进行一次写和读操作的门控使能信号,Done 信号为一次I2C写和读操作完成标志位。(SCL_CNT_M>>2)和(SCL_CNT_M>>1)+(SCL_CNT_M>>2)分别为 1/2 的 SCL_CNT_M 和 3/4 的 SCL_CNT_M 的计数值。 在 SCL 时钟总线以及其高低电平标志位产生完成后,接下来的事情就是 SDA 数据线的产生,这个需要根据具体的读写操作时序完成。本实验主要采用状态机实现,根据上面讲述的读写数据的时序关系,设计了如图 30.16 所示的状态转移图,其状态机状态编码采用独热编码,若需要改变状态编码形式,只需改变程序中的 parameter 定义即可。 图片 根据上面 I2C 基本概念可知,不同的器件其寄存器地址字节数分为 1 字节或和 2 字节地址段,并且有些 I2C 器件是支持多字节的数据读写,所以在设计时考虑到该 I2C 控制器的通用性,我们将设计寄存器地址字节和读取数据个数均可自行设置的 I2C 控制器,用户可根据自己的实际应用情况设置选择与器件对应的寄存器地址字节数或是读写数据的字节数。寄存器地址字节数的可变主要是通过一个计数器对字节数进行计数,当计数值达到指定值后跳转到下一状态,具体的可参见代码。 在状态机中,从主机角度来看,SDA 数据线上在写控制、写数据、读控制状态过程是需要串行输出数据,而在读数据状态过程是需要串行输入数据。根据数据在时钟高电平期间保持不变,改变数据在低电平时期的规则,本设计对时钟信号的高低电平进行计数,从而在指定的计数值进行输出或读取数据实现数据的串行输出和串行输入。串行输出和串行输入数据采用任务的形式进行表示,便于在主状态机中多次的调用。图 30.17为计数的过程以及特定状态变化的时序图,这里的特定状态主要是指读/写控制、读/写地址和读/写数据状态。 图片 图 30.17 中计数器 halfbit_cnt 和数据接收方对发送的响应检测标志位 ack 以及串行输出、输入数据任务的具体代码如下: //sda 串行接收与发送时 scl 高低电平计数器 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) halfbit_cnt <= 8'd0; else if((main_state == WR_CTRL)|| (main_state == WR_WADDR)|| (main_state == WR_DATA)|| (main_state == RD_CTRL)|| (main_state == RD_DATA))begin if(scl_low | scl_high)begin if(halfbit_cnt == 8'd17) halfbit_cnt <= 8'd0; else halfbit_cnt <= halfbit_cnt + 8'd1; end else halfbit_cnt <= halfbit_cnt; end else halfbit_cnt <= 8'd0; end //数据接收方对发送的响应检测标志位 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) ack <= 1'b0; else if((halfbit_cnt == 8'd16)&&scl_high&&(Sda==1'b0)) ack <= 1'b1; else if((halfbit_cnt == 8'd17)&&scl_low) ack <= 1'b0; else ack <= ack; end //输出串行数据任务 task send_8bit_data; if(scl_high && (halfbit_cnt == 8'd16)) FF <= 1; else if(halfbit_cnt < 8'd17)begin sda_reg <= sda_data_out[7]; if(scl_low) sda_data_out <= {sda_data_out[6:0],1'b0}; else sda_data_out <= sda_data_out; end else ; endtask //串行数据输入任务 task receive_8bit_data; if(scl_low && (halfbit_cnt == 8'd15)) FF <= 1; else if((halfbit_cnt < 8'd15))begin if(scl_high) sda_data_in <= {sda_data_in[6:0],Sda}; else begin sda_data_in <= sda_data_in; end end else ; endtask对于计数器 halfbit_cnt 只在写控制、写数据、读控制、读数据状态下才进行计数,其他状态为零。代码中 FF 是进行串行输出或输入任务的标志位,当 FF 为 1 时表示退出任务,FF 为 0 时表示进入任务。这样便于在状态机中对任务的调用,以及在指定的时间退出任务。 接下来就是主状态机的设计,主状态机的状态转移图上面已经给出,具体转移过程是依据 I2C 读写时序进行的,代码如下: //主状态机 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n)begin main_state <= IDLE; sda_reg <= 1'b1; W_flag <= 1'b0; R_flag <= 1'b0; Done <= 1'b0; waddr_cnt <= 2'd1; wdata_cnt <= 8'd1; rdata_cnt <= 8'd1; end else begin case(main_state) IDLE:begin sda_reg <= 1'b1; W_flag <= 1'b0; R_flag <= 1'b0; Done <= 1'b0; waddr_cnt <= 2'd1; wdata_cnt <= 8'd1; rdata_cnt <= 8'd1; if(Wr)begin main_state <= WR_START; W_flag <= 1'b1; end else if(Rd)begin main_state <= WR_START; R_flag <= 1'b1; end else main_state <= IDLE; end WR_START:begin if(scl_low)begin main_state <= WR_CTRL; sda_data_out <= wr_ctrl_word; FF <= 1'b0; end else if(scl_high)begin sda_reg <= 1'b0; main_state <= WR_START; end else main_state <= WR_START; end WR_CTRL:begin if(FF == 1'b0) send_8bit_data; else begin if(ack == 1'b1) begin//收到响应 if(scl_low)begin main_state <= WR_WADDR; FF <= 1'b0; if(Wdaddr_num == 2'b1) sda_data_out <= Word_addr[7:0]; else sda_data_out <= Word_addr[15:8]; end else main_state <= WR_CTRL; end else//未收到响应 main_state <= IDLE; end end WR_WADDR:begin if(FF == 1'b0) send_8bit_data; else begin if(ack == 1'b1) begin//收到响应 if(waddr_cnt == Wdaddr_num)begin if(W_flag && scl_low)begin main_state <= WR_DATA; sda_data_out <= Wr_data; waddr_cnt <= 2'd1; FF <= 1'b0; end else if(R_flag && scl_low)begin main_state <= RD_START; sda_reg <= 1'b1; end else main_state <= WR_WADDR; end else begin if(scl_low)begin waddr_cnt <= waddr_cnt + 2'd1; main_state <= WR_WADDR; sda_data_out <= Word_addr[7:0]; FF <= 1'b0; end else main_state <= WR_WADDR; end end else//未收到响应 main_state <= IDLE; end end WR_DATA:begin if(FF == 1'b0) send_8bit_data; else begin if(ack == 1'b1) begin//收到响应 if(wdata_cnt == Wrdata_num)begin if(scl_low)begin main_state <= STOP; sda_reg <= 1'b0; wdata_cnt <= 8'd1; end else main_state <= WR_DATA; end else begin if(scl_low)begin wdata_cnt <= wdata_cnt + 8'd1; main_state <= WR_DATA; sda_data_out <= Wr_data; FF <= 1'b0; end else main_state <= WR_DATA; end end else//未收到响应 main_state <= IDLE; end end RD_START:begin if(scl_low)begin main_state <= RD_CTRL; sda_data_out <= rd_ctrl_word; FF <= 1'b0; end else if(scl_high)begin main_state <= RD_START; sda_reg <= 1'b0; end else main_state <= RD_START; end RD_CTRL:begin if(FF == 1'b0) send_8bit_data; else begin if(ack == 1'b1) begin//收到响应 if(scl_low)begin main_state <= RD_DATA; FF <= 1'b0; end else main_state <= RD_CTRL; end else//未收到响应 main_state <= IDLE; end end RD_DATA:begin if(FF == 1'b0) receive_8bit_data; else begin if(rdata_cnt == Rddata_num)begin sda_reg <= 1'b1; if(scl_low)begin main_state <= STOP; sda_reg <= 1'b0; end else main_state <= RD_DATA; end else begin sda_reg <= 1'b0; if(scl_low)begin rdata_cnt <= rdata_cnt + 8'd1; main_state <= RD_DATA; FF <= 1'b0; end else main_state <= RD_DATA; end end end STOP:begin//结束操作 if(scl_high)begin sda_reg <= 1'b1; main_state <= IDLE; Done <= 1'b1; end else main_state <= STOP; end default: main_state <= IDLE; endcase end end主状态机完成后,I2C 控制器设计的大块就解决了,剩下的就是 SDA 数据线的输出了,该数据线采用三态使能输出,具体代码如下: assign Sda = sda_en ? sda_reg : 1'bz;对于使能信号 sda_en 按照上面的时序关系图可知,该信号在不同的状态,其高低电平变化的时刻是有差别的,比如在开始和结束状态,它是一直为高电平的,在写控制、写数据、读控制状态,它是在串行输出一字节数据期间(即 halfbit_cnt < 16 时)为高电平,之外的一个数据为位低电平,而在读数据状态时串行输入一字节数据期间(即halfbit_cnt < 16 时)为低电平电平,之外的一个数据位为高电平。具体代码如下: //SDA 三态使能信号 sda_en always@(*) begin case(main_state) IDLE: sda_en = 1'b0; WR_START,RD_START,STOP: sda_en = 1'b1; WR_CTRL,WR_WADDR,WR_DATA,RD_CTRL: if(halfbit_cnt < 16) sda_en = 1'b1; else sda_en = 1'b0; RD_DATA: if(halfbit_cnt < 16) sda_en = 1'b0; else sda_en = 1'b1; default: sda_en = 1'b0; endcase end本实验设计考虑到了多字节数据的读取情况,所以增加了数据读取和数据写入时的 有效标志位信号。主要是标志读取数据时数据有效时刻和写数据时提供待写入数据时刻。 具体代码如下: //写数据有效标志位 assign Wr_data_vaild = ((main_state==WR_WADDR)&& (waddr_cnt==Wdaddr_num)&& (W_flag && scl_low)&& (ack == 1'b1))|| ((main_state == WR_DATA)&& (ack == 1'b1)&&(scl_low)&& (wdata_cnt != Wrdata_num)); //读数据有效标志位前寄存器 assign rdata_vaild_r = (main_state == RD_DATA) &&(halfbit_cnt == 8'd15)&&scl_low; //读出数据有效标志位 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) Rd_data_vaild <= 1'b0; else if(rdata_vaild_r) Rd_data_vaild <= 1'b1; else Rd_data_vaild <= 1'b0; end //读出的有效数据 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) Rd_data <= 8'd0; else if(rdata_vaild_r) Rd_data <= sda_data_in; else Rd_data <= Rd_data; end到目前为止,整个 I2C 控制器的设计就完成了,接下来就进入仿真环节,我们需要EEPROM 的仿真模型进行仿真,这样能更好的检验 I2C 控制器设计的是否存在问题,以便后面进行优化改进。本实验采用的是镁光官网提供的 EEPROM 仿真模型,具体下载网 址 为 http://www.microchip.com/zh/design-centers/memory/serial-eeprom/verilog-ibis-models,我们选择两个具有代表性的模型进行仿真,分别为 1 字节寄存器地址段的 24LC04B 和 2 字节寄存器地址段的 24LC64 仿真模型,利用这两个模型对我们设计的 I2C 控制器进行仿真。如图 30.18 为仿真验证的结构框图。 图片 这里我们对 1 字节寄存器地址段的 24LC04B 和 2 字节寄存器地址段的 24LC64 仿真模型的器件地址{A3,A2,A1}分别设置为 3’b001 和 3’b000,仿真时为了能分别对不同型号的模型进行仿真,在编写的 testbench 文件中采用了申明方法去选择当前使用哪个模型进行仿真,具体代码如下: `timescale 1ns/1ns `define CLK_PERIOD 20 //仿真模型选择 //`define TEST_M24LC64 //24LC64 `define TEST_M24LC04 //24LC04 module I2C_tb; reg Clk; //系统时钟 reg Rst_n; //系统复位信号 reg [15:0] Word_addr; //I2C 器件寄存器地址 reg Wr; //I2C 器件写使能 reg [7:0] Wr_data; //I2C 器件写数据 wire Wr_data_vaild;//I2C 器件写数据有效标志位 reg Rd; //I2C 器件读使能 wire[7:0] Rd_data; //I2C 器件读数据 wire Rd_data_vaild;//I2C 器件读数据有效标志位 wire Scl; //I2C 时钟线 wire Sda; //I2C 数据线 wire Done; //对 I2C 器件读写完成标识位 localparam NUM = 6'd4; //单次读写数据字节数 `ifdef TEST_M24LC64 localparam DevAddr = 3'b000; //I2C 器件的器件地址 localparam WdAr_NUM= 2; //I2C 器件的存储器地址字节数 `elsif TEST_M24LC04 localparam DevAddr = 3'b001; //I2C 器件的器件地址 localparam WdAr_NUM= 1; //I2C 器件的存储器地址字节数 `endif I2C I2C( .Clk(Clk), .Rst_n(Rst_n), .Rddata_num(NUM), .Wrdata_num(NUM), .Wdaddr_num(WdAr_NUM), .Device_addr(DevAddr), .Word_addr(Word_addr), .Wr(Wr), .Wr_data(Wr_data), .Wr_data_vaild(Wr_data_vaild), .Rd(Rd), .Rd_data(Rd_data), .Rd_data_vaild(Rd_data_vaild), .Scl(Scl), .Sda(Sda), .Done(Done) ); `ifdef TEST_M24LC64 M24LC64 M24LC64( .A0(1'b0), .A1(1'b0), .A2(1'b0), .WP(1'b0), .SDA(Sda), .SCL(Scl), .RESET(!Rst_n) ); `elsif TEST_M24LC04 M24LC04B M24LC04( .A0(1'b1), .A1(1'b0), .A2(1'b0), .WP(1'b0), .SDA(Sda), .SCL(Scl), .RESET(!Rst_n) ); `endif //系统时钟产生 initial Clk = 1'b1; always #(`CLK_PERIOD/2)Clk = ~Clk; initial begin Rst_n = 0; Word_addr = 0; Wr = 0; Wr_data = 0; Rd = 0; #(`CLK_PERIOD*200 + 1) Rst_n = 1; #200; `ifdef TEST_M24LC64 //仿真验证 24LC64 模型 //写入 20 组数据 Word_addr = 0; Wr_data = 0; repeat(20)begin Wr = 1'b1; #(`CLK_PERIOD); Wr = 1'b0; repeat(NUM)begin //在写数据有效前给待写入数据 @(posedge Wr_data_vaild) Wr_data = Wr_data + 1; end @(posedge Done); #2000; Word_addr = Word_addr + NUM; end #2000; //读出刚写入的 20 组数据 Word_addr = 0; repeat(20)begin Rd = 1'b1; #(`CLK_PERIOD); Rd = 1'b0; @(posedge Done); #2000; Word_addr = Word_addr + NUM; end `elsif TEST_M24LC04 //仿真验证 24LC04 模型 //写入 20 组数据 Word_addr = 100; Wr_data = 100; repeat(20)begin Wr = 1'b1; #(`CLK_PERIOD); Wr = 1'b0; repeat(NUM)begin //在写数据有效前给待写入数据 @(posedge Wr_data_vaild) Wr_data = Wr_data + 1; end @(posedge Done); #2000; Word_addr = Word_addr + NUM; end #2000; //读出刚写入的 20 组数据 Word_addr = 100; repeat(20)begin Rd = 1'b1; #(`CLK_PERIOD); Rd = 1'b0; @(posedge Done); #2000; Word_addr = Word_addr + NUM; end `endif #5000; $stop; end endmodule在 testbench 文件中,通过对 EEPROM 模型进行 20 写操作,每次写字节数为NUM,然后对 EEPROM 模型在刚写入数据的地址段进行读操作,通过比较读出和写入的数据验证 I2C 控制器设计是否正确。这里分别通过申明选择 TEST_M24LC64 或TEST_M24LC04 来作为当前的仿真模型。如图 30.19 所示为 2 字节地址的 EEPROM模型 24LC64 仿真结果。图 30.20 和图 30.21 分别为型号 24LC64 仿真模型写操作时序和读操作时序放大后的波形图。 图片 图片 同样的方式选择 24LC04 型号 EEPROM 模型进行仿真,如图 30.22 所示为 1 字节地址的 EEPROM 模型 24LC604 仿真结果。图 30.23 和图 30.24 分别为型号24LC604 仿真模型写操作时序和读操作时序放大后的波形图。 图片 通过观察图 30.21 和图 30.24 的时序波形发现,在读操作时序结果中,读出的数据中某些位是高阻态,仔细观察波形可知,高阻态的位置正好是需要输出高电平的位置,这个的原因是 EEPROM 的仿真模型是完全与实际的器件是一样的,对于器件来说,只在输出 0 时将数据线拉低,而在高阻态或本应该为高电平的时刻都是设置为高阻态的,这个在仿真模型的代码中也有体现,具体体现这一点的代码如下: bufif1 (SDA, 1'b0, SDA_DriveEnableDlyd);图片 其中,器件地址包括器件的地址字节数和 3 位的器件地址,具体分配如下: 图片 功能码主要是区分是写数据操作还是读数据操作,为了方便,我们直接规定,功能码为 0xf1 表示写数据操作,0xf2 表示读数据操作;起始地址是我们要读写数据的第一个地址;数据字节数表示要写入或读取的数据的字节个数,后面的数据 1 到数据n 表示要写入的 n 个数据,对于读操作没有这部分。如图 30.25 为该实验整体的设计框图。 图片 有关串口发送和接收以及 fifo 模块在前面章节都已经进行了讲解,这里就不重复讲解了,这里重点讲解命令解析模块的设计,命令解析模块的主要作用是对串口接收的数据进行解析,通过对接收的数据进行解析分析判断出是进行何种操作。根据我们自己规定的数据协议,进行如下的设计,首先我们将串口发送的数据的前 4 个数据存入一个缓冲区数据内,通过对功能码识别判断是写操作还是读操作,如果是写操作,就将后面待写入的数据存入 fifo 中;同时将器件地址、地址字节数、起始地址、数据字节数赋值给 I2C 对应的信号线;如果是读操作,就在前 4 个字节接收完成后将器件地址、地址字节数、起始 地址、数据字节数赋值给 I2C 对应的信号线,同时给 I2C 控制器模块的读使能给一个时钟周期的门控信号,使能 I2C 的读操作。读出的数据同样也是先存放在另外一个 fifo 中,然后送给串口发送模块发出。具体实现代码如下: module cmd_analysis( Clk, Rst_n, Rx_done, Rx_data, Wfifo_req, Wfifo_data, Rddata_num, Wrdata_num, Wdaddr_num, Device_addr, Word_addr, Rd ); input Clk; //系统时钟 input Rst_n; //系统复位 input Rx_done; //串口接收一字节数据完成 input[7:0] Rx_data; //串口接收一字节数据 output reg Wfifo_req; //写 fifo 请求信号 output reg[7:0] Wfifo_data; //写 fifo 数据 output reg[5:0] Rddata_num; //I2C 总线连续读取数据字节数 output reg[5:0] Wrdata_num; //I2C 总线连续读取数据字节数 output reg[1:0] Wdaddr_num; //I2C 器件数据地址字节数 output reg[2:0] Device_addr; //EEPROM 器件地址 output reg[15:0] Word_addr; //EEPROM 寄存器地址 output reg Rd; //EEPROM 读请求信号 reg [7:0] buff_data[4:0];//串口接收数据缓存器 //串口接收数据计数器 reg [7:0]byte_cnt; always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) byte_cnt <= 8'd0; else if(Rx_done && byte_cnt==8'd4)begin if(buff_data[1]==8'hf2) //读数据指令 byte_cnt <= 8'd0; else if(buff_data[1]==8'hf1) //写数据指令 byte_cnt <= byte_cnt + 8'd1; else byte_cnt <= 8'd0; //错误指令 end else if(Rx_done)begin if(byte_cnt == 8'd4 + buff_data[4]) byte_cnt <= 8'd0; else byte_cnt <= byte_cnt + 8'd1; end else byte_cnt <= byte_cnt; end //串口接收数据缓存器 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n)begin buff_data[0] <= 8'h00; buff_data[1] <= 8'h00; buff_data[2] <= 8'h00; buff_data[3] <= 8'h00; buff_data[4] <= 8'h00; end else if(Rx_done && byte_cnt<5) buff_data[byte_cnt] <= Rx_data; else ; end //写 fifo 请求信号 Wfifo_req always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) Wfifo_req <= 1'b0; else if(byte_cnt >8'd4 && Rx_done) Wfifo_req <= 1'b1; else Wfifo_req <= 1'b0; end //写 fifo 数据 Wfifo_data always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) Wfifo_data <= 8'd0; else if(byte_cnt > 8'd4 && Rx_done) Wfifo_data <= Rx_data; else Wfifo_data <= Wfifo_data; end //EEPROM 读请求信号 Rd always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) Rd <= 1'b0; else if(byte_cnt == 8'd4 && Rx_done && buff_data[1]==8'hf2) Rd <= 1'b1; else Rd <= 1'b0; end //指令完成标志位 reg cmd_flag; always@(posedge Clk or negedge Rst_n) begin if(!Rst_n) cmd_flag <= 1'b0; else if((byte_cnt == 8'd4)&& Rx_done) cmd_flag <= 1'b1; else cmd_flag <= 1'b0; end //EEPROM 读写数据、寄存器地址字节数,器件地址,寄存器地址 always@(posedge Clk or negedge Rst_n) begin if(!Rst_n)begin Rddata_num <= 6'd0; Wrdata_num <= 6'd0; Wdaddr_num <= 2'd0; Device_addr <= 3'd0; Word_addr <= 16'd0; end else if(cmd_flag == 1'b1)begin Rddata_num <= buff_data[4][5:0]; Wrdata_num <= buff_data[4][5:0]; Wdaddr_num <= buff_data[0][5:4]; Device_addr <= buff_data[0][2:0]; Word_addr <= {buff_data[2],buff_data[3]}; end else ; end endmodule下面编写 testbench 测试文件对设计的命令解析模块进行仿真验证,该仿真主要是分别模拟发送写数据操作和读数据操作指令,来观察相应的输出时序波形结果。通过仿真时序结果可以对该模块进行优化改进,具体的 testbench 文件如下: `timescale 1ns/1ns `define CLK_PERIOD 20 module cmd_analysis_tb; reg Clk; reg Rst_n; reg Rx_done; reg [7:0] Rx_data; wire Wfifo_req; wire[7:0] Wfifo_data; wire[5:0] Rddata_num; wire[5:0] Wrdata_num; wire[1:0] Wdaddr_num; wire[2:0] Device_addr; wire[15:0] Word_addr; wire Rd; reg [15:0] addr; reg [7:0] data_num; reg [7:0] wr_data; reg [39:0] wdata_cmd; reg [39:0] rdata_cmd; cmd_analysis cmd_analysis( .Clk(Clk), .Rst_n(Rst_n), .Rx_done(Rx_done), .Rx_data(Rx_data), .Wfifo_req(Wfifo_req), .Wfifo_data(Wfifo_data), .Rddata_num(Rddata_num), .Wrdata_num(Wrdata_num), .Wdaddr_num(Wdaddr_num), .Device_addr(Device_addr), .Word_addr(Word_addr), .Rd(Rd) ); //写 FIFO 模块例化 fifo_wr wr( .clock(Clk), .data(Wfifo_data), .rdreq(), .wrreq(Wfifo_req), .empty(), .full(), .q(), .usedw() ); //系统时钟产生 initial Clk = 1'b1; always #(`CLK_PERIOD/2)Clk = ~Clk; initial begin Rst_n = 0; Rx_done = 0; Rx_data = 0; addr = 0; data_num = 0; wr_data = 0; wdata_cmd = 0; rdata_cmd = 0; #(`CLK_PERIOD*200 + 1) Rst_n = 1; #200; addr = 0; data_num = 4; wr_data = 0; send_uart_data_wr; //写数据 #500; send_uart_data_rd; //读数据 #500; addr = 4; data_num = 8; wr_data = 20; send_uart_data_wr; //写数据 #500; send_uart_data_rd; //读数据 #500; $stop; end //串口发送写数据命令和待写入数据任务 task send_uart_data_wr; begin //写数据指令 wdata_cmd = {8'h21,8'hf1,addr[15:8],addr[7:0],data_num}; //发送写数据指令 repeat(5)begin Rx_done = 1; Rx_data = wdata_cmd[39:32]; #(`CLK_PERIOD) Rx_done = 0; #500; wdata_cmd = {wdata_cmd[31:0],8'h00}; end //待写入数据 Rx_data = wr_data; repeat(data_num)begin Rx_done = 1; Rx_data = Rx_data + 1; #(`CLK_PERIOD) Rx_done = 0; #500; end end endtask //串口发送读数据命令任务 task send_uart_data_rd; begin //读数据指令 rdata_cmd = {8'h21,8'hf2,addr[15:8],addr[7:0],data_num}; //发送读数据指令 repeat(5)begin Rx_done = 1; Rx_data = rdata_cmd[39:32]; #(`CLK_PERIOD) Rx_done = 0; #500; rdata_cmd = {rdata_cmd[31:0],8'h00}; end end endtask endmodule仿真过程主要是模拟命令解析模块接收到写或读 EEPROM 操作指令后的操作是否和我们设计想要达到的目标是否一致。这里的写或读数据指令均采用任务的形式,写数据指令下待写入的数据是采用给定一个值的基础上递增进行赋值的。命令解析模块仿真的结果如图 30.26 所示。 图片 根据波形时序图,在模拟发送写操作命令 0x21,0xf1,0x00,0x00,0x04,0x06,0x07,0x08,0x09 时,在接收完数据字节数这个数据后,后面收到的数据就存入到 fifo 中去了,与我们设计的是一致的,同理可以分析读数据操作命令,也是没有问题的,这样命令解析模块就设计完成了。 下面就是整个系统的设计,如图 30.25 整体设计框图中,在 I2C 写数据操作之前和读数据后分别加入了 fifo 模块,因为串口读写速度和 I2C 读写速度不一样,在这之间加入的 fifo 模块具有读写时钟不一致的特点,可以对数据进行一个缓存,这样就能解决前后速度不一样的问题,这里的两个 fifo 均设置的是读取数据在读请求前有效,这样设计的目的是为了与其他模块待输入数据与使能信号相匹配,里面的 fifo模块都是通过 QuartusII 软件生成的 IP 核,fifo 输入输出数据位宽均设置为 8位,深度设置为 64(多字节读取最多支持 32 字节,稍大于这个数就可以了)。在各模块均设计完成后,整个系统的顶层电路设计就显得比较简单了,根据设计的系统框图进行整合就可以了。整个系统设计的代码如下: module uart_eeprom( Clk, Rst_n, Uart_rx, Uart_tx, Sda, Scl ); parameter Baud_set = 3'd4;//波特率设置,这里设置为 115200 input Clk; //系统时钟 input Rst_n; //系统复位 input Uart_rx; //串口接收 output Uart_tx; //串口发送 inout Sda; //I2C 时钟线 output Scl; //I2C 数据线 wire [7:0] Rx_data; //串口接收一字节数据 wire Rx_done; //串口接收一字节数据完成 wire wfifo_req; //写 FIFO 模块写请求 wire [7:0] wfifo_data; //写 FIFO 模块写数据 wire [5:0] wfifo_usedw; //写 FIFO 模块已写数据量 wire [5:0] rfifo_usedw; //读 FIFO 模块可读数据量 wire rfifo_rdreq; //读 FIFO 模块读请求 wire [5:0] Rddata_num; //I2C 总线连续读取数据字节数 wire [5:0] Wrdata_num; //I2C 总线连续写取数据字节数 wire [1:0] Wdaddr_num; //EEPROM 数据地址字节数 wire [2:0] Device_addr; //EEPROM 地址 wire [15:0] Word_addr; //EEPROM 寄存器地址 wire Wr; //EEPROM 写使能 wire [7:0] Wr_data; //EEPROM 写数据 wire Wr_data_vaild;//EEPROM 写数据有效标志位 wire Rd; //EEPROM 读使能 wire [7:0] Rd_data; //EEPROM 读数据 wire Rd_data_vaild;//EEPROM 读数据有效标志位 wire Done; //EEPRO 读写完成标识位 wire tx_en; //串口发送使能 wire [7:0] tx_data; //串口待发送数据 wire tx_done ; //一次串口发送完成标志位 //串口接收模块例化 uart_byte_rx uart_rx( .Clk(Clk), .Rst_n(Rst_n), .Rs232_rx(Uart_rx), .baud_set(Baud_set), .Data_Byte(Rx_data), .Rx_Done(Rx_done) ); //指令解析模块例化 cmd_analysis cmd_analysis( .Clk(Clk), .Rst_n(Rst_n), .Rx_done(Rx_done), .Rx_data(Rx_data), .Wfifo_req(wfifo_req), .Wfifo_data(wfifo_data), .Rddata_num(Rddata_num), .Wrdata_num(Wrdata_num), .Wdaddr_num(Wdaddr_num), .Device_addr(Device_addr), .Word_addr(Word_addr), .Rd(Rd) ); //写缓存 fifo 模块例化 fifo_wr fifo_wr( .clock(Clk), .data(wfifo_data), .rdreq(Wr_data_vaild), .wrreq(wfifo_req), .empty(), .full(), .q(Wr_data), .usedw(wfifo_usedw) ); //EEPROM 写使能 assign Wr = (wfifo_usedw == Wrdata_num)&& (wfifo_usedw != 6'd0); //I2C 控制模块例化 I2C I2C( .Clk(Clk), .Rst_n(Rst_n), .Rddata_num(Rddata_num), .Wrdata_num(Wrdata_num), .Wdaddr_num(Wdaddr_num), .Device_addr(Device_addr), .Word_addr(Word_addr), .Wr(Wr), .Wr_data(Wr_data), .Wr_data_vaild(Wr_data_vaild), .Rd(Rd), .Rd_data(Rd_data), .Rd_data_vaild(Rd_data_vaild), .Scl(Scl), .Sda(Sda), .Done(Done) ); //读缓存 fifo 模块例化 fifo_rd fifo_rd( .clock(Clk), .data(Rd_data), .rdreq(rfifo_rdreq), .wrreq(Rd_data_vaild), .empty(), .full(), .q(tx_data), .usedw(rfifo_usedw) ); //串口发送使能 assign tx_en = ((rfifo_usedw == Rddata_num)&&Done)|| ((rfifo_usedw < Rddata_num)&& (rfifo_usedw >0)&&tx_done); //读 FIFO 模块读请求 assign rfifo_rdreq = tx_en; //串口发送模块例化 uart_byte_tx uart_tx( .Clk(Clk), .Rst_n(Rst_n), .send_en(tx_en), .baud_set(Baud_set), .Data_Byte(tx_data), .Rs232_Tx(Uart_tx), .Tx_Done(tx_done), .uart_state() ); endmodule下面对设计的整个系统进行编写 testbench 文件来仿真验证,整个仿真主要是通过串口发送模块模拟对该系统发送指令进行仿真验证,这里就只选用 M24LC64 这个仿真模型进行仿真,M24LC04 的仿真模型类似(读者可尝试对该模型进行仿真),编写的 testbench 文件具体代码如下: `timescale 1ns/1ns `define CLK_PERIOD 20 module uart_eeprom_tb; reg Clk; reg Rst_n; reg tx_en; reg [7:0] tx_data; wire tx_done; wire Uart_rx; wire Uart_tx; wire Sda; wire Scl; reg [15:0] addr; reg [7:0] data_num; reg [7:0] wr_data; reg [39:0] wdata_cmd; reg [39:0] rdata_cmd; localparam Baud_set = 3'd4; //波特率设置,这里设置为 115200 localparam DevAddr = 3'b000;//I2C 器件的器件地址 localparam WdAr_NUM = 2'd2; //I2C 器件的存储器地址字节数 //串口发送模块例化 uart_byte_tx uart_tx( .Clk(Clk), .Rst_n(Rst_n), .send_en(tx_en), .baud_set(Baud_set), .Data_Byte(tx_data), .Rs232_Tx(Uart_rx), .Tx_Done(tx_done), .uart_state() ); //串口读写 EEPROM 模块例化 uart_eeprom #(.Baud_set(Baud_set)) uart_eeprom( .Clk(Clk), .Rst_n(Rst_n), .Uart_rx(Uart_rx), .Uart_tx(Uart_tx), .Sda(Sda), .Scl(Scl) ); //EEPROM 模型例化 M24LC64 M24LC64( .A0(1'b0), .A1(1'b0), .A2(1'b0), .WP(1'b0), .SDA(Sda), .SCL(Scl), .RESET(!Rst_n) ); //系统时钟产生 initial Clk = 1'b1; always #(`CLK_PERIOD/2)Clk = ~Clk; initial begin Rst_n = 0; tx_data = 0; tx_en = 0; addr = 0; data_num = 0; wr_data = 0; wdata_cmd = 0; rdata_cmd = 0; #(`CLK_PERIOD*200 + 1) Rst_n = 1; #200; addr = 0; data_num = 4; wr_data = 0; send_uart_data_wr;//写数据 @(posedge uart_eeprom.I2C.Done); #500; send_uart_data_rd;//读数据 @(posedge uart_eeprom.I2C.Done); #500; addr = 4; data_num = 8; wr_data = 20; send_uart_data_wr;//写数据 @(posedge uart_eeprom.I2C.Done); #500; send_uart_data_rd;//读数据 @(posedge uart_eeprom.I2C.Done); //从 EEPROM 读出的数据串口发送出去,等待发送完成 repeat(data_num)begin @(posedge uart_eeprom.tx_done); end #5000; $stop; end //串口发送写数据命令和待写入数据任务 task send_uart_data_wr; begin //写数据指令 wdata_cmd = {{2'b00,WdAr_NUM,1'b0,DevAddr},8'hf1, addr[15:8],addr[7:0],data_num}; //发送写数据指令 repeat(5)begin tx_en = 1; tx_data = wdata_cmd[39:32]; #(`CLK_PERIOD) tx_en = 0; @(posedge tx_done) #100; wdata_cmd = {wdata_cmd[31:0],8'h00}; end //待写入数据 tx_data = wr_data; repeat(data_num)begin tx_en = 1; tx_data = tx_data + 1; #(`CLK_PERIOD) tx_en = 0; @(posedge tx_done) #100; end end endtask //串口发送读数据命令任务 task send_uart_data_rd; begin //读数据指令 rdata_cmd = {{2'b00,WdAr_NUM,1'b0,DevAddr},8'hf2, addr[15:8],addr[7:0],data_num}; //发送读数据指令 repeat(5)begin tx_en = 1; tx_data = rdata_cmd[39:32]; #(`CLK_PERIOD) tx_en = 0; @(posedge tx_done) #100; rdata_cmd = {rdata_cmd[31:0],8'h00}; end end endtask endmodule仿真过程主要是通过串口发送模块模拟对该系统发送读写指令进行仿真验证,分别进行了 2 次写和读指令的发送,读指令主要是对刚写入地址的数据进行读出,我们可以通过观察时序波形图,比较写入数据与读出数据是否一致来验证系统设计的正确性。如图 30.27 为系统仿真波形时序图。 图片 分别对一次写数据指令和一次读数据指令的波形进行放大后观察分析,如图 30.28 和图30.29 分别为一次对 EEPROM 写数据过程和读数据过程的波形时序图。 图片 这次写数据过程的仿真是通过串口发送模块模拟发送指令数据 0x21,0xf1,0x00,0x00,0x04,0x05,0x06,0x07,0x08,向 EEPROM 中起始地址为 0 开始写入 0x05,0x06,0x07,0x08 四个数据,可以通过观察图 30.28 的中 SDA 和 SCL 波形图分析得知,写入的数据确实是这四个数据,说明系统中串口写 EEPROM 部分是没有问题的。 读数据过程的仿真是通过串口发送模块模拟发送指令数据 0x21,0xf2,0x00,0x00,0x04,向 EEPROM 中起始地址为 0 开始读出四个数据,通过观察图 30.29 的中 SDA和 SCL 波形图分析得知,读出的四个数据为 0x05,0x06,0x07,0x08,与之前在这些地址写入的数据是一致的,说明这次的读数据时没有问题的,同样的方式经过多次的验证,串口读写 EEPROM 系统是可以正常工作的。仿真验证进行完成后,接下来就是进行板级验证,先是引脚的分配,本实验板级验证平台是 AC620 开发板,根据开发板的引脚分配表对本实验所用引脚进行分配。如图 30.30 是 AC620 开发板上 EEPROM 部分的硬件原理图,在引脚分配之前,是需要对这一块硬件电路有所了解的。 图片 细心的读者会发现,I2C 时钟线 SCL 和 I2C 数据线没有进行硬件上拉处理,与前面讲解的需要上拉处理不一样,可能会猜想是硬件设计的问题。这里我说明一下,硬件设计是没有问题的,因为对于 FPGA 是可以通过软件对引脚进行上拉处理的,这个也是本实验包含的一个知识点。通过 Quartus II 软件将管脚设置为上拉电阻(弱上拉)的方法,具体的步骤如下: 1.在菜单 Assignments 中选择 Pin Planner,也可以直接点击面板上引脚分配的图标 图片 2.这样进入引脚分配的界面,在弹出的 Pin Planner 界面的 All Pins 区域里点击鼠标右键,找到 Customize Columns。 图片 在弹出的 Customize Columns 对 话 框的 左 列表 框 选 择 Weak Pull-Up Resistor,再点击,把 Weak Pull-Up Resistor 添加到右列表框,这样在 Pin Planner 的 All Pins 区域里就有一列 Weak Pull-Up Resistor 的设置项。 图片 再把需要上拉的 SDA 和 SCL 在其对应的 Weak Pull-Up Resistor 列的位置双极鼠标左键,就会弹出一个 Off/On 的选项,选上 On 就可以了。最后完成后的设置如下: 图片 引脚分配和上拉设置完成后,对我们设计的系统顶层文件进行综合布局布线生成 sof 下载文件,然后下载到 AC620 实验平台进行板级验证。板级验证需要用到串口软件工具, 这里使用的是名叫格西烽火的串口工具,选择对应的开发板的串口号和波特率,系统设计的波特率在顶层文件 uart_eeprom 中可进行设置,这里我们设置的波特率为115200bps。 板级验证时,我们先往 EEPROM 里写入一些数据,也就是在串口发送 6 组数据,每组数据写入四个数据;写完后发送读数据命令,读出写入的数据,分两次读,一次读 20个数据,一次读 4 个数据,具体的发送读写指令操作和串口接收的数据如下图: 图片 从串口发送和接受的数据分析可得,从 EEPROM 读出的 20 个数据和写入的 20 个数据是一样的,这就说明,设计的整个系统是工作正常的,读者可以多次进行多组测试来验证设计的完整性,整个的测试还可以利用 Quartus II 软件中的 SignalTap II Logic Analyzer 工具对 SDA 和 SCL 的波形进行抓取分析系统设计的正确性,这里就不详细的说明了,读者可以自己进行尝试。整个串口读写 EEPROM 的系统设计就算完成了,里面还有很多需要完善的地方,读者可以在学习完成后,对本实验进行改进和拓展。 本节小结 本节主要从二线制 I2C 协议的基本知识和概念、 I2C 器件之间数据通信过程,比较全面的了解了 I2C 协议,并以此设计一个可进行读写操作的 I2C 控制器,结合前面设计的串口收发模块和 FIFO 模块设计了一个简易应用,实现了串口对 EEPROM 存储器的读写功能,并进行相应的板级验证。读者可以在此基础上进行一定的优化和拓展,AC620实验开发板上还有音频模块和时钟模块挂在在 I2C 总线上,读者可以利用这些模块实现更丰富的应用
FPGA&ASIC
# ASIC/FPGA
# 小实验
刘航宇
3年前
0
1,890
6
2022-12-31
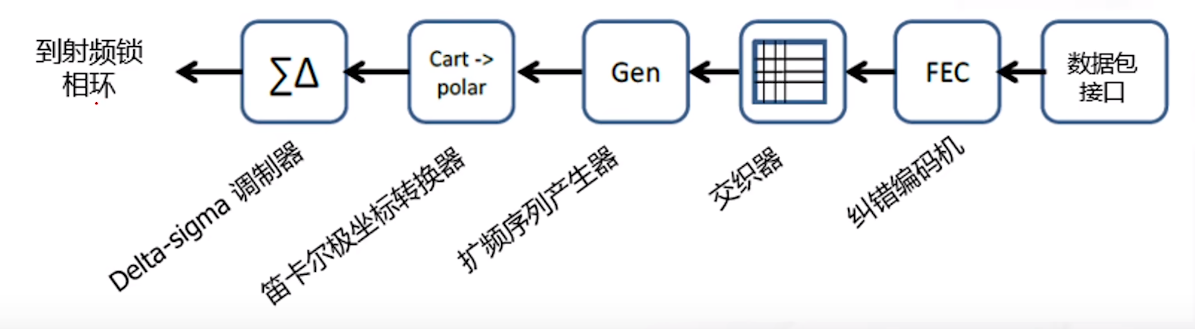
LoRa码元调制、编码与解调
LoRa调制链路 ●LoRa调制链路由五部分组成,分别是纠错编码机、交织器、扩频序列产生器、笛卡 尔极坐标转换器、Delta-sigma调制器。 image.png图片 纠错编码器 ●当一组数据(用户的有效载荷(Payload) )被推入数据包接口( Packet Interface)时,调制过程开始。调制器通过纠错编码机将前向纠错编码(ForwardErrorCorrection,FEC)添加到这些字节中。 ●这些有效载荷数据每个字节首先分成半字节(4比特一组)。然后,根据编码速率配置, 在1到4冗余纠错位之间选择并追加到每个半字节。调制器编码速率通过CR寄存器进行设置,表3-1为前向纠错编码配置表。 image.png图片 交织器 ●纠错编码后,产生的(4+CR)位比特段,随后被存储到交织器的存储阵列中。交织器(Interleaver) 有(4+CR)列和SF行。一旦交织器满了,它的内容将编码到码元上。每个码元都带有SF位。因此,交织器内有(4+CR) *SF 比特,独立于扩频因子SF被编码到4+CR码元上。 ●这里举一一个例子让读者理解交织器。假设此时CR=1,,, SF=7, 其交织器为7行、5列。需要传输的数据流为:00000001001000110100010101100111。先将这些比特流分为4b一组(b1,b2,b3,b4) : 0000; 0001; 0010; 0011; 0100;0101; 0110; 0111; 对上述数据增加1比特校验位(b1,b2,b3,b4,C) 后为: 00000; 00011; 00101; 00110; 01001;01010; 01100; 01111; 再将,上述数字填入交织器的存储列阵中,当35b数据进入交织器的存储列阵后,交织器存储满了,下一组数据(b1,b2,b3,b3,C) 需要填入下一个交织器中。 image.png图片 扩频序列产生器 image.png图片 门坐标转换、Delta-sigma调制输出 image.png图片 解调 image.png图片 编码 下是一个SF=7的LoRa调制编码图, 从图中可以看出码元、码片、比特速率、载荷数据之间的关系。 图中SF=7, 所以发送信号带宽切分为128(27-128)个频率段的码片。假设该系统工作频率为470MHz,BW=250kHz,相邻码片间隔为250kHz/128=1 .95kHz,此时f0=470MHz,f1=470.00195MHz,f2=470.0039MHz,.. .f127=470.24805MHz. 图3-9中有三个时间长度分别是码片率(Chip rate),比特速率(Data rate),码元率(Symbol rate),可以清楚地看出它们的对应关系. 图片 解释一下:如果要发送f64,就在f64频率出加到f127,然后再从f0加到f64 不同的SF对应带宽BW除以时间的斜率,SF越大倾斜角度越小。SF和BW对应一种LoRa调制方式,只有接收机也采用对应的SF和BW才能正常解调,否则信号在相干解 调中会淹没在噪声中。在实际的相干解调中,LoRa调制在不同的SF信号或不同的BW下都是正交的,频带可以充分利用。比如在BW=125kHz的同频段内,一个SF=7信号 Psez和一个SF=8信号Psps都在发射,频段内的噪声为N,,当两个信号都满足解调信噪比要求时(SNRsf7 >=-7.5dB; SNRsf8>=-10dB) ,两个信号都可以正常解调。这里需要注意,当计算SNRsf7时,SF=8的信号表现为此系统噪声,SNRsF7= Psp/(N0+Psf8) ; 同理当计算SNRsf8时,SF=7的信号表现为此系统噪声,SNRsf8=Psf8/(N0+Psf7). 图片
通信&信息处理
# 信号处理
刘航宇
4年前
0
1,213
1
2022-12-25
【FPGA】【SPI】线性序列机与串行接口 ADC 驱动设计与验证
本章导读 模数转换器即 A/D 转换器,或简称 ADC(Analog to Digital Conver),通常是指一个将模拟信号转变为数字信号的电子元件。通常的模数转换器是把经过与标准量比较处理后的模拟量转换成以二进制数值表示的离散信号的转换器。 模数转换器的种类很多,按工作原理的不同,可分成间接 ADC 和直接 ADC。间接 ADC是先将输入模拟电压转换成时间或频率,然后再把这些中间量转换成数字量,常用的有双积分型 ADC。直接 ADC 则直接转换成数字量,常用的有并联比较型 ADC 和逐次逼近型 ADC。 并联比较型 ADC:采用各量级同时并行比较,各位输出码也是同时并行产生,所以转换速度快。并联比较型 ADC 的缺点是成本高、功耗大。 逐次逼近型 ADC:它产生一系列比较电压 VR,但它是逐个产生比较电压,逐次与输入电压分别比较,以逐渐逼近的方式进行模数转换。它比并联比较型 ADC 的转换速度慢,比双分积型 ADC 要快得多,属于中速 ADC 器件。 双积分型 ADC:它先对输入采样电压和基准电压进行两次积分,获得与采样电压平均值成正比的时间间隔,同时用计数器对标准时钟脉冲计数。它的优点是抗干扰能力强,稳定性好;主要缺点是转换速度低。 本节以 ADC128S022 为例介绍 ADC 的工作原理及时序图解释,并用线性序列机来描述时序图进而正确驱动此类设备。本实验中,直接使用 AD/DA 模块上的 DAC 模块的输出直接接到 ADC 模块的输入上,通过控制 DAC 输出不同电压值,然后比较 DAC 的输出与 ADC采样到的值的大小,来评估 ADC 驱动的正确性。 ADC 芯片概述及电路设计 ADC128S022 型 ADC 内部工作原理 在 AC620 开发板上使用的模数转换器为逐次逼近型的低功耗芯片 ADC128S022,其具有 8 通道以及 12 位的分辨率。电源采用独立的模拟供电以及数字供电,其中模拟电源 VA输入范围为 2.7V~5.25V,数字电源 VD 输入范围为 2.7V~VA。其与外部通信支持多种接口如:SPI、QSPI、MICROWIRE 以及通用的 DSP 接口。转换速度在 50kps~200kps,典型情况下当3V 供电时功耗为 1.2mW,5V 供电时为 7.5mW。 图片 本款 ADC 为 12 位分辨率,因此 1bit 代表的电压值即为 VA/4096。手册中同时指出,当模拟输入电压低于 VA/8192 时,输出数据即为 0000_0000_0000b。同理由于芯片本身内部构造当输出数 0000_0000_0000b 变为 0000_0000_0001b 时,实际输入电压变化为 VA/8192 而不是 VA/4096。当输入电压大于等于 VA-1.5* VA/4096,输出数据即为 1111_1111_1111b。 ADC128S022 型 ADC 芯片引脚功能 ADC128S022 芯片引脚及功能描述如表 25.1 所示。 图片 ADC128S022 电路设计 ADC128S022 部分电路图如图 25.2 所示。这里外接了一个抗混叠低通滤波器,其作用是为了避免输入信号的高频成分在 ADC 的基带中引起混叠。数字电源与模拟电源电压均为3.3V,且数字电源与模拟电源之间串联磁珠用于抑制电磁干扰。 图片 传输特性 图片 ADC128S022 型 ADC 接口时序 微控制器与 ADC128S022 的接口如图 25.3 所示,该接口使用标准的 SPI 接口,因此可以直接连接到微控制器的片上 SPI。对于 FPGA 来说,则可以使用逻辑按照 SPI 时序搭建控制电路,以实现对 ADC128S022 的控制。 图片 ADC128S022 通过 SPI 接口与控制器进行通信的时序图如图 所示。一个串行帧开始于CS̅̅̅的下降沿,结束于CS̅̅̅的上升沿。一帧包含 16 个上升沿 SCLK。ADC 的 DOUT 引脚当CS̅̅̅为高时代表空闲状态,当为低时为传输状态。也就是相当于CS̅̅̅可以充当输出使能。在CS̅̅̅为高时 SCLK 默认高。在头三个 SCLK 的循环,ADC 处于采样模式(track)。在接下来的 13 个循环为保持模式(hold),转换完成并且完成数据输出。下降沿 1~4 为前导零,5~16 为输出转换结果。如果在持续测量模式中,ADC 在 N(16) 个 SCLK 的上升沿会自动进去采样模式,在N16+4 个下降沿进入保持/转换模式。 图片 图片 进入采样模式有三种方式,第一种当 SCLK 为高电平时 CS 变为低,当 SCLK 第一个下降沿到来时便进入采样模式,如时序图所示;第二种当 SCLK 为低电平时CS变低,自动进入采样模式,CS的下降沿即视为 SCLK 的第一个下降沿;第三种 SCLK 与CS一同变为低,这样对于两信号上升沿没有时序约束,但对于其下降沿有要求。 在 DIN 的 8 个控制寄存器,每一位代表的含义如表 25.2 所示。 图片 其中 ADD[2:0]代表的输入通道选择如表 25.3 所示。 图片 图片 ADC128S022 接口时序设计 经查阅手册可知器件工作频率 SCLK 推荐范围为 0.8~3.2MHz,这里定义其工作频率为1.92MHz(周期为 520ns)。设置一个两倍于 SCLK 的采样时钟 SCLK2X,使用 50M 系统时钟十三分频而来即 SCLK2X 为 3.84MHz。针对 SCLK2X 进行计数来确定图 25.4 中各个信号的状态。结合前面 ADC 的接口时序图,按照线性序列机的设计思路,可以整理得到每个信号发生变化时对应的时刻以及此时对应的计数器的值。表25.4为依照线性序列机的设计思想, 整理得到的每个信号发生变化时对应的时刻以及此时对应的计数器的值。其中 CS_N 为芯片 状态标志信号,SCLK 为芯片时钟输入脚,DIN 为芯片串行数据输入,DOUT 为芯片串行数据输出。 图片 图片 线性序列机计数器的控制逻辑判断依据,如表 4.17.6 所示。 图片 以上就是通过线性序列机设计接口时序的一个典型案例,可以看到,线性序列机可以大大简化设计思路。线性序列机的设计思想就是使用一个计数器不断计数,由于每个计数值都会对应一个时间,那么当该时间符合需要操作信号的时刻时,就对该信号进行操作。这样,就能够轻松的设计出各种时序接口了。 基于线性序列机的 ADC 驱动设计 模块接口设计 ADC128S022 接口逻辑模块图如图 25.5 所示。 图片 每个端口功能描述如表 25.5 所示。 图片 图片 在每次使能转换的时候,寄存当前状态通道选择 Channel 的值,防止在转换过程中该值发生变化对转换过程产生影响。 reg [2:0]r_Channel; //通道选择内部寄存器 always@(posedge Clk or negedge Rst_n) if(!Rst_n) r_Channel <= 3'd0; else if(En_Conv) r_Channel <= Channel; else r_Channel <= r_Channel;生成使能信号,当输入使能信号有效后便将使能信号 en 置 1,当转换完成信号有效时便将其重新置 0。 reg en; //转换使能信号 always@(posedge Clk or negedge Rst_n) if(!Rst_n) en <= 1'b0; else if(En_Conv) en <= 1'b1; else if(Conv_Done) en <= 1'b0; else en <= en;在数据手册中SCLK的频率范围为0.8~3.2MHz。这里为了方便适配不同的频率需求率,设置了一个可调的计数器。根据表中可以看出,需要根据计数器的值周期性的产生 SCLK时钟信号,这里可以将计数器的值等倍数放大,形成过采样。这里产生一个两倍于 SCLK 的信号,命名为 SCLK2X。 首先编写分频计数器,时钟 SCLK2X 的计数器。 reg [7:0]DIV_CNT;//分频计数器 always@(posedge Clk or negedge Rst_n) if(!Rst_n) DIV_CNT <= 8'd0; else if(en)begin if(DIV_CNT == (DIV_PARAM - 1'b1)) //时钟分频设置 DIV_CNT <= 8'd0; else DIV_CNT <= DIV_CNT + 1'b1; end else DIV_CNT <= 8'd0;根据使能信号以及计数器状态生成 SCLK2X 时钟。 always@(posedge Clk or negedge Rst_n) if(!Rst_n) SCLK2X <= 1'b0; else if(en && (DIV_CNT == (DIV_PARAM - 1'b1))) SCLK2X <= 1'b1; else SCLK2X <= 1'b0;每当使能转换后,对 SCLK2X 时钟进行计数。 always@(posedge Clk or negedge Rst_n) if(!Rst_n) SCLK_GEN_CNT <= 6'd0; else if(SCLK2X && en)begin if(SCLK_GEN_CNT == 6'd33) SCLK_GEN_CNT <= 6'd0; else SCLK_GEN_CNT <= SCLK_GEN_CNT + 1'd1; end else SCLK_GEN_CNT <= SCLK_GEN_CNT;根据 SCLK2X 计数器的值来确认工作状态以及数据传输进程。 reg [11:0]r_data; //转换结果读取内部寄存器 reg [5:0]SCLK_GEN_CNT;//SCLK2X 计数器 always@(posedge Clk or negedge Rst_n) if(!Rst_n)begin SCLK <= 1'b1;CS_N <= 1'b1;DIN <= 1'b1; end else if(en) begin if(SCLK2X)begin case(SCLK_GEN_CNT) 6'd0:begin CS_N <= 1'b0; end 6'd1:begin SCLK <= 1'b0; DIN <= 1'b0; end 6'd2:begin SCLK <= 1'b1; end 6'd3:begin SCLK <= 1'b0; end 6'd4:begin SCLK <= 1'b1; end 6'd5:begin SCLK <= 1'b0; DIN <= r_Channel[2];end 6'd6:begin SCLK <= 1'b1; end 6'd7:begin SCLK <= 1'b0; DIN <= r_Channel[1];end 6'd8:begin SCLK <= 1'b1; end 6'd9:begin SCLK <= 1'b0; DIN <= r_Channel[0];end 6'd10,6'd12,6'd14,6'd16,6'd18,6'd20,6'd22,6'd24,6'd26,6'd28,6'd 30,6'd32: begin SCLK <= 1'b1; r_data <= {r_data[10:0], DOUT}; end 6'd11,6'd13,6'd15,6'd17,6'd19,6'd21,6'd23,6'd25,6'd27,6'd29,6'd 31: begin SCLK <= 1'b0; end 6'd33:begin CS_N <= 1'b1; end//将转换结果输出 default:begin CS_N <= 1'b1; end endcase end else ; end else CS_N <= 1'b1;一次转换结束的标志,即 en && SCLK2X && (SCLK_GEN_CNT == 6'd33)为真,并产生一个高脉冲的转换完成标志信号 Conv_Done。一次转换结束后将内部寄存器 r_data 的数据输出到输出端 Data 上。 always@(posedge Clk or negedge Rst_n) if(!Rst_n)begin Data <= 12'd0; Conv_Done <= 1'b0; end else if(en && SCLK2X && (SCLK_GEN_CNT == 6'd33))begin Data <= r_data; Conv_Done <= 1'b1; end else begin Data <= Data; Conv_Done <= 1'b0; endADC 工作状态,在手册中看出 CS_N 在工作时为低电平,因此直接将此信号作为工作状态指示。 assign ADC_State = CS_N;仿真及板级测试 为了测试模块功能,模拟 ADC 芯片的输出。这里用 Sin3e 产生一个正弦波文件,位宽12 位,个数为 4096,并以 sin_12bit.txt 保存当前工程下的 simulation 目录下的 modelsim 文件夹。 这样就需要将产生的数据,发送到 ADC 驱动模块的输入线 DOUT 上,这里使用系统任务$readmemb,其可以用来从文件中读取数据到存储器中。其格式有以下三种: $readmemb("<数据文件名>",<存贮器名>); $readmemb("<数据文件名>",<存贮器名>,<起始地址>); $readmemb("<数据文件名>",<存贮器名>,<起始地址>,<结束地址>。 首先定义文件存放位置。 `define sin_data_file "./sin_12bit.txt"定义 4096 个 12 位的存储单元,然后将波形数据读取到存储器中。 reg[11:0] memory[4095:0];//测试波形数据存储空间 initial $readmemh(`sin_data_file,memory);在测试时将这些数据整体循环三次,进行验证。其中 gene_DOUT(memory[address]);依次将存储器中存储的波形数据读出,按照 ADC 芯片转换结果输出方式的送到 DOUT 信号线上。 integer i; initial begin Rst_n = 0;Channel = 0; En_Conv = 0; DOUT = 0;address = 0; #101; Rst_n = 1; #100; Channel = 5; for(i=0;i<3;i=i+1)begin for(address=0;address<4095;address=address+1)begin En_Conv = 1; #20; En_Conv = 0; gene_DOUT(memory[address]); @(posedge Conv_Done); //等待转换完成信号 #200; end end #20000; $stop; end将存储空间的数据按照 ADC 的数据输出格式,发送到 DOUT 信号线上,供控制模块采集。 task gene_DOUT; input [15:0]vdata; reg [4:0]cnt; begin cnt = 0; wait(!CS_N); while(cnt<16)begin @(negedge SCLK) DOUT = vdata[15-cnt]; cnt = cnt + 1'b1; end end endtask全编译后进行仿真,可看出此次信号较多。这里首先查看与 ADC 相关的使能信号、状态标志信号以及 SCLK 时钟信号等。选中以上这些信号,可以看出,每当外界输入一个周期的 En_Conv 转换信号,模块内部使能信号 en 就置高,一直到转换完成标志信号 Conv_Done有效再置 0。当 SLK2X 计数器值为 33d 且当 SCLK2X 为高时,便输出一个时钟周期的高脉冲信号,标志着本次转换过程结束。同时 SCLK2X 时钟为 ADC 工作时钟 SCLK 的两倍。以上各信号符合既定的设计。 图片 DIN 为 FPGA 控制 ADC 通道选择的信号,这里选择的通道五也就是 ADD[2:0]=101b,可以看出图每个测量循环中发送 DIN 状态均一致。 图片 查看 DOUT 串行数据输出信号,在每个 SCLK 上升沿 DOUT 均会输出一位数据。在第一个转换过程中,DOUT 首先输出 4 个前导 0,然后依次输出 1000_0000_0000b(MSB),也就是在激励文件中例化的正弦波的第一个数据 800h。并在一次转换完成后,输出并行数据 Data。符合既定设计,可以自行分析第二个转换过程。 图片 查看 CS_N 与 ADC_State 工作状态标志信号,可看出当 ADC 处于转换时为低电平,空闲时为高电平,符合设计要求。 图片 将并行输出数据 Data 设置为模拟形式,主要参数如图 25.10 所示,其中波形所占高度可根据实际情况自行设计,此处暂定 100。 图片 重启仿真后可看出数据输入为 3 个周期的正弦波也就是采样正确,符合既定设计。这里如不重启仿真可能会出现如图 25.12 所示的波形影响观测,此为仿真软件本身问题,可不深究。 图片 为了进行板级仿真,新建测试 ADC_test 顶层文件,在顶层文件中例化 ADC 以及 DAC驱动,并设置好相关使能以及标志信号。再分别生成两个 ISSP 文件,其中驱动 DAC 电压数据的命名为 ISSP_DAC(源位宽为 16),采集 ADC 电压以及通道设置的为 ISSP_ADC(源位宽为 3,探针位宽为 12)。分配引脚并全编译后,下载程序,并启动 ISSP。 1.DAC 的 DA 输出端连接 ADC 的 A0 输入端。如图 25.13 所示,使得 DAC 输出电压为0,可测得电压为 0。 图片 2.DAC 的 DA 输出端连接 ADC 的 A0 输入端。此时更新 DB 的输出值,如图 25.14,可以看出 A0 测量数据保持 0 不变。 图片 3.DAC 的 DB 输出端接 ADC 的 A1 输入端。此时更新 DB 值,其理论输出电压为7FF/FFF 4.096=2.048V ,如图 25.15 所示,使能 A1 测量端可测得输入电压为2535/40963.3=2.04V,在误差允许范围内。 图片 DAC的DB输出端接ADC的 A1 输入端。此时更新 DB 值,其理论输出电压为 BD3/FFF 4.096=3.072V,如图 25.16 所示,使能 A1 测 量 端 可 测 得 输 入 电 压 为 3815/4096 3.3=2.07V,在误差允许范围内。 图片 同理可测试的其他 DAC 输出电压以及 ADC 输入测量电压值。此处换算时需注意,DAC电路输出电压范围为 0~4V,ADC 电路测量电压范围为 0~3.3V。 工程代码 图片 在我们设计的驱动模块中,需要给ADC芯片三个控制信号SCLK、CS_N、DIN,还需要有接收ADC转化结果的ADC_OUT。ADC芯片的选址信号通过Channel端给到ADC_driver中,然后通过ADC_DIN给到芯片中,用于选择采集模拟信号的通道。12位宽的Data输出给外部的FIFO缓存。 module adc128s022( Clk, Rst_n, Channel, Data, En_Conv, Conv_Done, ADC_State, DIV_PARAM, ADC_SCLK, ADC_DOUT, ADC_DIN, ADC_CS_N ); input Clk; //输入时钟 input Rst_n; //复位输入,低电平复位 input [2:0]Channel; //ADC转换通道选择 output reg [11:0]Data; //ADC转换结果 input En_Conv; //使能单次转换,该信号为单周期有效,高脉冲使能一次转换 output reg Conv_Done; //转换完成信号,完成转换后产生一个时钟周期的高脉冲 output ADC_State; //ADC工作状态,ADC处于转换时为低电平,空闲时为高电平 input [7:0]DIV_PARAM; //时钟分频设置,实际SCLK时钟 频率 = fclk / (DIV_PARAM * 2) output reg ADC_SCLK; //ADC 串行数据接口时钟信号 output reg ADC_CS_N; //ADC 串行数据接口使能信号 input ADC_DOUT; //ADC转换结果,由ADC输给FPGA output reg ADC_DIN; //ADC控制信号输出,由FPGA发送通道控制字给ADC reg [2:0]r_Channel; //通道选择内部寄存器 reg [11:0]r_data; //转换结果读取内部寄存器 reg [7:0]DIV_CNT;//分频计数器 reg SCLK2X;//2倍SCLK的采样时钟 reg [5:0]SCLK_GEN_CNT;//SCLK生成暨序列机计数器 reg en;//转换使能信号 //在每个使能转换的时候,寄存Channel的值,防止在转换过程中该值发生变化 always@(posedge Clk or negedge Rst_n) if(!Rst_n) r_Channel <= 3'd0; else if(En_Conv) r_Channel <= Channel; else r_Channel <= r_Channel; //产生使能转换信号 always@(posedge Clk or negedge Rst_n) if(!Rst_n) en <= 1'b0; else if(En_Conv) en <= 1'b1; else if(Conv_Done) en <= 1'b0; else en <= en; //生成2倍SCLK使能时钟计数器 always@(posedge Clk or negedge Rst_n) if(!Rst_n) DIV_CNT <= 8'd0; else if(en)begin if(DIV_CNT == (DIV_PARAM - 1'b1)) DIV_CNT <= 8'd0; else DIV_CNT <= DIV_CNT + 1'b1; end else DIV_CNT <= 8'd0; //生成2倍SCLK使能时钟 always@(posedge Clk or negedge Rst_n) if(!Rst_n) SCLK2X <= 1'b0; else if(en && (DIV_CNT == (DIV_PARAM - 1'b1))) SCLK2X <= 1'b1; else SCLK2X <= 1'b0; //生成序列计数器 always@(posedge Clk or negedge Rst_n) if(!Rst_n) SCLK_GEN_CNT <= 6'd0; else if(SCLK2X && en)begin if(SCLK_GEN_CNT == 6'd33) SCLK_GEN_CNT <= 6'd0; else SCLK_GEN_CNT <= SCLK_GEN_CNT + 1'd1; end else SCLK_GEN_CNT <= SCLK_GEN_CNT; //序列机实现ADC串行数据接口的数据发送和接收 always@(posedge Clk or negedge Rst_n) if(!Rst_n)begin ADC_SCLK <= 1'b1; ADC_CS_N <= 1'b1; ADC_DIN <= 1'b1; end else if(en) begin if(SCLK2X)begin case(SCLK_GEN_CNT) 6'd0:begin ADC_CS_N <= 1'b0; end 6'd1:begin ADC_SCLK <= 1'b0; ADC_DIN <= 1'b0; end 6'd2:begin ADC_SCLK <= 1'b1; end 6'd3:begin ADC_SCLK <= 1'b0; end 6'd4:begin ADC_SCLK <= 1'b1; end 6'd5:begin ADC_SCLK <= 1'b0; ADC_DIN <= r_Channel[2];end //addr[2] 6'd6:begin ADC_SCLK <= 1'b1; end 6'd7:begin ADC_SCLK <= 1'b0; ADC_DIN <= r_Channel[1];end //addr[1] 6'd8:begin ADC_SCLK <= 1'b1; end 6'd9:begin ADC_SCLK <= 1'b0; ADC_DIN <= r_Channel[0];end //addr[0] //每个上升沿,寄存ADC串行数据输出线上的转换结果 6'd10,6'd12,6'd14,6'd16,6'd18,6'd20,6'd22,6'd24,6'd26,6'd28,6'd30,6'd32: begin ADC_SCLK <= 1'b1; r_data <= {r_data[10:0], ADC_DOUT}; end //循环移位寄存DOUT上的12个数据 6'd11,6'd13,6'd15,6'd17,6'd19,6'd21,6'd23,6'd25,6'd27,6'd29,6'd31: begin ADC_SCLK <= 1'b0; end 6'd33:begin ADC_CS_N <= 1'b1; end default:begin ADC_CS_N <= 1'b1; end //将转换结果输出 endcase end else ; end else begin ADC_CS_N <= 1'b1; end //转换完成时,将转换结果输出到Data端口,同时产生一个时钟周期的高脉冲信号 always@(posedge Clk or negedge Rst_n) if(!Rst_n)begin Data <= 12'd0; Conv_Done <= 1'b0; end else if(en && SCLK2X && (SCLK_GEN_CNT == 6'd33))begin Data <= r_data; Conv_Done <= 1'b1; end else begin Data <= Data; Conv_Done <= 1'b0; end //产生ADC工作状态指示信号 assign ADC_State = ADC_CS_N; endmodule ADC工程 下载地址:https://wwek.lanzoub.com/iDiv00jdsyrc 提取码: 仿真结果 图片
FPGA&ASIC
# 小实验
刘航宇
4年前
0
1,882
2
2022-10-11
读懂史密斯圆图
史密斯圆图能干啥用? 史密斯圆图,就是做高频电路之间的阻抗匹配用的。所谓阻抗是电路对电的阻碍能力,它是个矢量,也就是说阻抗值是个复数。这里面既包括实部电阻成分一即与电力 "顶牛儿”的那部分阻力;也包括虚部电抗成分一就是把电力拉偏的那部分阻力。两者加一块,就叫阻抗。阻抗匹配,是电路之间连接的一-个基本要求,简单讲就是输入阻抗和输出阻抗大致相当,方向相反。如果阻抗不匹配呢?轻者电路工作效率低,重者.工作异常或直接烧毁。具体到高频电路来说,这些危害不仅都有,而且比数字电路、低频模拟电路上的危害要严重得多。那高频电路的阻抗匹配是啥标准呢?就是让输入端电阻和输出端电阻是纯阻性,而且最好等于509或752 。那原来阻抗不匹配,现在咋弄它就匹配了呢?就是在两个电路之间,接上电容、电感、传输线,微带线、变压器之类的东西。把阻抗值矫正到阻抗相等面来。史密斯圆图的主要用途,一是计算接到电路里的那些电容器、电感器的参数值的。二是用来显示某一电路的频率一阻抗特性的。 史密斯圆图怎么用? 史密斯圆图,它相当于一个地图,它上面每一个点, 都代表一个复数形式的阻抗值,而其圆心叫做匹配点,它代表了实部50om,虚部0om的理想阻抗,那就是我们要到达的地方。做阻抗匹配,就是规划一条从阻抗点走到匹配点的线路。然后呢?然后就是利用这些点位之间的差值做计算了。这个事儿我就不讲了。因为过去用纸本史密斯圆图才需要自己算,现在有很多专用软件能替我们做,不仅能算刚才我提到的那个匹配元件的电容量、电感量,还能算出谐振电路的Q值,驻波比,衰减量等等,这就用不着咱们算了,诸位知道这些概念是啥意思,就行了!至于具体怎么用史密斯圆图软件?怎么看这些数据?怎么评价匹配的效果?别着急,我们后边再聊。 史密斯圆图第二节史密斯圆图该咋看? 简言之,是看一线、两弧和两圆。 我们说过,史密斯圆图上的每个点,都有实部值和虚部值,那么图上的线,其实也只有两种,一是等实部线,二是等虚部线。读史密斯圆图,就是先沿等虚部线,找到实部值,再沿着等实部线找到虚部值。那么一线和两弧,都是等虚部线;两圆,是等实部线!接下来我们就从一线讲起,说说史密斯圆图的刻度划分刻度值 线一一根特殊的等虚部线 图片 史密斯圆图被一条名为电阻线的蓝色横线分成 上下两个半区,上半部分叫电感区, 那里所有点的虛部值都为正;下半部分叫电容区,那里所有点的虚部值都为负。而电阻线本身的虚部阻抗值不正不负,他上面每一个点的阻抗值均为0欧。所以电阻线是一根特殊的虚部线,它是我们查找实部值的一把尺子。 电阻线上有三个点,最左侧的叫短路点,他表示实部值0欧姆,虚部值也为0欧姆的情况;最右侧的叫断路点,他表示实部值无穷大,虚部值也为0欧姆的情况;而中间点,也就是圆心那是匹配点,那里的阻值是“标准阻值”,一般情况下他是50欧姆。“三点” 是史密斯圆图的基点,也是我们校正天线分析仪的起点,一定记住。 归一化处理 但是请注意!虽然电阻线是一把测量实部阻值的尺子,但是这把尺子上标的不一定是实部阻值。纸本的史密斯圆图标注的是阻抗值/标准阻值的比值,这叫归-化处理,这个值叫归-化阻抗值。下图中的小红字标的是阻抗值,而大红字标的是归一化阻抗值9。咱们先说图.上的大红字,那就是归一化之后的阻抗值。如果我们是在纸本史密斯圆图上标图,那第一步应该把阻抗值转换成归一化阻抗值。 图片 以标准阻抗50欧姆为例。我们要找100欧姆的实部值,就去电阻线上找归一化阻抗值为100欧姆/50欧姆=2的点,而图上显示"0.2" 归一化阻抗值的地方,其实际阻抗值就是0.2*50欧姆= 10欧姆,而匹配点的归一化阻抗值永远为1,这是归一化阻抗标注法的一个识别标志。为什么要用归一化阻抗值标注刻度呢?因为很多时候,我们不是要把电路匹配到50欧姆上,而是要匹配到75欧姆或者300欧姆等阻抗上。 请看下图,这是75欧姆标准电阻时,史密斯原图上的情况,其中电阻线下方写的红字是阻抗值。电阻线上方的写的红字是归一化阻抗值。 图片 第二套刻度一一导纳值和归一化导纳值 等电阻线是一把度量实部值的尺子,它有阻抗值和归一化阻抗值和两种标注方法,其实在电脑版史密斯圆图的等电阻线上,还有一套刻度。就是用大绿字标注的归一化导纳值和用小绿字标注的导纳值。 有人想问导纳值是啥?导是电阻值的倒数,纳是电抗值的倒数,导纳加一块就是导纳值,它是阻抗值的倒数,导纳值的单位是西门子,写作“S",1S等于= 1000mS。给导纳值做归一化,也就是 将导纳值除以0.02S标准导纳值(0.02S, 其实就是1/50欧姆)。这两种标法的值,是等价的。 图片 例如,电阻线上25Ω那个点,它的导纳值为1/25Ω=0.04S,它的归一化导纳值就是0.04S/0.02S为=2。 导纳值既然和阻抗值完全等价,用法也一样,那我们要这个玩意做啥呢?简单讲,我们在标注初始阻抗点时,要根据红色的阻抗值坐标系做,而在做阻抗匹配时,则要用到绿色的导纳值坐标系。 两圆两弧---等实部圆和等虚部弧 图片 两圆---两种等实部线 讲特殊的电阻线--也就是0欧姆等虚部线之后,我们看看与电阻线相切的那些圆形。这些圆圈都是等实部线,那上面每一条线的实部值都相等。其中红色的圆圈都叫阻抗圆,而绿色的圆圈都叫导纳圆,我们在电阻线.上找到实部阻抗值或者实部导纳值之后,就要沿着阻抗圆或者电纳圆去找虚部 值。其中电阻线以上的点是正值,代表阻抗点的虚部值呈现感性,电阻线以下的点是负值,代表阻 抗点的虚部值呈现容性。 和看电阻线的规矩一-样,我们在标注初始阻抗值时只看红色的。 两弧---两种等虚部线 那么虚部值到那去查?从断路点发出,向史密斯圆图边界放射的红线叫等电抗弧;而从短路点发出,向史密斯圆图边界反射的绿线都叫等电纳弧9。这些都是等虚部线,我们找到实部值后,就是沿着实部线9到找到特定值的等虚部线,那虚部线的值标哪儿了呢,在史密斯圆图的外边界上。和刚才-个规矩,我们标初始阻抗值时是根据红色数字做的。总结一下,到底怎么读图? 总结一下,到底怎么读图? 第一步,用阻抗值除以标准电阻,得到归一化实部阻抗值和归一化虚部阻抗值。 第二步,在等电阻线上,找到归一化实部阻抗值对应的阻抗圆。 第三步,沿着阻抗圆,向上或向下旋转,找与归一化虚部阻抗值对应的等电抗弧。 第四步,做个记号,就算OK。 举个栗子~! 1002-j50Ω滴点在哪儿? 第一步,计算归一化实部阻抗值为100Ω/50Ω=2;归一化虚部阻抗值为-50Ω/50Ω=-1。 第二步,在等电阻线上,找到归一化阻抗值为2的阻抗圆。 第三步,沿着归一化阻抗值为2的阻抗圆下旋,转到-1 那个电抗弧上。 第四步,做个记号!我标的是X。 图片 那如果图.上标的是阻抗值呢? 如果是在电脑上识图,图上直接标注的阻抗值,那就更方便了,实部阻抗值标在阻抗圆上,虚部阻抗值写在电抗弧末端。我们标图的时候,不用换算,先根据实部阻抗值找到对应的阻抗圆,再沿着阻抗圆去查对应虚部阻抗值的电抗弧,然后做个记号,就OK啦~ 例如: 我要查100Ω+j50Ω的点,先找到100Ω阻抗圆,然后沿着它的轨迹上旋,到达虚部值为502的地方,然后做个标记,就是Y点。 归一化导纳值呢? 简单讲,导纳值坐标系和阻抗值的查法、标注方法完全一样。 第一步,用导纳值除以标准导纳值,得到归一化导纳值, 第二步,在等电阻线上,找到归一化实部导纳值对应的那个导纳圆。 第三步,沿着导纳圆向上或向下旋转,找与归一化虚部导纳值对应的等电纳弧。 第四步,做个记号,就算OK。 再举个栗子 0.04S+j0.02S的点在哪儿? 第一步,计算归一化实部导纳值为0.04S/0.02S=2;归一化虚部导纳值为0.02S/0.02S=1. 第二步,在等电阻线上,找到归一化导纳值为2的导纳圆。 第三步,沿着归一化导纳值为2的导纳圆上旋,转到导纳值为1的那个电纳弧上。 第四步,做个记号!即Z。 那如果图上标的是导纳值呢? 那也简单,先根据实部导纳值找到对应的导纳圆,再沿着导纳圆去查对应虚部导纳值的电纳弧,然后做个记号,就OK啦~. 例如: 我要查0.04S-j0.02S的点,先找到0.04S导纳圆,然后沿着它的轨迹下旋,到达虚部值为-0.02S的地方,然后做个标记,那就是S点。 好了~!关于怎么查史密斯圆图的事儿,我讲完了,接下来请大家做点练习,看看是否理解了。下一次我们学习如何用史密斯圆图做阻抗匹配。 读图练习 第一题,1点的阻抗值为50Ω+j50N,请问1点在图上什么位置? 第二题,2点的归一化阻抗值为0.5+j0.5,请问2点在图.上什么位置? 第三题,3点导纳值为0.04S-j0.02S,请问3点在图上什么位置? 第四题,4点归一化导纳值为0.5-j0.2,请问4点在图上什么位置? 请把上图打印出来,试着标一下,然后再看文末那个答案。 答案 图片 史密斯圆图第三节怎么用史密斯圆图软件做阻抗匹配 史密斯圆图软件做阻抗匹配有六句口诀:先设参数,后选起点,下容上感,左并右串,顺着圆走,往圆心转。 smithV3.1软件的界面,然后按着口诀顺序,一点点说。然后举个设计例子,最后讲讲注意事项。 软件界面简介 打开SmithV3.1,首先看到左侧-一个有个史密斯圆图,那是我们的操作区域。这里我要着重强调一下,电脑软件上标的都是实际阻抗值,而不是归一化阻抗值,所以我们做阻抗匹配的时候不用换算数据了,但是要在匹配之前设置好频率值和标准电阻值,否则做出来的数据会和现实完全对不上的。 图片 右侧有几个重要窗口,最顶上的是Schematic窗口,当我们在左侧史密斯圆图上用鼠标做匹配的时候,这个窗口里会显示相应的电路图,比如我图.上画的这个匹配路径对应到电路上,就是先双联13.9p电容,再并联23.4nH电感。 图片 下方这个Cursor窗口也很重要哦。它里面标注的是光标所在点的具体参数,这其中最重要的当然是VSWR驻波比、和Z阻抗值, Zo标准电阻值, Freq频率值。 这其中后两项参数是需要我们在做匹配之前要手工输入的。 先设参数,再选起点, 先设参数:就是要设置工作频率和标准阻抗这两个值。 再选起点:就是要把阻抗点的具体位置设到史密斯圆图.上。 我们点击图片 这个图标,然后在 图片 这个页面的左下角General这输入标准阻抗值50Ω,在datapoint那儿输入工作频率,默认设置是500MHz。 图片 然后我们点击 图片 按钮,软件都会弹出这个窗口。 图片 我们在这选中impedance (Ω), 并在下面两个空里填写阻抗点的实部阻抗值和虚部阻抗值,这就样就设好起点了. 然后呢?然后就该我们添加元件了。 下容上感,左并右串 我们点击工具栏的这个部分,就可以在阻抗点上连接电容或电感了。 图片 怎么接线呢?这有两句口诀:下容上感,左并右串。那我们参照下图看一看。 图片 ”下容上感”,是说史密斯圆图的电阻线上方是电感区,下方是电容区,因此呢,我们要往下移动阻抗点,就得接电容;要往上移动阻抗点,就得接电感。那具体是串电容还是并电容,又或者是串电感还是并电感呢?我们来看下一-句左并右串。 “左并右串”,是说如果我们要沿着左侧这组蓝色的导纳圆移动阻抗点,就点击“并联元件”,也就是点工具栏上这两个按钮 图片 ;如果我们要沿着右侧这组红色的阻抗圆移动阻抗点,就点击“串联元件”,就点工具栏上的这两个按钮 图片 顺着圆走,往圆心转 那我们究竟怎么走到标准阻抗点呢?那第五句和第六句说的问题。 所谓“顺着圆走”,是说顺着右侧的50阻抗圆或顺着左侧那个20mS导纳圆走,为什么呢?因为这两个圆都与匹配点相切,所以无论我们走什么路径去匹配点,都得经过其中-一个圆,而“往圆心转”是说我们无论沿着.上面哪条弧线旋转,最终都是往史密斯圆图的中心旋转。等我们把阻抗点挪到自己认为合适的位置后,右侧Schemat窗口里也就画出来了我们的阻抗匹配电路。 一个栗子 某功率放大器的要放大100M信号,其输入阻抗值为252+j352,而信号源阻抗为50Q,现在要在 两者之间接一个匹配电路,为此我要如此操作。 先设参数:我们点击 图片 这个图标,然后在 图片 这个页面的左下角General这输入标准阻抗值50Ω,在Datapoint那儿输入工作频率100MHz。然后点ok按钮。 图片 再选起点:我们点击 图片 按钮,软件都会弹出这个窗口 图片 我们在这选中impedance,然后在下面的两个空里填入实部值25欧姆、虚部值+35欧姆,点ok就行了。这时候我们发现,史密斯圆图上会出现一个方形坐标点DP1. 图片 下容上感,左并右串。顺着圆走,往圆心转那接下来,我们就要通过连接元件,改变阻抗点的阻抗了。由于DP1位于史密斯圆图的电感区,所以我们要让他往下转,那旋转是有很多路径,我们先说最简单的,从DP1直接转到20mS导纳圆上,在顺着20mS导纳圆上继续下旋到圆心。当然这是我们的设想,实际不一定能实现,我们就先以此为目标,试试看吧。 那由于我是要向下移动阻抗点,也就是向电容区移动阻抗点,所以我要连接电容。由于我是沿着右侧的25欧姆阻抗线向下移动,左并右串,所以我应该选串联电容,也就是点 图片 我们点了串联电容按钮之后,会发现光标不能自由移动了,它只能是沿着红色的25欧姆阻抗圆移动,这就是smithV3.1软件的便利之处,他能防止我们走错路。那我们按软件限定的路线,沿着25欧姆阻抗圆下旋,发现有两次机会转到20mS导纳线上,我选哪一次呢?我们设想中是选第一次机会,但是我看到右侧Schenatic窗口里,要添加的串联电容是155pf就改主意了,因为这是个非标容量,说白了我让谁买也买不来这型号的电容。于是我继续沿着25欧姆阻抗圆向下旋转,到第二个交汇点去碰碰运气。那我到达25欧姆阻抗线与20mS导纳线第二次相交的地方一看,发现右侧Schenatic窗口里显示的是串联的是26p电容,这个参数与27p极为接近,那这容量的电容有地方买,所以我就 在这儿点下鼠标左键,图片上就出现了DP2点。 那接下来,我是要由DP2沿着20mS导纳圆上旋对吧?因为下容上感,所以我们要接电感,因为左并右串,我们要沿着左侧圆走,所以要并联电感,那我们点 图片 和第一步一样,我们还是要沿着电脑规划的线路边走边看,走到圆心时,我们发现右侧Schemat窗口里,显示的电感值是80nH左右,这个电感没啥制作难度,所以我就再次点击鼠标左键,史密斯圆图中心附近就会多出来一个DP3。 也就是路径4这个图。 图片 那我们到了这个DP3又意味着什么呢?我们别挪动光标,我们把鼠标停在DP3上,把视线挪到Cursor这个小窗上,在这我们会看到Q值0.005, VSWR1.03等参数。显然,VSWR约等于1,是个 很好的结果,实际小信号的SWR匹配到1 .5就以很好了。而大功率的通讯设备,需要尽量往小了做,做到1.2以下。 两个问题 首先,我们还可以有别的匹配路径么?当然可以,条条大路通罗马。 刚才我们走的路径是先串后并,用了一一个电容一个电感,走20mS导纳圆到的中点,也就是图上的路径1。那如果我们改走右边的509阻抗圆行么?行啊,完全可以。我们可以先并联16pf电容,再串联51pf电容。这就是路径2。 那还有别的路可走么?有啊,比如我们可以选用阻抗匹配变压器,也就是先串联47pf电容,下旋到电阻线,再使用1:1 .4的阻抗变压器,沿着等Q值弧线(也就是从短路点、断路点之间的蓝色弧线,参见文末的图例)向右移动到圆心,这就是路径39。 那还有别的么?有啊,我们还可以接电阻,走等虚部弧。比如我们可以走路径4,即先串联电阻,从DP1进到右边50Q阻抗圆.上,然后再串电容沿着50Q阻抗圆继续下旋,这也是可以的。只不过要注意两个问题,第- -点, 我们接电阻走等虚部线的时候,虽然匹配上了,但是会增加电路损耗的。第二点,由于现实中可没有合用的负阻元件卖,所以我们做匹配时绝不能沿着等虚部线退着走,也就是说不能接负阻器件,这- -点smith3.1软件考虑到了,他会限制我们那么做,但是其他软件或纸本的史密斯圆图就得注意这问题。 图片 其次,如果我们做匹配时转不到史密斯圆图的正中心(不太可能),或者实际制作中对不到史密斯圆图中心(很常见),那又 意味着什么? 请看下图,图上这些棕色圆圈是等VSWR圆,也就是等驻波比圆,这个驻波比圆的特点是越靠近圆心,驻波比越小,比如圆心那- -点是1.也就是说输入端送出进去多少信号,负载端就吸收多少信号,能量一点没糟践;驻波比1.5, 意味着有4%的功率撞到输出端又撞回输入端了。驻波比29,就意味着有11%的能量撞回去了。通常来说,小信号阻抗匹配电路对驻波比要求比较低,达到1.5就算良好匹配了。如果体积有限制,还可以进一步放宽一些。 但是如果是强信号,电台天线那种场合,SWR控制的就比较严格了,大功率电台,通信基站要控制在1.2以内。 图片
嵌入式&系统
# 天线设计
# 电子线路
刘航宇
4年前
0
4,126
8
GNURadio-软件无线电入门教程
目录 第一章 GNURadio 和软件无线电概述1.1什么是 GNU Radio 1.2为什么我们要使用 GNU Radio 1.3关于数字信号处理 1.4GNU Radio 是如何工作的 第二章 GNU Radio 软件安装与配置2.1操作系统的选择 2.2Linux 环境下的直接安装 2.3Linux 下使用PyBOMBS 辅助自动从源码构建 2.4Linux 下手动从源码编译构建请参阅: 2.5Windows 环境下的安装 2.6Mac OS X 环境下的安装 第三章 教程初阶3.1熟悉使用 GNU Radio Companion 第一章 GNURadio 和软件无线电概述 1.1什么是 GNU Radio GNU Radio 是一个软件框架,使用户能够设计、模拟和部署功能强大的软件无线电系统。它是一个高度模块化的,面向“流程图”的框架,带有一个全面的处理模块库,可以轻松组合并构成复杂的信号处理系统的应用程序。 GNU Radio 已用于大量的无线电应用程序。包括音频处理,移动通信,跟踪卫星,雷达系统,GSM,数字无线电等等,所有这些都在计算机软件中使用。 1.2为什么我们要使用 GNU Radio 以前,在开发无线电通信设备时,工程师必须先开发用于接收并处理特定信号的接收机, 来对特定信号传输进行解码或编码。随着数字信号处理与其算法越来越复杂,这些信号处理的平台也变得越来越复杂,通常需要较为高速的 ADC、FPGA 以及能将实时数据串流到计算机平台的连接芯片等,每个系统所对应的硬件平台不一定是一样的,这就带来了巨大的开发成本。通过使用软件无线电(SDR)设备进行模拟信号处理,在相同的硬件平台上可以同时兼容运行各种不同的软件程序,不仅节约了开发成本,也提高了开发新系统的效率。 1.3关于数字信号处理 作为一种软件框架,GNU Radio 通过硬件平台串流的比特数据流输入到计算机中,并在操作系统中运行相应的应用程序以此达到对特性信号进行处理的目的。 我们都知道计算机只能处理数字信号。如何去理解数字信号呢? 简单举个例子:当你想要录制一段人声的时候,说话的人会产生声音信号,该信号由震动导致周围气压发生变化而产生。这样一个时变的物理量就是一种信号。 图片 当空气波到达麦克风时,麦克风将变化的压力转换为电信号,即可变电压 图片 现在我们已经将信号转化为了电信号,在一些模拟系统中,已经可以开始对信号进行处 理。但是对于我们的计算机系统,一个数字的系统,这还远远不够。为了使计算机能够处理这样的数据,我们还需要满足两个条条件:1.是有限点数的 2.是在有限时间之内的 图片 因此,该数字信号可以由称为样本的数字序列表示。采样之间的固定时间间隔直接影响到采样率。提取物理量(电压)并将其转换为数字样本的过程由模数转换器(ADC)完成。相反,我们还有数模转换器(DAC),可从将计算机中提取数字序列转换为模拟信号。 现在我们已经有了一个数字序列,我们的计算机就可以使用它进行各种操作。 图片 同样,电磁波显然也是一种波,它跟声波有许多相同的性质。我们可以用天线将变化的电信号发射出去,这个电信号一般位于一个较高的频率上,可以是数百 KHz 到 GHz。通过使用软件无线电接收机,我们可以接收并对这些信号进行处理,以此进行我们想要的操作。 1.4GNU Radio 是如何工作的 在 GNU Radio 中,为了处理数字信号,我们可以使用简单的流程指示箭头将其连接: l1psgx5b.png图片 在上图中,Signal Source 即为信号源,左边的输入接口可以输入频率参数,右边的输出接口可以输出音频数据流。右边的 Audio Sink 为音频接收器,允许通过扬声器或其他音频设备播放出输入的信号。这就构成了一个十分简单的流程图,点击软件中的运行按钮即可非常简单快捷的编译流程图并运行。 GNU Radio 是一个框架,用于开发这些处理模块并创建流程图。软件自带大量的处理模 块,在这里简单举例一些: Waveform Generators 信号发生器 Constant Source 常数源(可以理解成直流分量) Noise Source 噪声源 Signal Source (e.g. Sine, Square, Saw Tooth) 信号源 Modulators AM Demod AM 解调 Continuous Phase Modulation 连续相位调制 PSK Mod / Demod PSK 调制/解调 GFSK Mod / Demod GFSK 调制/解调 GMSK Mod / Demod GMSK 调制/解调 QAM Mod / Demod QAM 调制/解调 WBFM Receive 宽带 FM 接收机 NBFM Receive 窄带FM 接收机 使用这些模块,我们只需要进行相应的连接操作,就可以快速搭建数字信号处理系统。另外,当然你也可以自己开发新的 block,或者将现有的块与其他软件结合在一起,开发出新的功能。 因此,GNU Radio 主要是用于开发信号处理模块及其交互的软件框架。它带有广泛的标准块库,开发人员可以在其中构建许多系统,是十分方便的软件无线电开发工具。 第二章 GNU Radio 软件安装与配置 GNURadio 的官方 GitHub 页面为 https://github.com/gnuradio/gnuradio。其首页中也明确说明了对于不同操作系统的不同安装方式。 2.1操作系统的选择 我个人最推荐使用 Ubuntu18.04 我在这个系统版本上搭建过很多次所需要的环境,没怎么出过问题,使用一直很稳定。19 版本或许可以,我没有尝试过,但是 20 版本一定不可以, 因为有接到过软件报错的情况报告。 2.2Linux 环境下的直接安装 对于GNU Radio,如果只是简单轻度使用我就建议大家直接使用 Linux 的二进制软件包安装。最快捷方便而且最重要不容易出错。根据 GNURadio 官方 GitHub 界面,首先的安装方式也是直接使用 apt 安装。 以下命令适用于 Debian,Ubuntu 及其衍生版本。它将使用 Python2 安装 GNURadio 3.7 版 sudo apt install gnuradio 对于以上操作系统,直接执行这条命令即可安装完成。如果遇到报错建议自行查询报错信息解决。对于其他 Linux 发行版,请查阅: https://wiki.gnuradio.org/index.php/InstallingGR#From_Binaries 2.3Linux 下使用PyBOMBS 辅助自动从源码构建 PyBOMBS 是安装GNURadio 以及相关软件工具的一个快捷工具。你可以使用它来安装各种 SDR 设备所依赖的支持库,绝大部分操作都是全自动的。 PyBOMBS 是方便用来从源代码构建 GNU Radio,UHD 和各种 Out of Tree(OOT)模块,然后将其安装到指定的用户目录中的工具。在使用之前,PyBOMBS 会检测用户的操作系统并在构建的第一阶段加载所有先决条件(可能会出现各种花式报错)。如果你对于自己解决 Linux 环境配置问题不是很有信心,我不建议你使用这种方法安gnuradio。 注意!!:GitHub 中详细描述了安装的步骤,请自行参阅: 项目地址:https://github.com/gnuradio/pybombs 因为它是从源代码安装GNU Radio,所以第五步可能需要一些时间,要进行更快的安装, 请参阅 https://wiki.gnuradio.org/index.php/InstallingGR#Ubuntu_PPA_Installation 2.4Linux 下手动从源码编译构建请参阅: https://wiki.gnuradio.org/index.php/InstallingGR#From_Binaries 2.5Windows 环境下的安装 在 Windows 环境下,官方提供了非正式版的 GNU Radio 3.7 和 3.8 的安装文件,虽然我也不推荐你真的在 Windows 平台运行这个软件,但是它在 Win 平台是真的可以使用的。不管是 USRP 还是 PlutoSDR,有驱动程序的话就可以使用。对于 USRP,可能存在固件版本的问题,按照教程后面的解决办法是可以解决的。 相关的安装软件包在这里下载:http://www.gcndevelopment.com/gnuradio/index.htm 2.6Mac OS X 环境下的安装 你是认真的? 请参阅:https://wiki.gnuradio.org/index.php/MacInstall 第三章 教程初阶 3.1熟悉使用 GNU Radio Companion 学习目的: 使用标准块库创建流程图 了解如何使用检测模块 Sink 调试流程图 了解GNU Radio 中的采样和调节功能 了解如何使用文档找出模块的功能 在本教程中,我们将从简单框图开始,探讨如何使用 GNU Radio 的图形工具GNU Radio Companion(GRC)来创建不同的框图。GRC 是为了简化 GNU Radio 而诞生的,有了它, 我们可以以图形化编程的方式创建 python 脚本,替代了传统的复杂代码编写,进而降低软件无线电编程的入门门槛。 那么我们开始。首先打开终端,输入以下指令。 $ sudo gnuradio-companion或者直接单击软件图标,也是可以运行软件的。 图片 如果你发现不仅应用程序中没有出现软件图标,而且终端也不能打开这个软件,那么你的安装很有可能出现了问题。请检查安装是否存在问题。 这里有一点区别。当你通过终端运行 GRC 时,下图绿色部分的终端会同时在系统终端里显示。而如果直接通过点击软件图标运行则只能在GRC 的终端面板中观察信息。 图片 首先我们来介绍软件界面。总共分为五个部分:库,工具栏,终端,工作区和变量。 红色区域为工具栏部分,放置了平时最常用的工具,比如运行、停止、编译等重要功能按键。 l1psl5it.png图片 新建、打开、保存、关闭 l1q067qo.png图片 打开/关闭变量编辑器、截图、剪切、复制、粘贴、删除选中模块 l1q06j9q.png图片 查看错误信息、编译流程图、执行流程图、停止运行流程图 l1q06to8.png图片 撤销、重做 l1q074k2.png图片 启用选中模块、禁用选中模块、绕过选中模块、反转禁用连接/模块的状态 l1q07e6n.png图片 查找模块、重置模块、打开选中阶梯模块源码 蓝色区域即为我们绘制具体流程图的地方。我们可以将右边灰色部分库中的模块拖入蓝色区域,并且将他们通过箭头连接起来,这样就可以构成一个真正的信号处理系统。 黄色部分显示的是当前框图中所使用到的变量。在蓝色部分的左上角可以看到两个方框, 分别是 Options 与 Variable,这两个是创建工程时就会自动创建的。 在界面的右边灰色区域中,存放了大量可以用于拖拽到流程图中的模块。其中有很大一部分是软件安装时就自带的,如果你安装了其他gnuradio 附属的插件脚本,也会一并显示在框中,通常自行安装的会显示在最后面。 图片 因为模块非常多,因此平时寻找想要的模块时一个一个手动翻找会非常麻烦。此时可 以点击工具架上的放大镜图标,或是输入 Ctrl + f 输入该块的关键字进行检索,就可以更容易的找到这个block。 例如,这里我们输入 sink(接收器),就可以看到包含单词“接收器”的所有块以及将在其中找到每个块的类别。 l1q08cz9.png图片 现在,我们来添加一个名为 QT GUI Time Sink 的块,方法是单击其名称并将其拖动到工作区中,或者双击其名称以将其自动放置在工作区中。 图片 工作区包含构成流程图的所有块,在每个块内部都有不同的块参数,但是,每个新流程图都需要有一个特殊的块,称为“选项块”。让我们双击选项块以检查其属性。 双击opthions 模块可以看到它的具体内容。Options 中包含了工程的特殊参数设置,每个流程图仅允许存在一个这样的选项模块。 图片 上面的 ID,title,author,description,分别表示这个流程图的 ID,标题以及作者和简介。该块的 ID 决定了生成文件的名称和类的名称。例如,一个 ID 为 top_block 的文件将生成文件 top_block.py 和 top_block 类。 Cavans Size 窗口大小控制流程图编辑器的尺寸。窗口大小(宽度,高度)必须介于 (300,300)和(4096,4096)之间。 Generate options 生成选项控制生成的代码的类型。非GUI 流程图应避免使用带有GUI 的组件或图形变量控件。 Run:流程图的运行可由变量控制,以在需要时启动和停止流程图。 Max number of output 最大输出数是流程图中任何方框所允许的最大输出项数;要禁用此功能,将max_nouts 设置为 0 即可。使用此功能可以调整流程图可以显示的最大延迟。 可以注意到另一个关键的东西。我们可以输入信息的字段中存在的不同颜色。这些实际上对应于不同的数据类型,我们将在本教程的后面部分介绍这些数据类型。 GRC 将我们在编辑器中创建的流程图转换为Python 脚本。因此当我们执行流程图时, 实际上是在运行编译好的Python 程序。ID 用于命名该 Python 文件,该文件与.grc 文件保存在同一文件夹内。默认情况下,ID 是默认值,因此它将创建一个名为 default.py 的文 件。更改 ID 可让我们更改保存的文件名,以便更好地管理文件。在 GNUradio 3.8 中,如果不更改默认 ID,则会收到错误消息,因此需要更改此 ID 才能运行流程图。 l1q0acje.png图片 Variable 即变量,它的 ID 是 samp_rate,你可以在框图中的其他地方调用这个变量。 例如: l1q0amjo.png图片 这样这里的数值就会随着该变量的变化而变化。 如果你点进了设置面板的第三个选项卡,就能看到有关这个block 的文档。通常情况下正规的 block 都是会写使用文档的,当然少数自定义的模块可能是没有的。 虽然这些说明是英文的,但是我十分建议大家自己去用谷歌等工具翻译一下这些文档,因为教程不可能每个详细的点都能讲到,有时还是得靠自己查一查的。 l1q0b5kp.png图片 如果我们删除了一个重要的参数,或是填入了什么不正确的参数,以至于我们的框图无法正常运行,那么此时你会看到执行按钮变成灰色不可点击的状态。此时报错信息按钮亮起,并且在出现错误的block 上,它的名称出现了红色的高亮显示。 l1q0bis5.png图片 你可以点击这个按钮,就可以看到存在问题的错误信息。 l1q0bsmb.png图片 在错误信息中,详细指出了错误出现的位置(如果看不懂就用翻译工具翻译一下,不过英语这么差我建议你直接放弃,这玩意高中生都能看懂。#日常劝退)我们只需要按照报错信息所提示的位置:模块-top block-选项中的一个参数:max_nouts l1q0c3uy.png图片 双击打开这个模块,就可以看到在模块中也存在同样的错误信息提示位于正下方。 l1q0cmos.png图片 错误明确指出,在这个输入框中数值“”不能被接受,因为这里必须填写的是一个数字, 我们填写数字 0 进去后点击确定,即可发现错误信息已经消失。执行按钮也亮起,说明框图无明显错误,可以正常运行。 现在,我们对如何找到块,如何将它们添加到工作区以及如何编辑块属性有了更好的了解,下面我们随意以几个 block 组成一个框图来进行简单的演示。 刚才我们拖入了 QT GUI Time Sink 这个模块,这是个图形接收器,可以同时显示多个信号。接下来我们搜索并向流程图中添加 Signal Source(信号源)模块,和 Throttle(节气门)模块,有关这几个模块详细的说明将在之后的教程中详细讲解,现在只需知道此块会限制流程图的某些数据即可,以确保它不会占用 100%CPU 资源导致电脑直接卡到裂开。 l1q0daor.png图片 “生成流程图”,“ 执行流程图”和“终止流程图”的快捷键分别为 F5,F6 和 F7。你可以在我们刚刚提到的工具架上点击这些按钮,或者直接按快捷键来进行相关的操作。当你按下生成流程图按钮之后,软件就会自动将你刚才绘制的流程图转化为一个 python 脚本文件。单击执行流程图按钮之后,就可以看到以下运行结果。 l1q0dl85.png图片 如果你不想运行了,只要点击终止流程图即可停止当前运行的程序。这样我们的第一个流程图就成功运行了。这是一个从信号源产生信号,经过限流器限制后输出到 time sink 进行接收并显示到屏幕上的操作。 你可以注意到这里有两根数据曲线被绘制出来,他们都来自于 Data 0,蓝色的曲线为Re(实部),红色部分为 Im(虚部)。 如果你根本不知道Re 和 Im 是什么个玩意儿,那么我建议你先学习下我们电子通信类专业的一门必修课程《复变函数》,这将会对你的系统性学习产生很大的帮助。 l1q0e32p.png图片 (有意思的是这两个信号的相位差正好为 ,这对于我们的零中频(Zero-IF)接收/发 2 射机有至关重要的意义,不过这个咱们以后有机会再提。) 在这个流程图中,我们很轻松的就把所有的block 连起来了,轻松的离谱你不觉得吗? 没有出现任何头疼的问题或是错误。那么有没有会出现错误的情形呢?当然有,而且经常会有。 Source IO size "8" does not match sink IO size "4". 源 IO 大小“ 8”与接收器 IO 大小“ 4”不匹配。 这似乎是一个和数据类型有关的报错。既然出现了这个错误,那么就说明我们还没有搞懂框图输入输出的数据类型到底是个什么玩意儿。那么现在就让我们点击软件上方的 help,这里面有对于数据类型的说明。 图片 图片 (最上面那个棕色的看的不是很清楚,不过这问题不大,你用鼠标把它选中高亮就能看清了。) 我们可以看到在许多编程语言中都可以看到的常见数据类型。在我们刚才搭建的流程图中,你可以注意到所有连接的模块端口均是蓝色的,这代表当前所传输的数据为Complex Float 32 类型,这意味着它们同时包含实部和虚部,并且每一个都是 Float 32 类型。我们可以推断出,当“Time Sink 时间接收器”采集到这样一个Complex 的数据类型时, 它将在两个不同的通道上同时输出实部和虚部的图像,也就是我们刚才看到的红蓝两种颜色的图像了。 现在进入其 Signal Source 的属性面板,并更改“输出类型”参数,将信号源更改为浮点型输出。此时我们传输的数据流是一个普通的 32 位浮点数。 图片 图片 可以看到现在我们所有连接的点均变成了橘色,(当然 throttle 也要调整,别问我为什么它还是蓝色的),这也就说明了目前数据类型均匹配,当然刚才出现的报错也就消失了。 图片 有同学发现 throttle 的输出连接了两个 block。不同的节点之间是可以支持多条同样的数据链路的,这是非常方便的一点,也是绝大部分图形化编程界面都具有的功能。可以注意到刚才的两条线此时变成了只有一条线,这是因为我们刚刚修改了数据类型。 现在让我们来尝试一些更复杂的框图吧。 图片 运行结果如下: 图片
通信&信息处理
# 软件无线电
刘航宇
4年前
0
5,972
6
上一页
1
2
3
4
下一页